PLC 冗余设计的风力发电机控制系统
2015-03-04 07:06:16杨杰君易灵芝戴建利
电力系统及其自动化学报 2015年6期
杨杰君,易灵芝,龙 辛,戴建利
(1.智能计算与信息处理教育部重点实验室(湘潭大学信息工程学院),湘潭411105;2.湘电风能有限公司,湘潭 411101)
随着风机大型化时代的到来,兆瓦级风机对控制系统的要求越来越高,特别是系统的可靠性和安全性受到越来越多的关注。冗余技术作为一种提高系统可靠性的方法,它通过增加同等功能模块(如CPU),并按照相应的冗余逻辑使它们同步运行。冗余系统为风机控制系统增加了单故障容错属性,使控制系统不受单一局部故障影响,即使设备在维护或者调整期间也可以全天候连续生产,从而提高系统的可靠性和安全性,避免了由于控制系统出现故障而引起的设备损坏或停产造成的经济损失。
1 PLC 冗余
可编程逻辑控制器PLC(programmablelogiccontroller)冗余可以分为软件冗余和硬件冗余两种[1]。软件冗余是通过软件实现数据的备份、读取以及监测到异常时的自动切换,主控权转移。硬件冗余则是通过增加同等功能的模块通过热备份实现数据同步和主/从切换。
PLC 冗余的硬件结构是基于VxWorks 实时操作系统的PLC 冗余系统结构如图1 所示。两套功能相同的硬件是构成冗余的核心。底板模块、CPU模块、I/O 模块、通信模块等都插在底板插槽上,每个模块都是通过底板电源供电,它们通过各自的底板总线进行通讯。在PLC 正常工作时,两条冗余链路和主备CPU 同时激活,在理想情况下,两条链路各自接收和处理各自链路的实时数据,备用CPU 获得相同的输入值,并通过相同的应用程序计算输出值,但是备用链路不会输出控制信号。集成式自我监控机制可实现故障自动检测。这样,当激活的主链路或主CPU 发生故障后,可以自动进行切换,让备用链路接替其工作。这种硬件冗余方式,CPU 的切换时间达100 ms 以下,且备用链路将重新执行出现故障时的那段任务。这样就能使控制器在切换期间无信号丢失,实现系统的无障碍切换。

图1 PLC 冗余结构图Fig.1 Structure of PLC redundant
2 冗余系统的可靠性指标与分析
冗余系统的可靠性指标主要包括:可靠度(reliability)、平均无故障时间、失效率等。其中:可靠度是指产品在规定时间内,在规定条件下,完成预定功能的能力。即产品在正常工作无故障状态的概率[2]。用R(t)来表示。即R(t)=P(X〉t),它是规定时间的函数,规定时间越长,可靠度越小,且0≤R(t)≤1。用ψ(t)来表示系统的不可靠度,则系统的不可靠度ψ(t)=1-R(t)。
失效率定义为系统或元件工作到某个时间后,在单位时间内发生故障的比率。通常又称为瞬时故障率,用λ(t)表示。
则可靠度与失效率之间的关系为

平均无故障时间MTBF(mean time between failures)是指可边使用边修理的系统、原件或产品在相邻的故障之间能正常工作的时间平均值[3]。通常平均无故障时间又称为产品的平均寿命,产品的平均寿命是一个随机变量,通过对一些同样产品的寿命统计规律的了解,可计算出平均寿命:

根据基于VxWorks 实时操作系统的PLC 硬件冗余的结构及其功能,利用逻辑框图分析法,可以建立PLC 冗余系统的逻辑框图(见图2)。该系统假设是由m 个串联分系统再并联构成(即先串后并),其中只要有一条分路能正常工作时,该系统就能正常工作。每个元件的失效率和可靠度分别为:λ11,λ12,λ13,…,λmnm和R11,R12,R13,…,Rmnm。
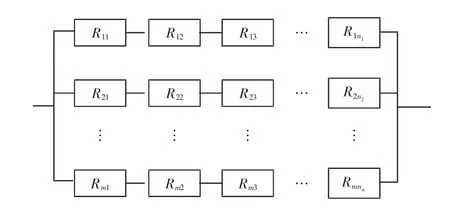
图2 串并冗余系统逻辑框图Fig.2 Logicdiagramofseriesandparallelredundantsystem
根据图2 所示,则第x 条分路的可靠度为

