基于SimMechanics的新型3UPU-UPS并联机器人仿真研究
2015-02-24 07:39:44赵元毕长飞
机床与液压 2015年23期
赵元,毕长飞
(1.沈阳工学院信息与控制学院,辽宁抚顺113122;2.辽宁地质工程职业学院机电系,辽宁丹东 118008)
0 前言
并联机构以其特有的高精度、高刚度、承载能力大等优点而成为近年来国内外机器人研究领域的研究热点之一[1-2]。尤其是少自由度并联机构的发明及应用更加速了并联机构的发展。典型的少自由度机构有Hunt提出的3RPS型三自由度空间并联机构,Clavel提出的3自由度纯移动的Delta机构等。
本文作者利用SimMechanics工具箱构建了3UPU并联机器人仿真模型。通过给出动平台轨迹,经逆解模块得到驱动轨迹,并验证了轨迹跟踪特性的好坏,证明该仿真平台所建模型的有效性以及控制器参数的合理性。
1 3UPU/UPS机构分析
3UPU/UPS并联机构机械部分由定平台、动平台、3个驱动支链以及中间约束支链组成。
以定平台中心为基点,3个驱动支链连接点按120°角对称分布,约束支链与上下平台连接铰点均在平台中心。通过液压缸驱动移动副做平移,从而实现动平台沿x、y、z3个方向的平移运动。机构各部分参数见表1。
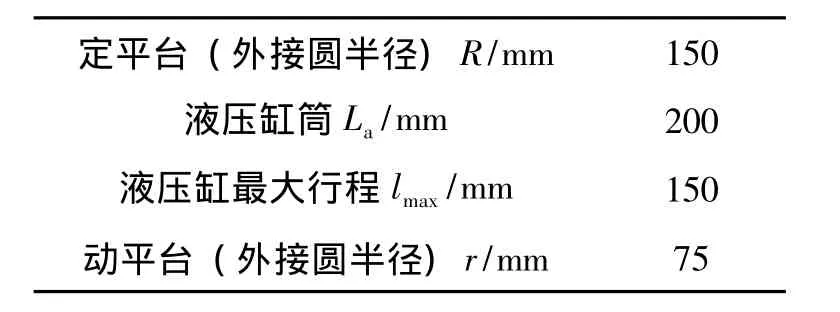
表1 机构参数
1.1 运动学分析
建立如图1所示的空间坐标系。机构上下平台铰链中心点在等边三角形的三个顶点及中心上,且对应边分别平行。基础坐标系O-XYZ建立在固定平台中心点上,相对坐标系O'-X'Y'Z'建立在动平台中心,设末端动平台中心O'(x,y,z)。Ai是第i条支链与基座的连接点,Bi是第i条支链与动平台的连接点,其中i=1,2,3,4。

图1 3-UPU/UPS并联机构简图
根据机构参数可知固定平台3个顶点在基础坐标系O-XYZ中的坐标分别为:
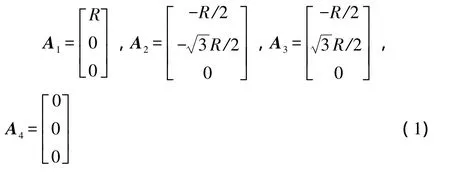
动平台的3个顶点在相对坐标系O'-X'Y'Z'中的坐标分别为:

由于3UPU/UPS并联机器人的运动为三个平动,故O'-X'Y'Z'相对O-XYZ的齐次变换矩阵为:

其中 (x,y,z)为O'在基础坐标系O-XYZ中的坐标。
根据坐标变换理论,动平台3个顶点在基础坐标系中的坐标可表示为:

其中为B1,B2,B3,B4在基础坐标系下的坐标。将式 (2)代入式 (4)中可得:


以上式 (6)— (8)可写成:

其中q=[xyz]T是位姿向量。
由此得到该并联机构逆解,将其在MATLAB中编程,保存在Trajectory Generator模块中。
1.2 动力学分析
拉格朗日方程:

其中τi是作用在某自由度方向上的假想力。将式(7)代入式 (8)得:

各关节虚功

动平台的虚功:

按虚功原理有:

将式 (13)—(15)代入式 (16)得3UPU/UPS并联机器人的动力学方程:

