
半球谐振陀螺组合零偏稳定性提升技术研究
2015-03-10 07:01:20齐轶楠赵万良
导航定位与授时 2015年6期
齐轶楠,赵 辉,赵万良,张 强
(1.上海交通大学,上海200030;2.上海航天控制技术研究所,上海200233)
半球谐振陀螺组合零偏稳定性提升技术研究
齐轶楠1,赵 辉1,赵万良2,张 强2
(1.上海交通大学,上海200030;2.上海航天控制技术研究所,上海200233)
星载陀螺组合的零偏稳定性将直接影响姿轨控分系统对姿态变化的测量精度。针对影响半球谐振陀螺组合输出零偏稳定性的因素进行了分析,研究了温度影响输出变化的机理,并提出了相应的解决措施。工程实践表明,这些措施以较低的成本有效地提升了半球谐振陀螺组合的零偏稳定性。
半球谐振陀螺组合;零偏稳定性;误差分析;温度控制
0 引言
陀螺组合是卫星姿轨控分系统的重要敏感器件,用于敏感卫星星体的惯性角速度,输出其在星体坐标系上的分量,为卫星各个工作模式和飞行阶段提供连续的三轴惯性角速度信息,用于卫星的速率阻尼和姿态稳定性控制。从国内外研究情况来看,光纤陀螺、半球谐振陀螺是未来空间应用(寿命大于10年)高精度陀螺的重点发展方向。半球谐振陀螺利用径向驻波振动的谐振子旋转产生的哥氏效应(Coriolis effect)引起振型的移动来实现角度或转速测量。这种陀螺工作的前提是谐振子以一定的频率做持续振动,具有重量轻、功耗低、起动时间短、时间常数大、抗干扰能力强等优点,并且其稳定性和分辨率高、噪声低,抗辐射能力强,适合于空间环境的应用。
目前在研的半球谐振陀螺组合采用了3正交1斜装的敏感表头的构型,各陀螺通道输出模拟电压信号,并由V/F电路转换成频率信号,经陀螺组合的FPGA处理后输出给姿轨控分系统进行卫星姿态的控制。陀螺组合各通道的输出零偏是各敏感轴角速度测量的基准,它的稳定性直接关系到角速度测量的精度,进而直接影响姿态控制的精度。因此,有必要对影响半球谐振陀螺组合输出零偏的因素进行分析,并找出相应的有效措施,保证零位的稳定性指标在允许的范围内。影响半球谐振陀螺组合输出零偏稳定性的因素主要有半球谐振陀螺表头的加工工艺、表头三件套的装配精度、陀螺控制电路的控制精度、V/F电路的稳定性等。在加工工艺、器件制造等水平一定的情况下,温度是影响半球谐振陀螺组合零偏输出变化的最重要外界干扰因素。
1 误差分析
1.1 半球谐振陀螺组合信号输出的误差模型
图1是半球谐振陀螺组合信号传递流程示意图。
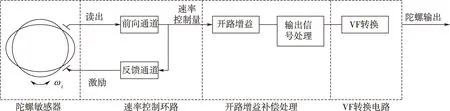
图1 半球谐振陀螺组合信号传递流程示意图Fig.1 Flow diagram of the signal transmission of the hemispherical resonator gyroscope unit
半球谐振陀螺组合输出的信号是数字量,该量的信息由陀螺敏感器的输出与V/F转换电路的相关参数共同决定(图2),它们各自的零偏误差有叠加效应,共同作用影响了陀螺组合输出的零偏稳定性指标。
Data=(kvΩ+kvktT/3600)kf+f0
(1)
式中:Ω为相对于陀螺组合的敏感轴输入的角速度;
kv为陀螺输出标度系数;
T为开氏温度;
kt为表头零偏与温度间的系数;
kf为V/F的标度系数;
f0为V/F转换电路输出的零偏。
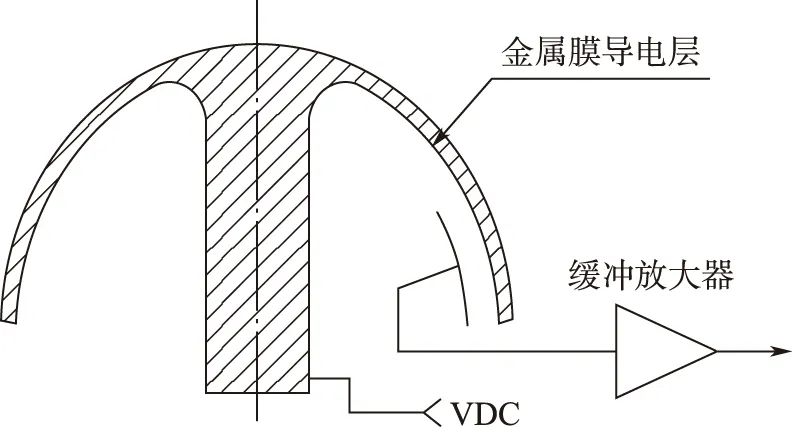
图2 半球谐振陀螺仪信号读出示意图Fig.2 Signal reading diagram of the hemispherical resonantor gyroscope
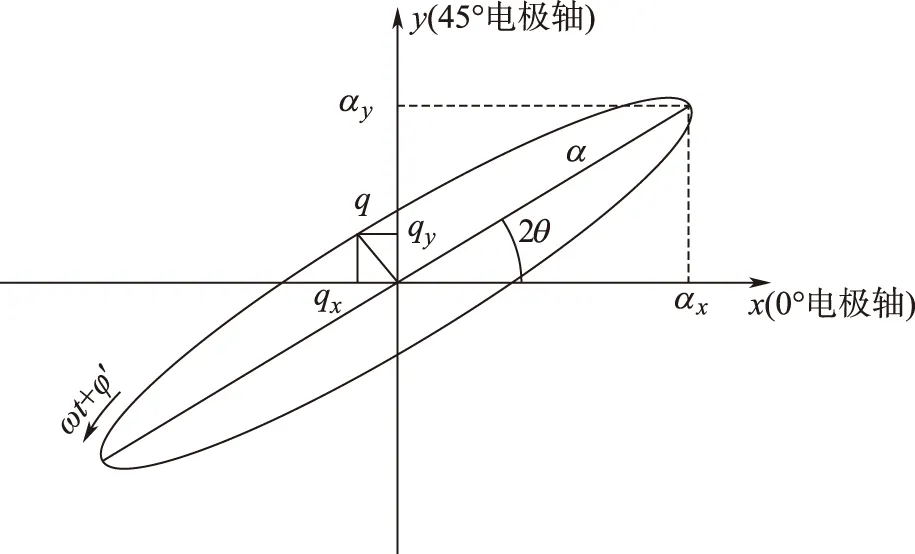
图3 半球谐振陀螺谐振子振动示意图Fig.3 Vibration diagram of the hemispherical resonantor gyroscope chip
