
水下二次定位系统的定位算法研究
2015-02-21 06:48张建平
电子设计工程 2015年18期
张建平
(陕西工业职业设计学院 信息工程学院,陕西 咸阳 712000)
水下二次定位系统的定位算法研究
张建平
(陕西工业职业设计学院 信息工程学院,陕西 咸阳 712000)
基于目前思坦水声定位系统主控软件系统,采用了水声二次定位系统的水声传播原理,结合水面GPS定位技术,针对水下目标的位置坐标进行精确确定技术的方法编写的定位算法,通过思坦水声定位系统主控软件测试和大量实验,软件已经大量使用,研究的水下二次定位系统的定位算法可行性。
水声二次定位;GPS定位;主控软件;定位算法
水下勘探的相关技术越来越受到人们的重视,作为水下探测的一个重要分支,水声定位在水下探测领域中的诸多场合发挥着不可替代的作用,主要在GPS定位和水声定位相结合的水下定位系统基础上,对水下二次定位系统软件进行设计[1],主控软件的核心是数据采集和数据处理以及图形显示。主控软件采用Visual Basic开发,后台以Access数据库作为支撑,采用ADO方式连接。通过水上GPS定位技术与水下水声定位技术结合,达到水下应答器最精确的定位。
1 水下定位系统结构
主控软件在本系统中主要包含以下部分内容:GPS坐标接收部分、声学测距数据接收、串口设置、定位算法、数据界面处理及数据保存等,软控软件的框架如图1所示。主控软件的主要工作流程(如图2)。
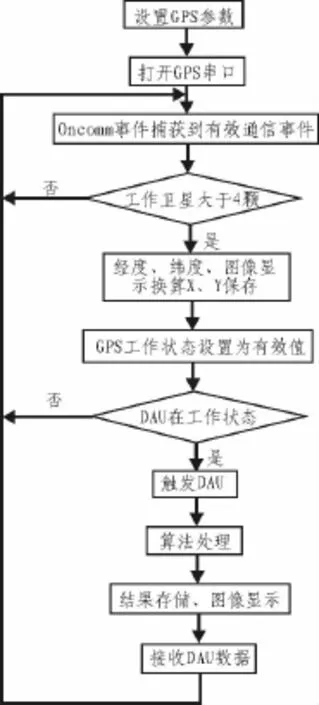
图2 主控软件工作流程Fig.2 Master software workflow
1.1 界面处理模块
本模块主要处理系统测量数据的界面显示和定位结果的界面显示。在本主控软件中,需要实时显示测量船轨迹图形[2]和实时定位结果。同时为了便于观察图形,图形界面上实现了图形的左右上下移动和放大缩小等功能。同时,为了用户使用方便,在界面上设计了许多快捷方式,以实现整个主控软件系统的其它功能。
1.2 串口设置及通信模块
串口设置及通信模块主要完成串口的设置及与外界的通信功能(。串口设置主要包括2个串口的设置:与DAU通信的串口设置和与GPS通信的串口设置。与DAU的通信采用固定通信速率:9600波特率,与GPS通信速率则需要与初始化GPS的时候设定的通信速率一致。与外界的通信则包括与GPS设备的通信和DAU通信,与GPS设备通信完成从GPS设备接收获得的经纬度、时间等GPS数据,不同GPS设备的数据格式不一样,系统具有一定的辨别能力。与DAU的通信包括采用系统内部的通信协议完成指令发送和声学测距数据的接收。
1.3 数据保存读取模块
本模块主要实现将接收到的实时GPS数据、DAU声学测距数据[4]等进行保存,同时还需要将一些中间结果及最终结果进行保存。如果需要,通过主程序可以打开以前的始源数据进行回放和事后分析。
2 水下定位系统的算法分析
定位算法模块主要是利用通信模块过来的GPS坐标数据和从DAU过来的声学测距数据,采用代数方程处理方法,精确求解目标防伪坐标。在求解目标方位坐标时,充分考虑系统特点,采用多种补偿方法抵消系统的固定误差。具体算法叙述如下:
当一个应答器有4个回应的时候,软件开始计算应答器的位置。假设4个点对应的直角坐标分别是(x1,y1),(x2,y2),(x3,y3),(x4,y4),它们对应的DAU测距分别是d1,d2,d3,d4。设应答器的坐标是(x,y),先利用前两个点计算应答器的位置:依据方程组:

就可以计算出一个应答器的位置,然后分别利用第1点和第3点,第1点和第4点,第2点和第3点,第2点和第4点,第3点和第4点的值计算出应答器的坐标位置,这样就总共有6个应答器的坐标位置值,若这6个值中有没有解的情况,则去掉该结果,然后取平均值,就可以得到一个应答器的位置坐标。当有第5个点回应的时候,用第2个点,第3个点,第4个点,第5个点又计算出应答器的位置,依次不断更新,最后结束后用聚类算法对解算得到的点进行处理,就可以得到计算的应答器的最后位置。