2 构建SimMechanics模型
SimMechanics立足于Simulink之上,是进行控制器和对象系统跨领域/学科的研究分析环境。它提供了大量对应实际系统的元件,如:刚体、铰链、约束、坐标系统、作动器和传感器等。可以实现机械构件、铰接点、约束、传感器、驱动器等组成部分的建模与仿真[4-5]。SimMechanics还可连接 Simulink 环境下建立的控制系统模型,体现面向对象的建模方法和方块图建模方法的紧密结合,提供了机电一体化产品建模与仿真的有效环境[6]。
2.1 构建3-UPU-UPS并联机器人的SimMechanics模型
图2即为3UPU/UPS并联机器人SimMechanics模型,该模型主要由以下几部分组成:驱动子系统Motion Generater,静平台 Plantform1,动平台 Plantform2,三个驱动支链与一个约束链。其中静平台通过通过无自由度模块与大地模块相固连,上平台中心与一个Body Sensor相连,通过该模块采集到的位置数据传递到MATLAB工作空间中,以便用户查看动平台的中心运动轨迹[7]。

图2 3-UPU-UPS并联机器人SimMechanics模型
驱动子系统Motion Generater具体情况如图3所示,该子系统包括轨迹产生模块,以及根据运动反解建立的Fcn模块,通过该子系统可以根据用户给定的轨迹反解驱动支链的位置、速度、加速度、以此来驱动移动副进行运动。

图3 驱动子系统Motion Generater
四条支链模块由三条驱动支链与一条约束支链组成,其详细结构见图4与图5。三条驱动支链均是UPU结构,其中Join Actuator为激励信号输入模块,Join Sensor为关节传感器,可以为用户提供位置,速度,加速度等信息[8]。约束支链不含驱动,只提供约束,为UPS结构。
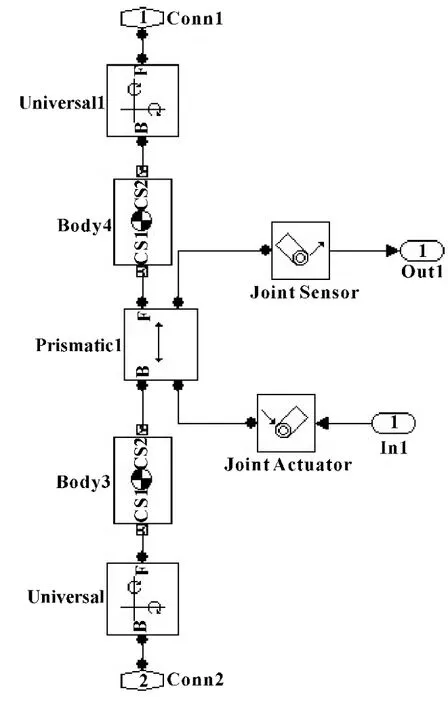
图4 驱动支链

图5 约束支链
2.2 模型仿真
仿真给出的期望的平台的期望轨迹为螺旋线[9-11],其表达式为:
x=15(1+cost)
y=15sint
z=150+2t
动平台中心螺旋线经逆解模块转换为3个驱动支链的运动激励信号 (位置、速度、加速度)[12]。设置相关参数后进行仿真。图6为3-UPU-UPS并联机器人仿真模型,图7为得到的动平台中心位置 (x,y,z)所绘制出的运动轨迹,结果表明该运动轨迹与规划轨迹一致,证明该模型以及运动学逆解模块的正确性。

