
车联网通信技术发展现状及趋势研究*
2015-02-24 03:22任开明李纪舟刘玲艳宋文颖
通信技术 2015年5期
任开明,李纪舟,刘玲艳,宋文颖
(1.中国电子科技集团公司第30研究所,四川 成都 610041;2.解放军91746部队,北京 102206)
车联网通信技术发展现状及趋势研究*
任开明1,李纪舟2,刘玲艳2,宋文颖2
(1.中国电子科技集团公司第30研究所,四川 成都 610041;2.解放军91746部队,北京 102206)
随着移动互联网、物联网和无线传感器网络技术的广泛应用,车联网成为实现未来智能交通目标的有效途径之一。通信技术是车联网的关键核心技术,决定着车联网的整体性能。首先介绍了车联网的概念、体系架构和特点优势,接着重点阐述了车联网的通信类别、通信体系、通信标准、路由协议和通信安全技术的发展现状;然后分析了车联网通信技术发展面临的问题,最后根据物联网、移动互联网的发展趋势,对车联网通信技术的发展进行了展望。
车联网;通信技术;路由协议;通信标准
0 引 言
随着移动互联网、物联网和无线传感器网络技术的广泛应用,车联网日益成为实现未来智能交通的有效途径之一,是当前全球研究和关注的焦点。通信技术作为车联网的基础,决定着车联网的整体性能,是车联网的关键支撑技术。
1 车联网技术
1.1 概念内涵
车联网到目前并没有统一的定义,人们从不同的角度,对其有几种不同的描述[1-2]:一是站在信息感知技术的角度,车联网是指车辆上的电子标签通过RFID等无线射频识别技术,实现对车辆的属性、静态和动态信息进行提取和有效利用,并对车辆运行状态进行有效的监管和提供综合性的服务。二是站在智能交通技术的角度,车联网是指将先进的信息感知技术、传输技术、信息控制技术及信息处理技术等运用于交通管理系统而建立的实时、准确、高效的综合交通运输信息处理系统。三是站在车辆组网和通信技术角度,车联网是由安装无线通信终端的移动车辆组成,车辆能够接入到异构或同构的网络之中,用于完成车与车之间、车与路边设施之间的通信。上述不同的描述都有一个基本的共识,即车联网是利用先进的信息和网络技术,将车辆、行人、道路和路边设施等集成为一个有机的信息系统,以提供车辆安全、交通控制、综合信息和互联网接入等服务,进而实现提高交通效率和降低交通事故的目的[1]。
综合上述几种不同的描述,车联网的定义是指,利用车辆电子传感设备,通过无线通信技术、汽车导航系统、智能终端设施和信息处理系统,使车与车、车与人、车与交通设施之间进行双向数据交换与共享,实现对车、人、物、路等状况的实时监控、科学调度和有效管理,进而改善道路运输状况、提高交通管理效率的综合性智能决策信息系统。车联网是传统的智能交通系统与物联网融合发展的产物,是一种特殊的无线传感器网络。
1.2 体系架构
车联网是物联网在交通领域中的具体实现,具有明显的物联网属性,是互联网的延伸[2]。其体系架构与物联网有许多共同之处,分为感知层、网络层、应用层等3个部分[3],如图1所示。
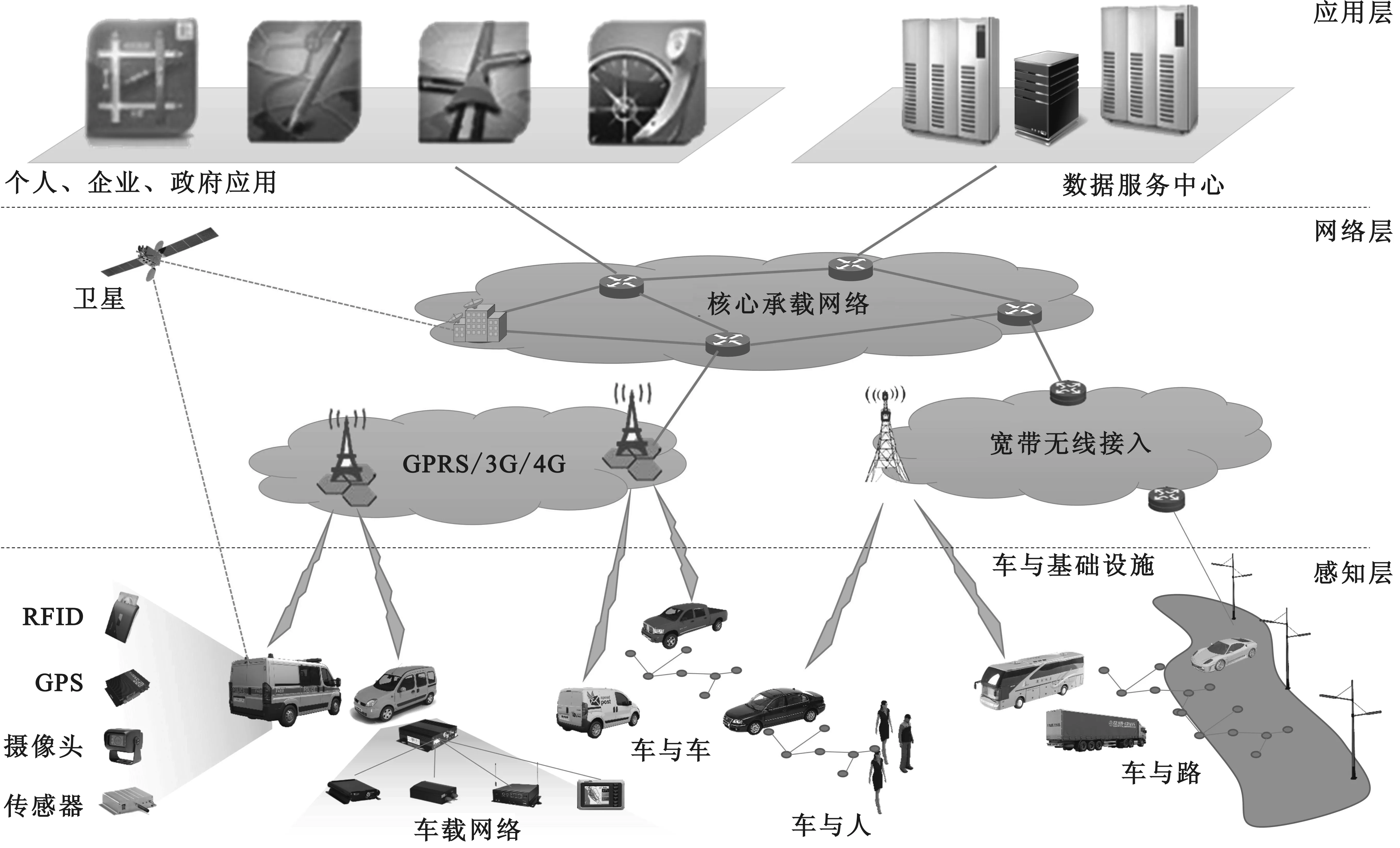
图1 车联网体系架构
感知层。负责车辆自身与交通信息的感知与采集,通过无线射频识别、无线传感器网络、导航定位等技术,实时地感知和采集车辆运行状况、交通运控状态、道路周边环境、天气变化情况,以及车与车、车与人、车与道路基础设施之间的位置等信息,为应用层提供全面、原始的信息采集服务。
