基于ADAMS的虚拟样机技术课程教学实践
2015-02-13 07:39李力
吉首大学学报(自然科学版) 2015年4期
李 力
(中南大学机电工程学院,湖南 长沙 410012)
基于ADAMS的虚拟样机技术课程教学实践
李 力
(中南大学机电工程学院,湖南 长沙 410012)
利用虚拟样机技术ADAMS软件的先进性与成效性,以培养学生创新能力为教学目的,采用课堂讲授与现场实践互动、加强实践性教学环节、科研成果融入教学等模式,开展《机械系统虚拟样机建模与仿真》课程的教学与实践.在学习基本ADAMS/View软件建模与仿真的基础上,突显了机电方向的多学科融合特点,建立了机械系统运动副和驱动约束方程,完成了机械系统的参数化建模与设计、机-液-电多学科协同仿真应用分析及工程机械ADAMS/ATV履带车工具箱建模方法与实践,以期探索提高高校学生创新能力的新模式.
虚拟样机;ADAMS软件;建模;协同仿真;创新能力
市场竞争日益激烈,企业需要解决产品的上市时间、质量、成本等难题.随着现代计算机技术的高速发展,虚拟样机技术为解决上述难题提供了手段与方法.近20年来,虚拟样机技术在汽车制造业、航空航天、工程机械、农业机械、船舶业等多领域应用广泛,对提高中国基础工业机械产品设计与制造水平起到了重要作用,成效显著.[1]
培养高素质创新型人才是中国高校的教育宗旨.鉴于目前虚拟样机技术的先进性和成效性,中国大部分高等理工科院校的机械类专业均开设虚拟样机技术的相应课程,该课程已成为工科类机械、汽车、航空等专业学生用于提高机械设计和创新能力的一门特色课程[2].特别是,针对实际机电系统的复杂性与耦合性,虚拟样机技术的相应课程将作为工科机械制造专业机械电子工程方向的必修或选修课程.

图1 跳跳蛙玩具的虚拟样机模型
中南大学机电工程学院以机械制造及自动化专业的机械电子方向本科生为培养对象,采用目前国际上应用广泛且具有权威性的机械系统动力学自动分析软件ADAMS(Automatic Dynamic Analysis of Mechanical System)软件为平台,开设了基于虚拟样机技术的《机械系统虚拟样机建模与仿真》课程,取得了令人满意的成绩.选修了该课程的学生,在机械设计创新大赛、课程设计、毕业设计中均采用虚拟样机建模与仿真方法,所完成的机电产品在设计水平和创新性方面得到很大的提升,教学效果明显.中南大学学生在专业课程设计中,采用ADAMS/View软件所设计的跳跳蛙玩具的虚拟样机模型见图1.
1 基于ADAMS软件的虚拟样机技术
美国MDI公司开发的ADAMS软件包括基本模块、扩展模块、接口模块、专业领域模块及工具箱[3],具有交互式图形建模与仿真环境,能提供零件库、约束库、力库,创建机械系统的参数化模型.该软件具有开放式的程序结构和多种接口,可作为用户的二次平台开发.