则根据式(4)可将图2 所示的PLC 串并冗余系统逻辑框图逐步简化为图3 所示的等效并联冗余系统逻辑框图。
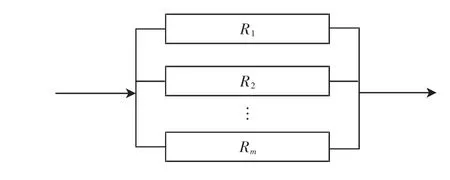
图3 等效并联冗余逻辑框图Fig.3 Logic diagram of equivalent parallel redundant
在图3 的并联冗余系统中,当所有分路全部失效时,系统才会失效。则系统的可靠度为

则根据式(4)和式(5)可推导出串并冗余系统的可靠度为

假设元件的故障是随机出现的,并且假设元件的失效率λ 为常数,则式(6)可以写为

当每个分链路的所用元器件完全相同,相同元器件的失效率λ 都相同时,则各个分链路的失效率也都是相同值,即λ1=λ2=λ3=…=λm,式(7)可以化简成为

由此利用式(3)可计算出整个冗余系统的平均寿命为
由于PLC 硬件冗余是由两条完全相同的链路组成,因此该系统的可靠度为:(2e-λt-e-2λt),平均寿命为发现在添加了冗余控制系统以后,系统的平均寿命比单控制器系统延长了1.5 倍,可靠度则比单控制器系统提高了(2-e-λt)倍。因此冗余系统的可靠性得到了很大提升。
3 PLC 冗余技术在风力发电控制系统中的应用
为提高兆瓦级风力发电机的国产化比率,方便后期维护,并且节约生产成本,增强风机市场竞争力。在遵循IEC61131-3 国际标准的基础上设计出一种兆瓦级风力发电机组的主控系统,该系统以基于PowerPC 处理器和VxWorks 实时操作系统的嵌入式计算机平台为运行环境,以CodeSys 软件为其开发环境,采用了分布式硬件结构,通过以太网总线实现I/O 模块间数据实时交互[4]。