网络层。负责整合感知层获取的数据,为应用层提供信息传输服务,实现远距离通信和远程控制的目的。网络层主要包括承载网络和接入网络两部分,其中,承载网络主要包括电信网、互联网(下一代互联网)、广电网、交通信息专用网络等。接入网络包括2G/3G/4G等无线移动通信网络,或WLAN、WiMAX、RFID、卫星通信等网络。
应用层。负责实现人机交互通信功能,通过车载信息系统,获取交通信息、汽车状况和互联网信息,实现智能交通管理、车辆安全控制、交通信息发布等功能,为个人、企业、政府提供应用服务。
1.3 特点优势
车联网相对于传统的移动互联网或物联网而言,有其自身独有的特点和优势[4]:一是网络结构呈现动态拓扑。高速移动的车辆节点使得车联网的拓扑结构快速变化,接入方式也会因环境改变而动态变化。二是能量和存储空间充足。车联网中的通信节点是车辆,具有足够的存储空间和数据处理能力,以及不间断的续航能力。三是车辆移动轨迹可预测。车辆的移动遵循于已经建好的道路,只要获取车辆的速度和道路地图,车辆的运行状态在一定时间内就可以被预测。四是应用场景具有多样化。车联网的应用广泛,可提供车辆安全、道路维护、交通监控、生活娱乐、移动互联网接入等服务[5-6]。五是通信的实时性和可靠性要求强。车联网中的车辆运行速度快,要求节点之间通信的实时性和可靠性高。
2 车联网通信技术发展现状
2.1 通信架构
车联网的通信架构如图2所示,包括移动部分和基础设施,其中移动部分以车辆为载体,构成一种特殊的移动无线传感器网络,分为车载局域网(VAN)和车载自组网(VANET)两类。基础设施由公共接入网络和承载网络组成,为快速移动的车辆提供网络接入和各种应用服务。
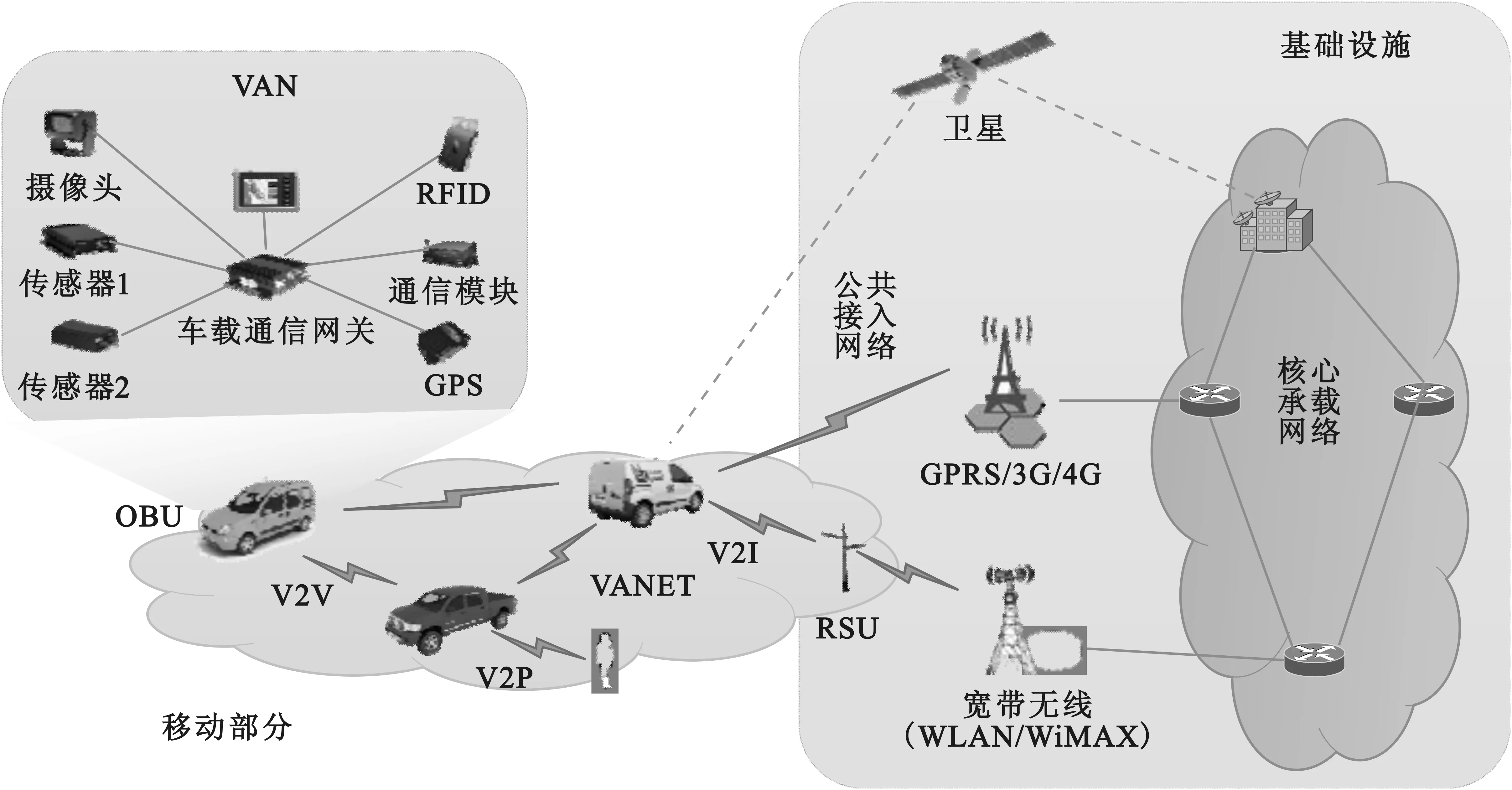
图2 车联网通信架构
车载局域网(VAN)又称车域网,是建立于车辆内部的局域网络,用于实现车内传感器模块、定位模块、通信模块(V2V、V2I)、显示模块等设施 (设备)之间的信息交换和共享。车辆内部设施(设备)统称为车载单元(OBU),当OBU需要与外界进行通信时,可通过车载通信网关以WiMAX、蜂窝通信、WLAN及卫星通信等手段接入路边单元(RSU)的道路基础设施或公共接入网络。
车载自组网(VANET)是一种专门用于交通环境下的移动自组织网络。其中,车辆被虚拟成移动的网络节点,而道路周边的RSU被虚拟成静止的网络节点,通过车辆和RSU内的传感器,来采集道路及车辆周边的环境信息。目前的VANET主要有“车与车通信(V2V)”和“车与道路基础设施通信(V2I)”两种模式,其中V2V模式能让车辆实时感知自身周边其他车辆的运行状况,为交通管理和智能驾驶提供安全服务。V2I模式用于OBU与RSU之间的通信,其中,OBU采集到的实时交通信息通过RSU汇集到交通控制中心,可对交通运行状况进行实时监控和管理,而交通控制中心则通过RSU实现对车辆的实时定位跟踪、收费管理和交通信息发布等服务。
2.2 通信分类
车联网中涉及的通信技术众多,依据通信对象不同,大致可分为:车内通信、车与车通信、车与人通信、车与路通信,以及车与交通控制中心之间的通信等5类[7]。
2.2.1 车辆内部通信