图2 虚拟样机实现过程
机械系统的虚拟样机技术的实现过程包括建造、测试、验证、改进及自动化等[1],如图2所示.其中,建造、测试和改进是虚拟样机建立与仿真的基础.建造是将机械系统几何实体模型施加约束力与驱动,建立虚拟样机模型;测试是建立虚拟实验条件与环境,再现机械系统的试验过程;改进是采用参数化功能进行实验设计和模型优化,以及在机械模型基础上加配控制和液压系统等模型,形成机-电-液联合模型,获得较为接近实际的目标产品.采用如图2所示的虚拟样机手段,产品的开发周期缩短,开发成本降低,设计质量提高,市场竞争能力得到提升.
2 课程教学模式的构建
《机械系统虚拟样机建模与仿真》课程的授课对象主要是机械制造及自动化专业机械电子工程方向的本科生.利用ADAMS软件与多学科软件的融合性,以机械系统虚拟样机的建模理论为基础,从简单机构至复杂机构,从单一机械系统至机电液联合系统一一进行建模与仿真.
为了使机制专业机械电子工程方向的本科生熟悉掌握ADAMS软件基本功能与基本模块操作方法,采用ADAMS软件熟练建立机械系统的虚拟样机模型,掌握其仿真、分析和优化,提高机械电子工程方向本科生的机械产品设计能力.同时,为避免该课程的教学内容枯燥无味,笔者对其教学模式进行了优化.
2.1 精选适合本专业学生的教学内容
本课程的前期课程为《机械原理》、《机械零件》、《液压传动与控制》和《控制系统数字仿真》.在学习本课程时,学生已对机械系统有了一定的了解,对液压系统与控制系统有了一定的认知.笔者以机械系统为主要授课内容,结合液压系统及电控系统,将教学内容设置为4大部分:机械系统建模,虚拟样机仿真与分析,机械系统参数化设计与优化,机械-电控系统和机械-液压系统的协同仿真.
2.2 加强课堂讲授与现场实践互动环节
基于ADAMS软件的建模和仿真的现场教学方式,要求学生自带已安装好的ADAMS软件的笔记本跟随教师一起实践,每节课1个案例,学生边听边操作.在案例的具体操作过程中,学生可以掌握ADAMS 软件的基本命令、基本模块、建模过程、仿真过程、利用后处理分析机械系统的运动学与动力学参数等.课后布置练习作业,便于学生巩固课堂教学内容和ADAMS操作方法.
2.3 增强实践性教学环节
本课程教学过程中,要求学生完成一项科研小项目,该项目内容完成情况占期末考试成绩的20%.要求运用ADAMS软件解决机械系统分析、建模、仿真及分析、优化等问题,达到教学与科研一体化的教学目的,培养学生分析与解决问题的能力,增强创新意识.
2.4 融入科研成果于教学环节
将教师的科研项目成果引入课堂教学中,以科研项目中的虚拟样机为实例,向学生讲授怎样分析科研项目中虚拟样机的技术要求、工况、基本原理等科研基本要素,让学生了解采用ADAMS软件如何解决科研中虚拟样机的问题,同时感受ADAMS软件在机械电子一体化的科研中的重要作用.
2.5 增设现场考试环节
为了充分体现学生对本课程的学习与实践状况,避免软件类课程考试变成开卷考试形式,采用在ADAMS软件实验室现场完成机械系统虚拟样机建模与仿真考试方式,提交电子考试卷与机械系统虚拟样机模型,现场考试环节占期末考试成绩的70%.
3 课程教学实践案例分析
3.1 机械系统运动副和驱动约束方程建立
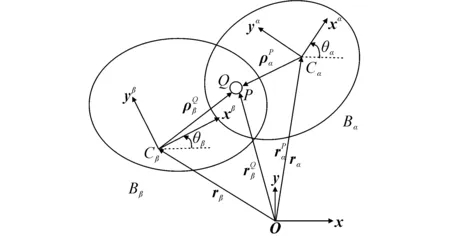
图3 平面转动铰运动学约束方程示意
建立机械系统常用的运动副(如转动铰、滑移铰、平面相对圆柱铰、柱销-滑移副、凸轮从动副、齿轮副、齿轮与齿条等)的约束方程和驱动(如转动驱动、滑移驱动和滑动驱动)的约束方程,让学生掌握各种运动副和驱动的建模原理,以便在复杂机械系统建模时正确理解运动副和驱动,对其进行符合实际的简化或组合.例如,刚体Bα和Bβ在公共基xoy内构成平面转动铰的运动学约束方程(图3)、自由度,以及与ADAMS软件的关系[4].
3.2 机械系统参数化建模与设计