1.2 半球谐振陀螺仪的数学模型
半球谐振陀螺的核心部件是由石英材料加工而成谐振子(图3),对其工作时的振型沿0°电极轴和45°电极轴进行正交分解后,运动的数学模型可表示为:
(2)
(3)
式中:x、y分别为0°和45°电极轴上位移;
n为环形波数;
k为进动因子;
Dxx、Dyy分别为谐振子在0°和45°电极轴上的阻尼;
Dxy、Dyx分别为谐振子在0°和45°电极轴上的不对称阻尼;
kxx、kyy分别为谐振子在0°和45°电极轴上的刚度系数;
kxy、kyx分别为谐振子在0°和45°电极轴上的不对称刚度系数;
fx、fy分别为施加在0°和45°电极上的静电力。
在不考虑不对称阻尼及不对称刚度系数的情况下,其数学模型可表示为:
(4)
(5)
以上模型为陀螺表头的简易数学模型,当陀螺处于稳定状态时,可认为节点的振动位移y为0,则可进一步简化为:
(6)
(7)

1.3 温度对陀螺表头的影响
对HRG进行理论推导,解算其参数时,通常用到的与温度变化相关的物理量有:材料密度、薄壁厚度、半径尺寸、杨氏模量和极板间距,这些量的变化会导致谐振子总的刚度和阻尼的变化,从而影响陀螺的输出。目前,对于已经用于卫星型号开展研制工作的HRG,其两个正交方向振动的频率分裂差小于0.003Hz。
利用汉米尔顿原理可求得半球谐振子弯曲振动的谐振频率关系式为
(8)
其中E为杨氏模量,μ为泊桑比,p为密度,h为壁厚,r为半径。假设壁厚h对于温度的影响可以忽略,因而I和J可以看做常量。式(8)对于温度变化量求导,可以得出以下关系。
(9)
目前,已经成熟的HRG,直径为30mm,代入典型值,可以得出以熔融石英材料加工的半球谐振子的振动频率对温度敏感系数大约为0.51Hz/℃,可以看出温度足以对陀螺的谐振频率产生影响。

1.4 温度对V/F零偏的影响
经典的V/F转换电路一般是对正向输入的电压进行频率转换,对于正负输出电压的半球谐振陀螺仪进行V/F转换,常用的方法是在经典V/F转换电路的基础上,对陀螺输出的电压利用精密基准源进行抬升,使负向电压最大值达到0V以上,从而避免对V/F电路的结构进行过多的改造。因为单纯的对于V/F转换电路而言,过多的冗余电路带来的额外干扰因素会更多,如更宽的输入范围会造成分辨率的下降以及非线性、运算放大器输入失调电压的漂移等。本文的V/F转换电路的输入输出关系为
(10)
式中,Ic为恒流源电流值,fclock为电路的工作频率,Vref为零偏电压,Rin为输入电阻,Vin为输入的被测电压,fout为输出脉冲频率。
根据应用背景,选取适当的参数,其输入输出曲线如图4所示。
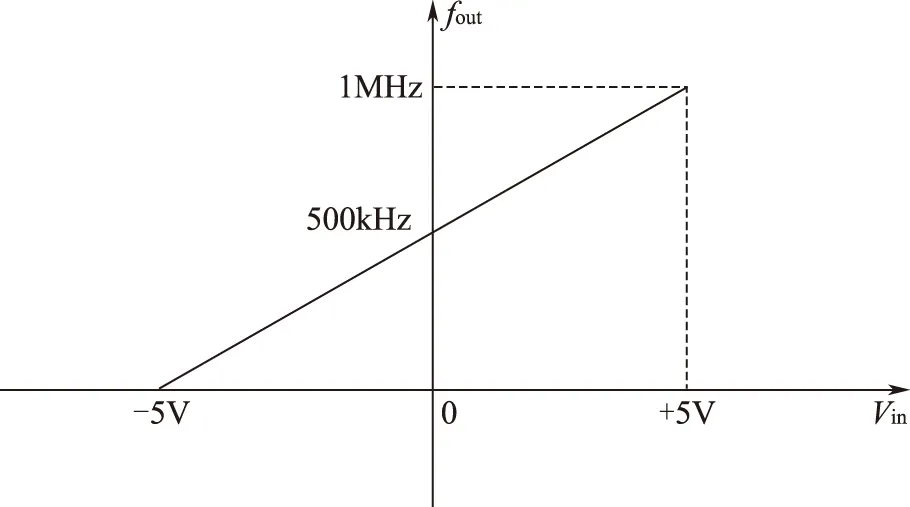
图4 电压频率转换电路的输入输出关系Fig.4 Input-output relations of thevoltage frequency converting circuit
Ln(f0)=LnVref+Ln(fclock)-Ln(Ic)-Ln(Rin)
(11)
根据每个变量的温漂系数及其相关参数,得出了零偏稳定性与温漂系数的关系,如图5所示。由图5不难发现,当任一变量的温漂都会对总的零偏稳定性产生叠加影响时,根据陀螺组合V/F转换电路的工作环境温度,可以选取相应温漂系数的器件,以满足V/F零偏的稳定性要求。

图5 转换电路零偏的稳定性与器件温漂系数的关系Fig.5 Relationship between the zero-bias stabilityof switching circuits and the coefficients of temperature sources of devices
2 解决措施