车内通信,即汽车内部的信息传输,是指车载终端设施与车内的传感器和信息控制设施之间相互连接所形成的车辆自身通信网络,用于采集车辆数据,并根据交通控制中心的指令对车辆运行状况进行管控,为车辆检测、车辆系统控制、辅助驾驶等提供支撑。车辆内部是一个相对静止的环境,采用的通信技术主要包括CAN、Bluetooth、LIN、MOST、FlexRay等,属于车内短距离有/无线通信,具有实时性强、可靠性高、通信距离短等特点。
2.2.2 车与车通信
车与车通信,即通过车载终端进行的车与车之间的通信,主要用于车辆之间的双向数据传输,采用的通信技术包括微波、红外技术、专用短程通信等,具有安全性、实时性要求高的特点。车载终端可实时采集周边车辆的速度、位置、方向、车辆运行告警等信息,车与车之间通过无线通信技术构成了一个互动的交流平台,可以实时交换图片、短信、视频和音频等信息。
2.2.3 车与人通信
车与人通信,是指人使用移动电子设备,如便携式电脑、智能手机或其他手持设备(如多功能读卡器、电子钥匙等)与车载电子设备之间进行的通信,采用的通信技术包括RFID、BlueTooth等,主要应用于车辆信息管理、信息服务及智能钥匙等。
2.2.4 车与路通信
车与路通信,是指车载电子设备与周边道路设备,如交通摄像头、红绿灯、路边单元(RSU)等进行的通信,通过周边道路设施可以感知获取车辆周边的车辆信息,并发布实时的交通或求助信息,实现车辆和基础设施之间智能协同与配合[8]。车与路通信主要应用于实时的信息服务、车辆的运行监控、电子收费的管理等,通信特点是距离较短、高速移动,主要通信技术包括微波通信、红外通信、专用短程通信等。
2.2.5 车与控制中心通信
车与控制中心通信,是指车载移动终端通过公共接入网络与远程的交通控制中心建立互通互联,进行双向数据传输和信息交换,实现车辆和交通控制中心之间的数据交互、数据存储和数据处理,主要应用于车辆导航、车辆远程监控、紧急救援、信息娱乐服务等,具有距离远、高速移动的特点,主要通信技术包括GSM、GPRS、2G/3G/4G、GPS、卫星等。
2.3 通信标准
车联网通信还没有统一的标准,各个国家或产业联盟根据自身的发展,对车联网的通信提出了相关需求。美国提出的车联网通信技术需求主要包括[9]:①网络接入时间短;②传输时延低,一般要求在100 ms左右;③传输可靠性高。车与车通信数据包在100字节内,车与路通信的数据包在340字节内;④信息安全性高和个人隐私得到保护;⑤通信范围有限(传输距离在50~500 m),频谱的利用率高,具有低干扰功能;⑥具有足够的通信带宽保障等。欧盟、日本等全球车联网研究组织,也在802.11、GSM、UMTS、3G等通信技术基础上提出了相关标准。目前,比较有影响的车联网通信标准主要有专用短距离通信(DSRC)标准、IEEE802.11p标准和IEEE1609系列标准[3]。
2.3.1 DSRC标准
专用短距离通信协议(DSRC)是一种专门用于车辆与车辆(V2V)和车辆与道路基础设施(V2I)之间的通信标准,其优点是数据的传输速率高、时延短,支持点对点或点对多点通信,广泛地应用在不停车收费、出入控制、车队管理、信息服务等领域。DSRC标准最早由美国材料与试验协会(ASTM) 于1992年提出,通信频段为915 MHz,通信覆盖距离为30 m,数据传输速率达为0.5 Mbit/s。ASTM于2002年和2003年分别发布了E2213-02 DSRC和E2203-03 DSRC标准,通信频段为5.9 GHz,通信覆盖距离为1 000 m,数据传输速率为6~27 Mbit/s。1997年,欧洲的CEN/TC278工作组发布了ENV12253 DSRC物理层和ENV12795 DSRC数据链路层标准,使用的频段是5.8 GHz。2001年和2004年,日本的TC204工作小组分别发布了ARIB STD-T75和ARIB STD-T88标准,通信频段是700 MHz。但到目前为止,欧洲的标准与美国、日本采用的制式,频段和调制方式等都不同,还没有形成统一明确的国际标准。