图4 “门锁”夹紧机构虚拟样机参数化设计
在产品设计过程中,需要不断修改产品虚拟样机的相关参数,达到优化产品性能的目的.例如,利用ADAMS软件参数化的设计研究、试验设计和优化分析的功能,开展产品参数的敏感度分析、多个变量同时发生变化时对虚拟样机性能影响,以及优化设计参数,自动更新虚拟样机模型,使产品性能达到最佳,形成最优的虚拟样机.采用ADAMS软件自带的“门锁”图4.
3.3 多学科协同仿真应用分析

图5 冶金出铝车虚拟样机模型
机电一体化行业强调,利用ADAMS软件所提供的机械系统与控制系统的接口功能,开展机电系统的协同仿真,可以获得优化的机电一体化系统整体性能.(ⅰ)将机械系统CAD模型导入ADAMS/View软件中,形成虚拟样机模型;(ⅱ)利用ADAMS软件提供的线性控制模块和滤波模块,实现前置滤波、PID控制和其他连续时间单元的模拟仿真;(ⅲ)利用ADAMS/Control模块支持Matlab、AMESim等软件分析功能,将机械系统与控制系统有机地连接起来,实现在复杂控制算法下对机电系统的协同仿真,使机械电子工程专业的本科生学会一种全新的机电一体化设计方法.
(1)机械系统与CAD软件结合.在冶金行业中,中国首台用于电解铝生产的出铝车虚拟样机模型[5]如图5所示.出铝车的中部缺口设计使得车体在结构上存在严重不对称,而在运输过程中出铝包的平稳性要求很高;为此,利用虚拟样机技术ADAMS/View软件,对出铝车在行驶过程中操控性与平顺性进行分析.利用ADAMS/View软件与CAD软件的接口,将出铝车PRO图形导入ADAMS/View软件,并建立轮胎和地面模型和出铝车的虚拟样机,对出铝车在直线与转弯行走时的动力学进行仿真,获得铝车的直线行走和转弯的动力学特性.通过此案例的分析,将CAD软件模型导入ADAMS软件,并进行仿真分析,获得了机械系统的特性曲线.
(2)机械系统与液压系统协同仿真.利用AMESim仿真软件建立出铝车行走驱动与悬挂系统的液压系统,确定液压系统的参数为出铝车虚拟样机的输入参数,利用ADAMS/Control模块导出AMESim软件的接口模块,将出铝车虚拟样机导入其液压系统模型中,建立出铝车与其液压系统的协同仿真模型[5](图6).利用ADAMS和AMESim软件平台对出铝车在液压系统驱动下的直线行走和转弯进行仿真,获得出铝车的机械与液压系统的整体性能.通过此案例分析与学习,学生学会将液压系统软件AMESim模型导入ADAMS软件,协同仿真机械系统与液压系统.

图6 冶金出铝车机-液系统协同仿真模型

图7 履带式海底采矿车虚拟样机模型
(3)ADAMS/ATV履带车工具箱建模.履带式车辆主要应用于工程机械产品,是中国机械行业的主要产品之一.利用ADAMS软件的ATV履带车工具箱,开发履带式工程机械车辆.采用ADAMS/ ATV履带车工具箱,建立了中国第1台1 000 m海洋矿产资源采矿系统的履带式海底采矿车虚拟样机模型[6](图7).鉴于海底底质稀软的环境特性,海底采矿车采用履带式.利用ADAMS/ ATV履带车工具箱建立海底采矿车虚拟样机,对海底采矿车在海泥上行走进行仿真,获得其运动学和动力学特性.该案例使得学生掌握了ADAMS/ ATV履带车工具箱的使用和解决履带式工程机械的关键问题.