从GPS接收到的是经度信息和纬度信息,也就是我们通常所说的空间大地坐标系(如图3所示),而我们在定位计算的时候用到的是直角坐标,也就是通常所说的站心切平面坐标,所以要进行这两个坐标之间的转换。他们之间转换的时候要经过一个空间直角坐标系((如图4所示)。它们的定义如下所示。
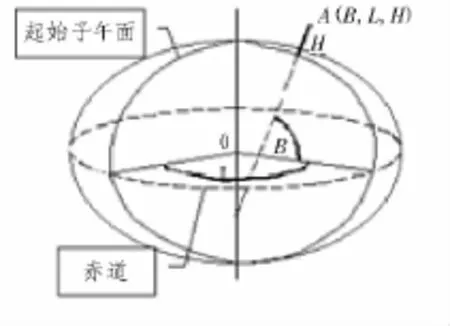
图3 空间大地坐标系Fig.3 Space geodetic system
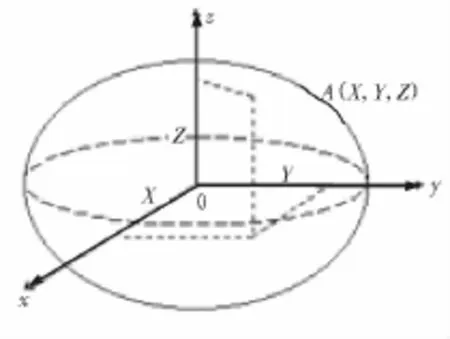
图4 空间直角坐标系Fig.4 Spatial cartesian
GPS坐标到站心切平面坐标(直角坐标)
GPS坐标到直角坐标的转换要先把GPS坐标转换成空间直角坐标,然后把空间直角坐标转换成站心切平面坐标(如图5所示),(即通常所说的直角坐标)。
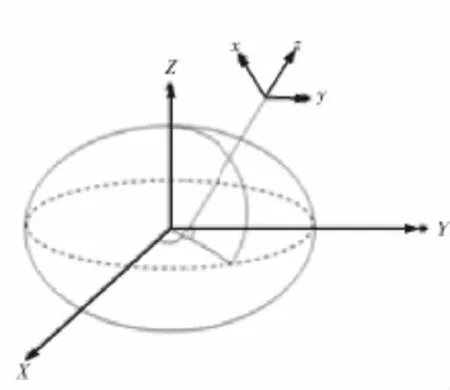
图5 站心切平面坐标Fig.5 Station eager plane
空间大地坐标到空间直角坐标的转换公式:
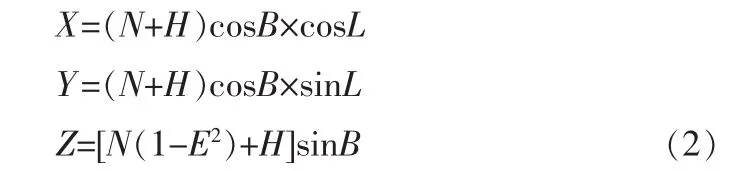
式中:B,L,H——椭球面上的大地纬度,大地经度和大地高;X,Y,Z——空间直角坐标;
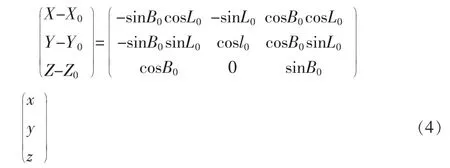
空间直角坐标到站心切平面坐标的转换公式:

式中,(B0,L0)为测站点(也就是通常所说的基准点)的大地纬度和大地经度,(X0,Y0,Z0)为测站点的空间直角坐标。
这样通过上面两步的坐标转换,就把一点的GPS坐标值转换成了站心切平面坐标。
站心切平面坐标(直角坐标)到GPS坐标的转换[6-7]。
直角坐标到GPS坐标的转换先要把直角坐标转换成空间直角坐标,然后把空间直角坐标转换成为GPS坐标。
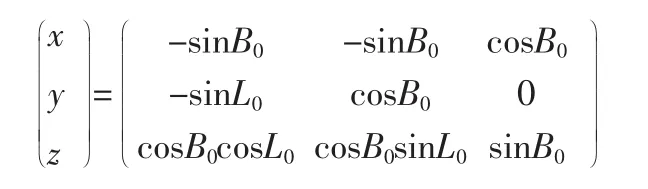
直角坐标到空间直角坐标的转换:
式中,(B0,L0)为测站点(也就是通常所说的基准点)的大地纬度和大地经度,(X0,Y0,Z0)为测站点的空间直角坐标。
空间直角坐标到GPS坐标的转换:
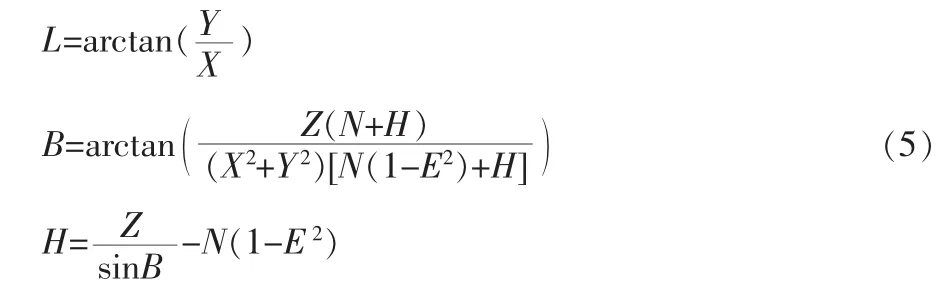
式中:B,L,H——椭球面上的大地纬度,大地经度和大地高;X,Y,Z——空间直角坐标;这样通过上面两步的坐标转换,就把一点的站心切平面坐标(直角坐标)转换成了GPS坐标。
最后,为了消除一些突发性错误而带来的毛刺影响,采用了聚类方法对定位结果进行了处理,以提高算法精度,最后结果保存显示。
3 结 论
算法的主控软件采用visualbasic开发,软件通过采用vb程序编写,数据库应用acess数据库,算法的编写测试已经通过,可以在实际中广泛应用于思坦水声定位系统,可提供高效及精确的水下定位,可应用于地震勘探并修正水下检波器的位置从而提高地震仪成像精度,因此可应用于海底地质、石油、天然气等勘探。
[1]吕双,徐维秀,杨晶,等.基于直达波的二次定位软件开发及应用[J].内蒙古石油化工,2011(6):17-21.LU Shuang,XU Wei-xiu,YANG Jing,et al.Location-based software development and application of the direct wave[J].Inner Mongolia Petrochemical Industry,2011(6):17-21.
[2]孟丽莎.无线传感器网络测距定位求精算法的研究[D].大连:大连理工大学,2012.
[3]周伟,来鸿飞,刘忠.水下无线传感器网络的节点精确定位[J].指挥控制与仿真,2007(1):50-52,55.ZHOU Wei,LAI Hong-fei,LIU Zhong.Node pinpoint underwater wireless sensor networks[J].Command Control&Simulation,2007(1):50-52,55.
[4]王利朋.AUV水下对接定位技术研究[D].大连:大连海事大学,2012.