2.3.2 IEEE802.11p标准
为了促进DSRC的标准化和产业化,IEEE组织2004年成立了车辆无线接入(WAVE) 工作组,负责研究美国ASTM制定的5.9 GHz频段DSRC标准,并对其进行升级完善,设计制定统一的、全球通用的车联网通信标准。2010年7月,IEEE的WAVE工作组正式发布了IEEE802.11p车联网通信标准。
IEEE802.11p通信标准是对无线局域网IEEE802.11标准的扩展和补充,适用于V2V和V2I之间的通信,引入了先进的数据传输、移动互联、通信安全和身份认证等机制。IEEE802.11p通信标准对DSRC标准中的物理层(PHY)和介质访问控制层(MAC)的内容进行了规范。其中,物理层沿用了IEEE802.11a标准中的正交频分复用(OFDM)技术,用以降低因多径衰落和多普勒频移所造成的码间干扰,其采用5.850~5.925 GHz频段,工作频段跨度75 MHz,并将其划分为7个带宽为10 MHz的子信道,其中1个控制信道(CCH)负责安全消息的传输,6个服务信道(SCH)负责非安全消息的传输;MAC层协议仍采用IEEE802.11标准的CSMA/CA(Carrier Sense Multiple Access with Collision Avoidance),但对实体管理、介质访问控制方式和接入优先级等方面做了升级改善[10]。
2.3.3 IEEE1609标准
IEEE1609系列标准是为了完善DSRC标准的应用层功能而提出的,是以IEEE802.11p标准为基础的高层系列标准,目前共有四个标准:
IEEE 1609.1标准提供资源管理,规范了远程应用和资源管理间的控制互换流程,让具有控制能力的节点能对一个区域内的所有节点实现远程控制,并为DSRC设备提供了可扩展性和管理机制。
IEEE 1609.2标准提供安全服务,即为车联网应用和信息管理提供安全保障机制,如防范信道窃听、电子欺诈和入侵攻击等。
IEEE 1609.3标准提供网络层的通信协议及管理机制,缩小信息在网络设备间的传输时延。
IEEE 1609.4标准主要用于多信道的协调通信,通过控制信道协调其他6个服务信道的网络设备之间交换信息。
2.4 路由协议
路由协议是通信技术的基础,决定着车联网的组网通信能力。目前研究的车联网通信路由协议主要分为以下3种类型[3]。
2.4.1 按需路由协议
按需路由协议又称作被动型路由协议,是依据数据发送请求,从源节点到目的节点被动地搜索最佳路由,在数据发送结束或没有数据发送时,通信节点不必维护路由表。其优点是能降低网络的开销,提高网络的吞吐量;缺点是具有许多不确定性,并且可靠性和安全性较低,仅适用于节点移动速率低、规模小、安全性要求较低的网络环境。
2.4.2 分层路由协议