通过分析不难发现,温度对陀螺表头的影响是由于影响了其石英谐振子的振动状态,进而对信号检测的输出带来了影响。大量的试验表明,温度对陀螺谐振频率的影响是基本线性的,通过软件补偿的方式,可以补偿掉温度剧烈变化时陀螺零偏的剧烈变化。但由于半球谐振陀螺的工艺特性,尤其是陀螺仪谐振子处于真空条件下的热传导特性,导致陀螺仪的输出与温度的变化呈现一定的滞后效应。因此,通过软件补偿的方式,难以将陀螺的零偏稳定性控制在一个合理的范围内。
在陀螺信号传输通道中,最原始的敏感信息源是陀螺表头的石英三件套,如图6所示(剖面图不含读出基座)。由于三件套密封在密封壳体内,与外界进行热量交换的途径主要是读出基座与密封壳体的接触面。不难发现,为保证半球谐振子在恒定的温度场内,最简单的方法是保持密封壳体与石英三件套接触位置的温度相对为恒定值。

图6 石英谐振子的温度传输通道Fig.6 Temperature transmission channel of quartz resonance
另外,通过分析可知V/F输出通道的稳定性跟元器件的温漂系数呈正相关。从电路设计角度进行V/F转换电路的优化,有以下三个途径:1)对于输入电阻的阻值漂移采取正负对称的温漂系数电阻进行线性补偿;2)对于恒流源输出的电流漂移进行线性补偿,可以采用线性的电流传感器等;3)选用精密的温补晶振来提供转换电路的工作频率。
但考虑到元器件的温漂性能跟成本呈指数关系,尤其是以卫星为应用背景的惯性基准,产品的重量、体积、功耗附加的成本尤其重要,因此完全通过选取温漂系数较小的元器件、改善电路的绝对性能来保证陀螺组合输出的稳定,从成本上讲是难以承受的。最实际可行的方案是将对温度敏感的部分布置在一个相对稳定的温度场以内,以减小温度剧烈变化时对输出造成的影响,同时兼顾电路的改进措施。
3 试验验证
根据以上分析,温度是影响陀螺组合输出的零位稳定性指标的最主要外界因素,采取温控措施,将陀螺组合处在恒定的温控环境下,其输出的零偏会趋于稳定,从而改善零偏稳定性指标。在温控精度为±0.1℃的温控系统中,陀螺组合输出的零偏稳定性指标得到了明显的改善,测试结果如图7所示。
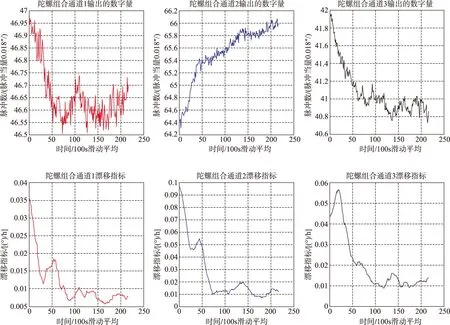
图7 温控前后零偏稳定性测试结果Fig.7 Test results of the zero-bias stability before and after the temperature control
对陀螺组合的输出按100ms采样率进行测试,总共测试6h,前2h无温控,后4h陀螺组合处在温控精度为±0.1℃的温控系统中。对每100s数据进行滑动平均处理,并计算滑动1h的漂移指标。
得出结论,在测试的前2h,由于陀螺组合未开启温控,陀螺组合的输出零位处在单向的缓慢漂移中。而开启温控后,考虑到温度传递表头内部的核心部件所用时间(大约1h)的影响,在最后3h测试中,陀螺组合输出的零位趋向于稳定,漂移指标已接近0.01(°)/h,考虑到陀螺的差异性,通道一的指标已经优于0.008(°)/h。
测试结果表明,通过采取温控后,陀螺组合输出的零偏稳定性得到了大幅度的提升,极大地减小了外界环境温度变化对陀螺输出通道零偏的影响。
另外,也不难得出结论,提高陀螺组合内部的温控精度可以进一步提高陀螺组合的输出零偏稳定性指标。而更高精度的半球谐振陀螺,如漂移指标优于0.003(°)/h,必须改善陀螺敏感器件的制作工艺以及提高陀螺仪的控制电路精度。
4 结论
星载陀螺组合的零偏稳定性将直接影响姿轨控分系统对姿态变化的测量精度。本文对影响半球谐振陀螺组合输出零偏稳定性的因素进行了分析,研究了温度影响输出变化的机理并提出了相应的解决措施。工程实践表明,这些措施以较低的成本有效地提升了半球谐振陀螺组合的零偏稳定性指标。
[1]DavidMRozelle.Thehemisphericalresonatorgyro:Fromwineglasstotheplanets.NASA.