本文利用基于VxWorks 结合CoDeSys 模式设计出的PLC 模块,搭建出一个PLC 冗余系统。在两条相同的底板上都插上了CPU 模块,数字输入输出模块、模拟量输入输出模块、网络通讯模块、以及光纤模块。该系统平台中的2 个控制器分为主CPU 和备用CPU。则先初始化的链路为主站,后启动的为从站。从站上电启动后将运行程序与主站进行同步。主站中的主CPU 将与备用CPU 会进行数据同步,备用CPU 获得相同的输入值。主站CPU的集成式自我监控和外部监控机制可确保对正常运行中的错误或变差做出快速反应[5-8]。PLC 冗余控制器在一个工作周期内将执行图4 所示任务。而在运行过程中,主站不论哪个环节出现故障,PLC都会快速反应,将控制权转移到从站上来。从站在获取控制权后,就可将输出信息输出。
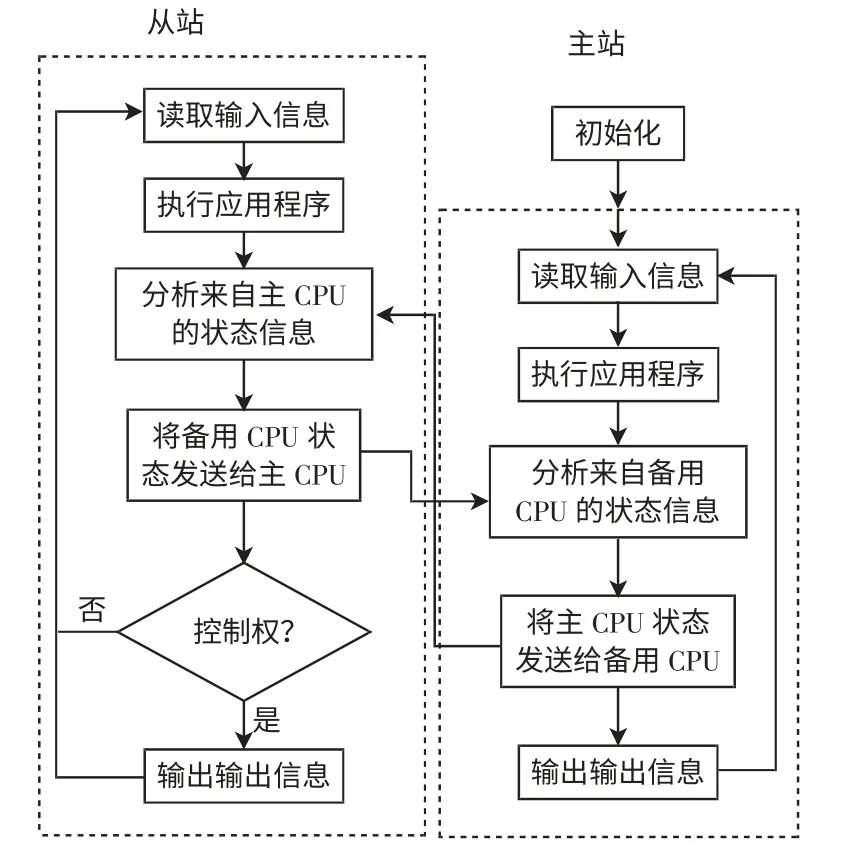
图4 带有冗余功能的PLC 任务周期图Fig.4 PLC task with redundant functions period diagram
利用搭建好的PLC 冗余系统,在主站正常运行PLC 程序,主站所有模块能正常输出数据,输出模块的输出灯点亮(见图5)。将主站CPU 模块,或者主站I/O 模块突然断电,则主站出现故障。从站接受控制权后,从站的I/O 模块正常输出,从站I/O模块输出灯点亮(见图6)。