根据网络结构可将路由协议分为平面路由和分层路由协议[11]。其中,平面路由协议不适合用于车联网,而分层路由协议采用了簇的机制,能对移动节点进行分层管理,其思路是将一定范围内的相邻节点组成一个簇,每个簇设置一个簇首,簇与簇之间利用各自的网关节点实现通信,由簇首和网关构成高层的虚拟骨干网。目前,研究的分层路由协议有CBRP、CL-DSR和AOW协议[12-14]。分层路由协议的优点是扩展性好,比较适用于规模大、节点多的网络环境,能实现对移动节点的有效管理。
2.4.3 地理位置辅助路由协议
根据是否应用了地理位置信息,网络路由协议可分为地理位置辅助路由协议和非地理位置辅助路由协议。其中,非地理位置辅助路由协议需要有路由表的支持,不适合用于车联网中。地理位置辅助路由协议是车联网路由协议的重点研究方向,有贪婪路由协议和锚路由协议2种类型。
(1)贪婪路由。贪婪算法是一个解决最优化问题的近似方法。2000年,Brad Karp等人提出了GPSR协议[14],将贪婪算法与地理位置信息相结合,并应用到车联网感知层的路由协议中。该协议的基本思路是:一个节点周期性地播发含有自身身份标识和当前实时地理位置坐标的数据报文,其他节点接收到数据报文后,进行分析并做出相应的参数设置,进而建立起邻节点列表。然后,当某个节点要发送数据时,首先查找邻节点列表,确定出到达目的节点的最近直联相邻节点,再将数据发送给该节点。而接收到数据的节点,以同样的方式选择下一个直联邻节点,直到数据到达目的节点为止。贪婪路由协议省略了路由选择的穷举过程,具有较高的效率。2008年,Kevin C Lee等人在GPSR协议贪婪路由算法的基础上,提出了LOUVER协议[15],引入了车辆自主感知车辆密度的方法来辅助路由选择,拓展了贪婪路由协议的功能。
(2)锚路由协议。其基本思路是,根据交通网络的分布规律和在时间上的相对稳定性,将道路交通的拓扑结构信息引入到路由选择中。2003年,Christian Lochert等人提出了GSR协议[16],将源节点到目的节点之间的道路十字路口设定为锚节点序列,在两个锚节点之间仍使用贪婪算法来确定路由,让信息沿着道路拓扑结构进行传输,进而降低了交通环境对通信质量的干扰。
3 车联网通信技术发展面临的问题
车联网技术正处于发展的初级阶段,其通信技术的发展面临着如下的问题[3,17]:
3.1 标准协议不完善
一是标准协议不健全。目前研究的标准协议大都用于解决车与车、车与基础设施的通信,而车与人、车与控制中心的通信标准还不多。二是标准还不完善。比如IEEE802.1lp协议还处于起步阶段,还需修正完善 。三是还没有形成一个成熟的、统一的国际标准。目前的标准协议都是各国或者产业联盟提出的,没有形成国际认可的统一标准协议。四是与互联网协议的转换问题。为了安全自主,目前的车联网没有直接采用TCP/IP协议,车联网接入互联网是未来的发展趋势,将面临着协议转换问题。
3.2 异构网络需融合
车联网中存在多种不同的无线通信网络,包括无线局域网(WLAN)、全球微波互联接入(WIMAX)、超宽带通信(UWB)、2G/3G蜂窝通信、4G LTE、卫星通信以及各种传感器网络等,要想使这些不同结构的网络互通互联,进行数据传输交换,实现信息共享,必须解决不同异构网络之间的融合问题。
3.3 信息处理要求高
车联网的规模大,接入的节点多,提供的业务类型多,通信系统的感知层所采集的人、车、路边设施等方面的信息量非常巨大,加之车辆行驶的速度快,路况信息复杂多变,如果不能对这些大量的数据进行及时、有效的处理和利用,将会迅速地被新产生的信息所湮没,这就要求车联网的信息处理速度快、时效性高。
3.4 通信安全有隐患