图8 全地形履带车虚拟样机模型

图9 全地形履带车与控制系统协同仿真模型
(4)机械系统与控制系统协同仿真.利用ADAMS/ATV履带车工具箱建立全地形履带车虚拟样机模型[8](图8).为了使全地形车在越障过程中能按预定路径直线行走,利用Matlab软件开发控制算法,确定控制系统的输出参数为全地形履带车,利用ADAMS/Control模块导出与ADAMS/ATV软件的接口模块,将全地形履带车虚拟样机导入其控制系统模型中,建立全地形履带车与其控制系统的协同仿真模型[9](图9).利用ADAMS/ATV和Matlab软件平台对全地形车与控制系统的越障进行仿真,获得全地形履带车在控制算法下的越障性能[7].此案例采用Matlab软件与ADAMS/ATV软件协同仿真的方法,将机械与控制系统联合且协同仿真.
4 结语
《机械系统虚拟样机建模与仿真》课程以培养学生创新能力为教学目的,结合高校机械制造及自动化专业机机械电子工程方向的多学科特点,利用虚拟样机技术ADAMS软件的先进性,构建了融合理论和实践教学于一体化的教学模式,突出了互动性教学、增加实践性教学环节、现场考试等方式,将科研与工程实践应用教学于全过程.
[1] 陈立平,张云清,任卫群.机械系统动力学分析及ADAMS应用教程[M].北京:清华大学出版社,2005.
[2] 杨 莺,王 刚.虚拟样机技术应引入高校工科类课程教学[J].宁波职业技术学院学报,2004,8(5):78-79.
[3] 郑建荣.ADAMS虚拟样机技术入门与提高[M].北京:机械工业出版社,2001.
[4] 洪嘉振,刘锦阳.机械系统计算动力学与建模[M].北京:高等教育出版社,2011.
[5] 李 力,温荣耀,陈 铭,等.新型出铝车机电液协同仿真与有限元分析[J].中南大学学报:自然科学版,2014,45(7):2 201-2 208.
[6] LI Li,ZHONG Jue.Research of China’s Pilot-Miner in the Mining System of Poly-Metallic Nodule[C].Proceedings of the Sixth International Society of Offshore and Polar Engineers,Ocean Mining Symposium,2005:124-131.
[7] LI Li,LIU Shaojun,WU Changbin,et al.Simulation of Motion Performance for a Cobalt Crust Miner on Seamounts[C].Proceedings of the Seventh International Society of Offshore and Polar Engineers,Ocean Mining Symposium,2007:153-157.
[8] 李 力,张 正,陈 铭,等.基于Lyapunov理论的海底采矿车点镇定控制[J].中南大学学报:自然科学版,2014,45(8):2 624-2 628.
(责任编辑 陈炳权)
Course Teaching and Practice of “Virtual Prototype Technology” Based on ADAMS
LI Li
(College of Mechanical and Electrical Engineering,Central South University,Changsha 410083,China)
Based on the advancement and effectiveness of the virtual prototype technology in ADAMS software,the teaching and practice of the course "Modeling and Simulation of Virtual Prototype of Mechanical System" mainly focus on the creation of students' innovation ability,combination of lecture and practice,enhancement of practical teaching,and introduction of research achievement into teaching.Based on modeling and simulation in ADAMS/View,the design of this course highlights the multi-disciplinary features of electromechanical engineering,and aims at teaching students to build the kinematic pair and constraint equations,to build and design the parameterization model,to simulate the machine which combines mechanical /hydraulic/electrical system,and to build the tracked vehicle model using ADAMS/ ATV.Through this course design,a new teaching method to improve the innovation ability of students in the university is explored.
virtual prototype;ADAMS software;modeling;co-simulation;innovation ability
1007-2985(2015)04-0075-05
李 力(1963—),女,湖南益阳人,中南大学机电工程学院教授,主要从事海洋技术、车辆技术与机电一体化等研究.
G642
A
10.3969/j.issn.1007-2985.2015.04.018
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
装备制造技术(2020年4期)2020-12-25
建材发展导向(2019年10期)2019-08-24
中国交通信息化(2019年6期)2019-08-23
电子制作(2018年10期)2018-08-04
时代农机(2016年6期)2016-12-01
浙江大学学报(工学版)(2016年2期)2016-06-05
现代工业经济和信息化(2016年5期)2016-05-17
环境科技(2015年4期)2015-11-08
河南科技(2014年3期)2014-02-27