图5 主站正常工作实物照片Fig.5 Real photo of the main station
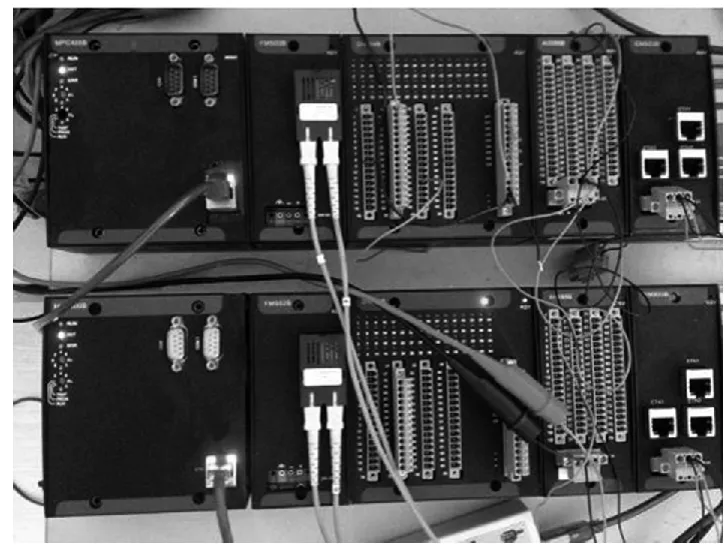
图6 从站工作实物照片Fig.6 Real photo of the slave station
整个系统运行正常,没有出现数据丢失情况。如图7 所示为上位机监测PLC 冗余系统的主站CPU 或I/O 模块断电后模拟输入输出模块AIO(analog input output)输出的电压波形,而图8 所示为单控制器系统CPU 或I/O 模块断电后的AIO 模块输出电压波形。
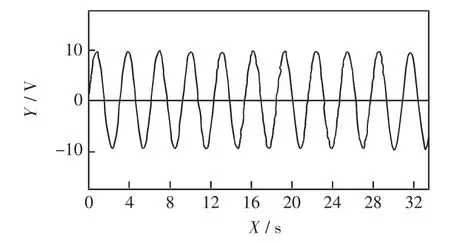
图7 冗余系统AIO 模块输出电压Fig.7 AIO module output voltage of redundant system
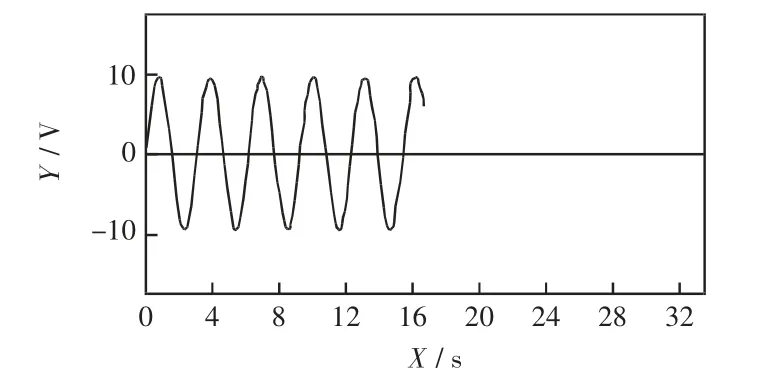
图8 单控制器系统AIO 模块输出电压Fig.8 AIOmoduleoutputvoltageofsingle-controllersystem
另一组实验中,在给CPU 模块断电或者I/O模块断电以后,从上位机观察数字输入输出模块DIO(digital input output)的输出电压波形,图9 所示为PLC 冗余系统DIO 的输出电压,而图10 所示为单控制器系统DIO 的输出电压。
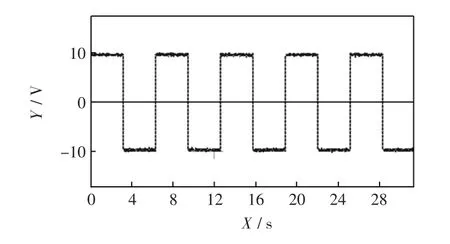
图9 冗余系统DIO 模块输出电压Fig.9 DIO module output voltage of redundant system
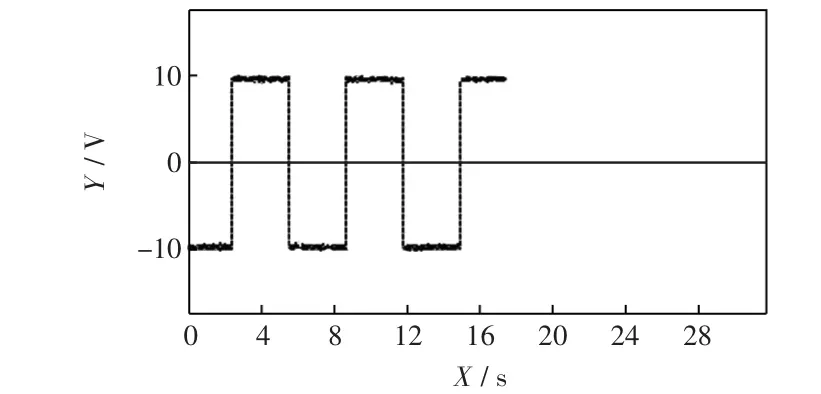
图10 单控制器系统DIO 模块输出电压Fig.10 DIO module output voltage of single-controller system
由以上两个系统的AIO 和DIO 输出电压波形对比可知,PLC 冗余系统主站在CPU 或者I/O 模块断电后,从站能立刻做出响应,接替主站工作,可靠性比单控制系统有了显著提高。由于PLC 冗余系统的平均寿命比单控制器系统延长了1.5 倍,可靠度则比单控制器系统提高了(2-e-λt)倍,因此,风力发电机组在正常工作的情况下,PLC 冗余控制系统能在单条链路出现故障的情况下继续生产,保证了生产效益。
4 结语
PLC 硬件冗余系统提高了整个系统的可靠性,它在风力发电机组上的应用可以降低售后人员的工作强度,显著增强风机控制系统安全可靠性,而且能够明显降低风机因控制系统故障而出现的停机风险,虽然增加了设备费用,但是确保了企业的生产效率,进而获取更大的经济利益。在湘电风能工厂和大雄山风场的PLC 可靠性实验与应用中,添加了冗余链路的PLC,连续工作时间和工作可靠度比单链路控制系统有了显著增加。系统运行平稳,达到了集中监测、分散控制和连续长时间运行的高可靠性要求,证明了PLC 冗余具有很高的实用性。
[1]刘冲,付江梅(Liu Chong,Fu Jiangmei). 双重冗余PLC控制系统的可靠性与可用性研究(Research on reliability and availability of dual redundant PLC control system)[J].自动化仪表(Process Automation Instrumentation),2010,31(9):44-46,53.
[2]张锐,潘泽友(Zhang Rui,Pan Zeyou).冗余技术在分布式控制系统中的应用研究(A study on application of DCS by using redundant technology)[J]. 微计算机信息(Microcomputer Information),2007,23(31):35-37.