一是车联网是物联网的延伸和发展,物联网中的通信安全问题也给车联网带来隐患。二是车联网中的数据传输协议还没有统一的标准,还无法制定统一的通信安全措施。三是车联网中节点数量多,容易造成无线网络拥塞。四是车辆的高速行驶,需要车辆节点与感知信息采集节点之间进行不断的切换,给密钥管理和身份认证带来困难等。
4 车联网通信技术发展趋势
针对车联网通信技术面临的问题,根据物联网、移动互联网的发展趋势,预计车联网通信技术将向如下几个方面发展[3,17,18]:
4.1 完善通信标准协议
一是制定新的通信标准协议为车与人通信、车内通信和车与控制中心通信提供规范。二是完善已有的标准协议,如对IEEE802.11p标准、IEEE1609标准进行修订完善,提供更多服务功能。三是建立统一的国际标准,在各个国家和产业联盟现有的车联网通信标准基础上,由国际权威通信组织牵头,制定颁发统一的车联网国际通信标准[19]。
4.2 深化异构网络融合
随着物联网、移动互联网的快速发展,车联网的规模将越来越大,接入网络的车辆节点和路边单元节点也越来越多,引入的网络结构多种多样,将形成不同网络结构共存的局面,影响车联网内各子网络之间的信息共享和数据互联,需要深化异构网络的融合集成,实现信息的无缝交换。因此,车联网通信技术的发展必须为未来异构无线网络的融合提供支撑。同时,车联网最终要与互联网融为一体,需要加强协议转换技术研究,使车联网与互联网的数据实现无缝切换。
4.3 提高通信容量和速率
随着全球车辆保有量的不断升高、车联网产业的不断壮大,接入车联网的车辆规模将不断扩大,车联网需要采集、传输、处理、分析的数据量将指数级增长,呈现出大数据的特征,如果不能对车联网中的大规模数据进行及时有效的处理、挖掘,将会严重影响车联网业务的正常运行。通信速率和通信带宽对车联网的信息处理能力有重要的作用,因此,充分运用云计算、大数据技术,研发大容量、高速率的通信产品或技术,将是车联网的重点发展方向之一。
4.4 研发通信安全技术
车联网是一个开放的动态网络,面临着多种多样的通信安全问题,确保车联网的通信安全和个人隐私安全将是未来的研究重点。一是要加强密钥管理技术的研发。密钥管理是数据加密技术中的重要环节,是确保车联网通信安全的关键技术。二是要加强身份认证技术的研发,保证合法车辆用户的接入,确保通信的真实性和有效性。三是要加强通信抗干扰技术研发,消除城市复杂环境所带来的电磁干扰问题和车辆高速行驶所带来的多径衰落等问题。
5 结 语
车联网是未来智能交通的发展方向,通信技术是车联网技术的关键支撑,决定了车联网信息传输的实时性和有效性。车联网目前还处在不断演进的阶段,各种应用相对独立,不能完全体现车联网的特性,只能反映车联网发展的一个趋势,其通信技术也面临着较多的问题,随着移动互联网、物联网技术的广泛应用,特别是大数据、云计算、无线通信技术的快速发展,将给车联网通信技术的发展带来新的动力。
[1] 孙小红. 车联网的关键技术及应用研究[J]. 通信技术,2013,46(04):47-50. SUN Xiao-hong. Key Technology and Its Application of IoV[J]. Communications Technology, 2013, 46(04):47-50.