[2] 高胜利.半球谐振陀螺的分析与研究[D].哈尔滨工程大学博士论文,2008.
[3] 叶林.电压-频率转换电路的动态特性分析及求解[J].仪表技术与传感器,2002,(6):41-48.
[4] 周璐.电荷平衡式电压-频率转换器的原理及误差分析[J].测控技术,2009,28(5):87-93.
Research on the Technology of Improving the Zero-bias Stability of theHemispherical Resonator Gyroscope Unit
QI Yi-nan1,ZHAO Hui1,ZHAO Wan-liang2,ZHANG Qiang2
(1.Shanghai Jiao Tong University,Shanghai 200030,China;2.Shanghai Aerospase Control Technology Institute,Shanghai 200233,China)
The stability of the satellite-bone gyroscope combination will directly affect the measurement accuracy of attitude variation tested by an attitude and orbit control system.The factors of output zero-offset stability which affect the hemispherical resonator gyroscope unit are analyzed in this paper,and the mechanism of temperature’s impact on output variation is studied,with the relevant solutions proposed.The engineering practice shows that these measures improve effectively the zero-bias stability of the hemispherical resonator gyroscope unit at lower costs.
Hemispherical resonator gyroscope unit;Zero-bias stability;Error analysis;Temperature control
2015 - 05 - 05;
2015 - 07 - 20。
齐轶楠(1984 - ),男,工程师,主要从事星载惯性敏感器的研究。
E-mail:yinanqi2004@sina.com
V448.22
A
2095-8110(2015)06-0063-06
猜你喜欢
数学年刊A辑(中文版)(2023年4期)2024-01-04 05:47:52
原子与分子物理学报(2020年5期)2020-03-17 06:59:42
中国惯性技术学报(2019年1期)2019-05-21 00:58:54
电子制作(2016年15期)2017-01-15 13:39:06
中国化肥信息(2016年33期)2016-05-17 04:25:43
工业设计(2016年6期)2016-04-17 06:42:53
通信电源技术(2016年4期)2016-04-04 02:57:36
振动、测试与诊断(2014年6期)2014-03-01 01:14:54
常熟理工学院学报(2011年4期)2011-03-20 13:26:27
常熟理工学院学报(2011年4期)2011-03-20 13:26:26