[3]单晓明(Shan Xiaoming).双CPU 解析冗余通信控制系统的研究与实现(Research and Implementation of Analytical Redundancy Communication and Control System of Double CPU)[D].西安:西安电子科技大学通信工程学院(Xi'an:College of Communication Engineering of Xi'an Electronic and Science University),2012.
[4]詹俊,龙辛,黄波,等(Zhan Jun,Long Xin,Huang Bo,et al).基于VxWorks 的软PLC 远程监控系统设计与实现(Design and implementation of soft-PLC remote monitoring system based on VxWorks)[J]. 机械工程与自动化(Mechanical Engineering&Automation),2013(3):3-5,8.
[5]许振伟(Xu Zhenwei).开关磁阻电动机的模糊开关角控制(Fuzzy switch angle control mode for switched relucctance motor system)[J].电力系统及其自动化学报(Proceedings of the CSU-EPSA),2010,22(5):62-65,108.
[6]Liu Chong,Zhou Jianliang,Yao Qiuguo,et al. Digital design and reliability analysis of reactor power control system[C]//International Workshop on Intelligent Systems and Applications.Wuhan,China,2009.
[7]Stotsky A,Egardt B.Model-based control of wind turbines:look-ahead approach [J]. Proceedings of the Institution of Mechanical Engineers,2012,226(18):1029-1038.
[8]Ye Yin,Wang Jin. Research and implementation of embedded soft PLC system[C]//Fifth International Conference on Intelligent Networks and Intelligent Systems. Tianjin,China,2012:166-169.
猜你喜欢
纺织科学研究(2023年9期)2023-10-23 11:18:10
化工管理(2023年17期)2023-06-16 05:56:54
数学物理学报(2022年2期)2022-04-26 14:08:46
移动通信(2021年5期)2021-10-25 11:41:48
计算机与数字工程(2019年7期)2019-07-31 09:55:10
电子设计工程(2017年20期)2017-02-10 03:39:04
电子制作(2017年23期)2017-02-02 07:17:07
上海航天(2014年1期)2014-12-31 11:57:26
中国交通信息化(2014年3期)2014-06-05 03:07:09
电测与仪表(2014年18期)2014-04-04 12:33:08