[2] XU Q,Mark T,Ko J,etal.Vehicle-to-Vehicle Safety Messaging in DSRC[C]//Proceedings of the 1st ACM International Workshop on Vehicular Ad Hoc Networks,Philadelphia: ACM,2004:19-28.
[3] 王群,钱焕延.车联网体系结构及感知层关键技术研究[J].电信科学,2012,12(12):1-9. WANG Qun,QIAN Huan-yan. Architecture and Key Technologies for Internet of Vehicles[J]. Telecommunications Science, 2012, 12(12):1-9.
[4] 徐婷,王新红,王平.车联网中基于多优先级的自适应动态路由协议[J]. 通信技术,2014,47(02):163-166. XU Ting,WANG Xin-hong,WANG Ping. Multi-Priority Dymamic Adaptive Routing Protocol for VANET[J]. Communications Technology, 2014, 47(02):163-166.
[5] A.GOEL, V.GRUHN. Integration of Telematics for Efficient Management of Carrier Operations[C],IEEE International Conference on e-Business Engineering,2005.ICEBE 2005,404-408
[6] David S,Breed. Telematics System for Vehicle Diagnostics. United States Patent.Patent number: 6738697.189-210.
[7] 孟源,柴舒杨,罗正华等.车联网网络架构分析[J].成都大学学报:自然科学版,2012,31(04):346-349. MENG Yuan, CHAI Shu-yang, LUO Zhen-hua,et al. Analysis of Network Architecture of Internet of Vehicles [J]. Journal of Chengdu University (Natural Science Edition, 2012, 31(04):346-349.
[8] Hewer T D,Nekovee M.Congestion Reduction Using Ad-Hoc Message Dissemination in Vehicular Networks[C].The First International ICST Conference on Communications Infrastructure,Systems and Applications in Europe,2009: 128-139.
[9] 王建昱. V2X车联网及其关键技术[J]. 信息技术与信息化,2013(05):60-64. WANG Jian-yu. V2X VANET and Key Technology[J]. Information Technology and Informatization, 2013(05):60-64.