[5]陈信.GPS数据的坐标变换[J].大众科技,2005(7):69-70.CHEN Xin.GPS data coordinate transformation[J].Chen Hsin Popular Science,2005(7):69-70.
[6]吴永亭,周兴华,杨龙.水下声学定位系统及其应用[J].海洋测绘,2003(4):18-21.WU Yong-ting,ZHOU Xing-hua,YANG Long.Underwater acoustic positioning system and its application[J].Ocean Mapping,2003(4):18-21.
[7]梁发菊,万国峰.无线传感器网络加权垂直平分线定位算法[J].工业仪表与自动化装置,2015(2):69-72.LIANG Faju,WAN Guofeng.Weightedmidnormal-based localization algorithm for wirelesssensornetworks[J].Industrial Instrumentation&Automation,2015(2):69-72.
Underwater research master software and localization algorithm secondary positioning system
ZHANG Jian-ping
(College of Information Engineering,Shaanxi College of Design Industrial Vocational,Xianyang 712000,China)
Based on the current Sitan acoustic positioning system control software system,using underwater acoustic propagation principle secondary acoustic positioning system,GPS technology combined with water,underwater target location coordinates for accurate method to determine the technical preparation of the localization algorithm by Sitan acoustic positioning system control software testing and a lot of experiments,the software has been widely used,location algorithm feasibility study underwater secondary positioning system.
acoustic secondary positioning;GPS positioning;master software;positioning algorithm
TN31
:A
:1674-6236(2015)18-0047-03
2014-12-08稿件编号:201412064
张建平(1978—),男,陕西岐山人,讲师。研究方向:计算机技术。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
人民交通(2022年5期)2022-06-16
铁道通信信号(2020年9期)2020-02-06
资源导刊(信息化测绘)(2019年4期)2019-05-18
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02
系统工程与电子技术(2016年7期)2016-08-21
铁道勘察(2016年3期)2016-08-01
铁道通信信号(2016年4期)2016-06-01
城市轨道交通研究(2015年11期)2015-02-27