图6 3UPU/UPS并联机器人仿真模型
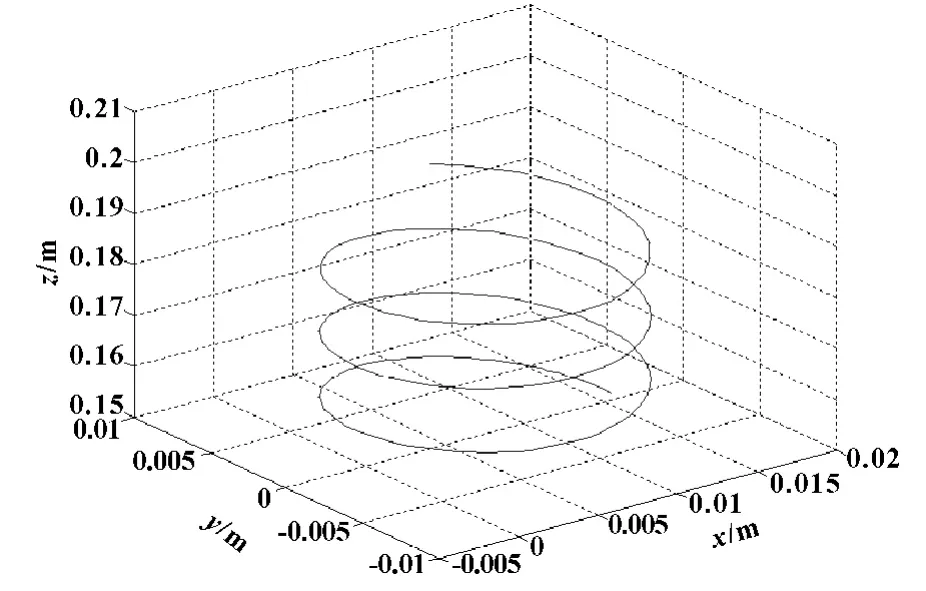
图7 动平台中心运动轨迹
3 结束语
在对3UPU/UPS并联机器人运动学及动力学分析基础之上,采用SimMechanics模块设计了该并联机器人的运动仿真控制平台,并对各个模块进行了详细的解释说明,最后给出了动平台规划轨迹,进行了仿真验证,结果表明该模型以及求解模块均符合实际情况。
[1]孙小勇,谢志江,蹇开林,等.6-PSS柔性并联机器人动力学分析与仿真[J].农业机械学报,2012,43(7):194-199.
[2]刘善增,余跃庆,佀国宁,等.3自由度并联机器人的运动学与动力学分析[J].机械工程学报,2009,45(8):12-17.
[3]丁度坤,谢存禧,胡选子,等.高速运动机器人动力学分析与研究[J].机械设计与制造,2012(1):161-163.
[4]王英波,黄其涛,郑书涛,等.Simulink和SimMechanics环境下并联机器人动力学建模与分析[J].哈尔滨工程大学学报,2012(1):100-105.
[5]李志斌,董旭明,钟德永.基于SimMechanics的三自由度并联机器人仿真[J].工业控制计算机,2012,25(8):88-91.
[6]薛定宇,陈阳泉.基于MATLAB/Simulink的系统仿真技术与应用[M].北京:清华大学出版社,2002.
[7]高道祥,薛定宇.基于MATLAB/Simulink机器人鲁棒自适应控制系统仿真研究[J].系统仿真学报,2006(7):2022-2025.
[8]于凌涛,张楠,张立勋,等.3-RPS并联机器人静力学研究及SimMechanics仿真[J].哈尔滨工程大学学报,2010(8):1061-1064,1086.
[9]石磊,金忠全.四自由度机器人的建模和仿真[J].组合机床与自动化加工技术,2012(3):37-39.
[10]孙坚,丁永生,郝矿荣.基于SimMechanics的新型并联机构仿真平台[J].计算机仿真,2010(1):181-184,196.
[11]王鲁敏,李艳文.基于Matlab的教学型机器人空间运动轨迹仿真[J].机械与电子,2005(9):55-57.
[12]胡峰,骆德渊,雷霆,等.基于 Simulink/SimMechanics的三自由度并联机器人控制系统仿真[J].自动化与仪器仪表,2012(5):221-223.
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22 07:26:40
中学生数理化·七年级数学人教版(2018年4期)2018-06-28 03:26:28
数学大世界(2018年1期)2018-04-12 05:39:03
中等数学(2017年2期)2017-06-01 12:21:50
中国环境监察(2016年7期)2016-10-23 05:36:30
通信电源技术(2016年1期)2016-04-16 04:57:26
通信电源技术(2016年5期)2016-03-22 01:09:37
实用手外科杂志(2015年2期)2015-08-28 09:50:56
饲料博览(2015年4期)2015-04-05 10:34:14
北京航空航天大学学报(2014年1期)2014-12-19 08:58:38