[9] IEEESTD.2010.5514475. IEEE Standard for Information Technology-Telecommunications and Information Exchange between Systems-Local and Metropolitan Area Networks-Specific Requirements Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications Amendment 6: Wireless Access in Vehicular Environments, July 2010.
[10] Wahid N,Luiz A S,Denis T.Adaptive Approaches for Efficient Parallel Algorithms on Cluster-based Systems. International Journal of Grid and Utility Computing,2009,1(2):98-108.
[11] Yu T Y,Chong P H J,Zhang M.Performance of Eifcient CBRP in Mobile Ad Hoc Networks (MANETS).Proceedings of Vehicular Technology Conference, Calgary, Alberta, Canada, September2008.
[12] LU X B, ZHOU L Y.A Reliable Dynamic Source routing based Cluster Label in Mobile Ad Hoc Networks. Proceedings of Vehicular Technology Conference,Barcelona,Spain,April 2009.
[13] Chatterjee M,Sas S K,Turgut D.An On-Demand Weighted Clustering Algorithm (WCA) for Ad Hoc Networks. Proceedings of Global Telecommunications Conference, GLOBECOM ’00,San Francisco,USA,November 2000.
[14] Kevin C L, Michael L, Jerome H, et al.LOUVER:Landmark Overlays for Urban Vehicular Routing Environments.Proceedings of the 68th Vehicular Technology Conference (VTC-Fall'08),Calgary,Canada,September 2008.
[15] Brad K,Kung H T.GPSR:Greedy Perimeter Stateless Routing for Wireless Networks.Proceedings of the 6th Annual International Conference Mobile Computing and Networking(MOBICOM’00), Boston, MA, USA, August 2000.
[16] 冯涛.车联网技术中的信息安全研究[J].信息安全与技术,2011,(08):28-30. FENG Tao. The Research of Information Security in Internet of Vehicles[J]. Information Security & Technology,2011,(08):28-30.
[17] 东辉,唐景然,于东兴.物联网通信技术的发展现状及趋势综述[J].通信技术,2014,47(11):1233-1239. DONG Hui, TANG Jing-ran, YU Dong-xing. The Development Status and Trend of ToT Communication Technology[J].Communications Technology, 2014,47(11):1233-1239.
[18] 许勇.车联网通信协议研究和系统开发[J].桂林电子科技大学学报,2010,35(05):457-461. XU-Yong. Design and Implementation of Communication Protocols for Vehicular Networking[J]. Journal of Guilin University, 2010, 35(05): 457-461.
Development Status and Tendency of IoV Communication Technology
REN Kai-ming1, LI Ji-zhou2, LIU Ling-yan2, SONG Wen-ying2
(1.NO.30 Institute of CETC, Chengdu Sichuan 610041, China;2. Unit 91746 of PLA, Beijing 102206, China)
With wide application of Mobile Internet, IoT (Internet of Things) and WSN (Wireless Sensor Network), IoV (Internet of Vehicles) becomes one of the effective methods to achieve intelligent transportation. Communication technology,as the core technology in IoV, determines the overall performance of IoV. Firstly, the concept, architecture, characters and advantages of IoV is described, then the development status of IoV communication category, system, standard, routing protocol is discussed including the development of communication security technology, and meanwhile, the possible challenges of IoV communictaion technology are also analyzed. Finally the development trend of IoV communication technology is forecasted in accordance with the development trend of IoT and mobile Internet.
IoV; communication technology; routing protocol; communication standard
10.3969/j.issn.1002-0802.2015.05.001
2014-11-09;
2015-02-26 Received date:2014-11-09;Revised date:2015-02-26
TN914
A
1002-0802(2015)05-0507-07

任开明(1980—),男,硕士,工程师,主要研究方向为通信与网络技术;
李纪舟(1967—),男,研究生,高级工程师,主要研究方向为信息处理与通信技术;
刘玲艳(1982—),女,博士,工程师,主要研究方向为信息处理与通信技术;
宋文颖(1974—),女,硕士,工程师,主要研究方向为信息处理与通信技术。
猜你喜欢
机械工业标准化与质量(2022年6期)2022-08-12
党的生活(黑龙江)(2022年4期)2022-04-25
现代电子技术(2022年8期)2022-04-13
现代电子技术(2022年4期)2022-02-21
装备制造技术(2020年2期)2020-12-14
河南科技学院学报(自然科学版)(2020年2期)2020-05-22
铁道通信信号(2020年9期)2020-02-06
太原学院学报(自然科学版)(2019年3期)2019-09-23
太原科技大学学报(2019年3期)2019-08-05
科技与创新(2018年1期)2018-12-23
