机载预警雷达与电子侦察协同工作对作战效能的影响研究*
2015-02-13 04:08马健,彭芳,吴岚
西安工业大学学报 2015年10期
马 健,彭 芳,吴 岚
(1.西北工业大学 电子信息学院,西安710129;2.空军工程大学 航空航天工程学院,西安710038)
预警雷达和电子侦察(Electronic Support Measure,ESM)是预警机两种重要的传感器.预警雷达通过接收自身发射的电磁波测量目标的位置信息和运动特性;ESM通过侦收、测量、分析辐射源的信号特征,并与事先加载的目标信息数据库进行对比分析,确定目标的身份与平台类型并评估威胁等级.预警雷达与ESM协同工作,能充分发挥各自的优点,弥补单一传感器的不足.目前针对预警雷达与ESM协同工作研究主要集中在以下方面.文献[1-2]利用ESM的测量信息引导雷达探测,这种情况下雷达先静默,ESM得到目标角度信息后引导雷达快速发现目标,研究主要集中在ESM引导下雷达搜索目标所需时间及成功率上;文献[3-5]将雷达和ESM各自测量的位置信息进行融合处理,进一步提高对目标位置的测量跟踪精度,研究主要集中在雷达与ESM航迹相关的算法上;文献[6-7]就雷达和ESM协同工作时资源管理进行研究,研究主要集中在两种传感器协同工作情况下时间的分配、辐射的控制上.以上研究均未讨论雷达与ESM协同工作对作战效能的影响,文中针对机载预警雷达与ESM协同工作带来的信息优势,研究雷达与电子侦察协同工作对预警机作战效能的影响,以期改进远距引导概率.
1 预警雷达与ESM协同工作模式
机载预警雷达与ESM协同探测模式主要有常规综合探测模式、重点方向综合探测模式以及ESM牵引雷达探测模式等.
常规探测模式是初始工作模式,同时也为其他工作模式的进入提供初始触发条件.在该模式下,由于不具备对战场环境的先验信息,雷达与ESM独立工作,不进行关联协同;重点方向综合探测工作模式主要适用于无敌方电磁干扰条件下,并且已知目标来袭方位,或对某些感兴趣方位的重点搜索,此模式下对雷达和ESM探测信息进行融合处理;ESM牵引雷达探测模式主要用于敌方实施电磁干扰或雷达静默情况下,由ESM系统对目标进行定位,牵引雷达进行目标探测,此模式下也对雷达和ESM探测信息进行融合处理.
2 预警雷达与ESM协同工作性能分析
预警雷达与ESM协同探测优势体现在以下两方面[2]:①利用ESM的测量信息,引导雷达探测信息可以减少雷达搜索空域,节约雷达的资源;②对雷达和ESM各自测量的目标位置信息进行融合处理,可进一步提高对目标位置的测量精度.
2.1 ESM对雷达的引导
ESM是无源传感器不辐射电磁波,具有很强的隐蔽性,但ESM只测向不测距,且测向精度不能满足武器系统的要求,因此ESM应与雷达配合使用.在ESM牵引雷达探测模式下,通过ESM探测到目标的大致方向后,引导雷达对目标进行准确定位.由于雷达波束较窄,ESM一般不能一次引导成功,雷达要在ESM指示方向的周围进行小范围搜索,才能截获目标.
机载ESM通常安装在机头、机尾及两个翼尖位置,只提供方位角信息,设目标处在ESM俯仰波束覆盖空域中,目标方位角为φ,ESM对目标方位角测量值为φ^,测量误差服从高斯分布,均方误差为σ2,若雷达方位波束宽度为θ,则ESM对雷达一次引导成功的概率[1-2]为
假设雷达的方位波束宽度为2°,ESM测角均方根误差分别为1°,2°,3°,4°,雷达在 ESM 指示方位的周围对目标进行搜索.图1给出了不同搜索波位数下,ESM对雷达成功引导的概率.
从图1中可以看出,只需8个搜索波位,ESM对雷达的成功引导概率就可达到0.99以上.若没有ESM引导,雷达要在-60°~60°方位范围内,以0.99的概率截获目标,大约需要60个搜索波位,因此ESM引导可以大大减少雷达的搜索时间,节省雷达资源80%以上.另外ESM测角误差越小,引导成功率越高.
2.2 ESM与雷达的数据融合



图1 ESM对雷达成功引导概率Fig.1 Successful probability of ESM guiding radar to search target
一般情况下,雷达和ESM测量误差不相关,则数据融合后的方差为
设ESM方位角测角均方误差为3°,雷达方位角测角均方根误差均为1°,目标方位角真值为45°,图2给出ESM和雷达方位角数据融合后的结果.
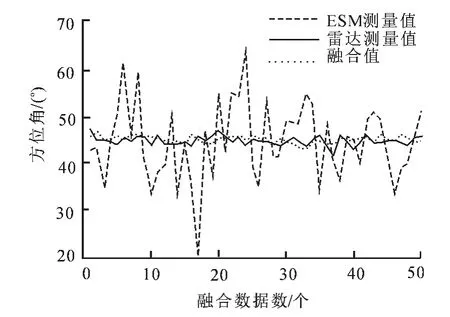
图2 雷达与ESM融合处理后的测量误差Fig.2 Measure error of data fusion of radar and ESM
由图2可见,两个传感器融合后的测量误差小于单一传感器的测量误差,仿真结果说明ESM和雷达的数据融合能够提高对目标的测量精度.
3 协同工作对预警机作战效能的影响分析
预警机的主要功能是预警探测和指挥引导,其作战效能包括探测效能和引导效能.在ESM牵引下预警雷达可缩小搜索区,节约的资源可转化为脉冲积累数的增加,提高了预警雷达作用距离,从而提高探测效能;雷达与ESM探测数据融合处理后,提高了目标的测量精度,从而提高对战斗机引导成功率.下面定量分析协同工作对探测效能和引导效能的影响.
3.1 ESM引导雷达探测对探测效能的影响分析
探测效能体现在作用距离上,作用距离远预警时间长,则探测效能高.根据机载预警雷达发现概率与作用距离R曲线,可定量的映射出作用距离与探测效能的关系,从而得到不同作用距离所对应的探测效能.
一般雷达最大作用距离方程[8]可表示为

式中:Pt为雷达发射机峰值功率;G为雷达天线增益;λ为工作波长;σs为目标有效反射面积;L为损耗因子(包括发射馈线、接收馈线和电波双程传播损耗等);T0为标准室温,一般取290K;K为波耳兹曼常数(K=1.38×10-23J·K-1);Bn为接收机带宽;Fn为噪声系数;(S/N)min为最小输出信噪比.
采用平方律检测时,对于SwerilingⅡ型起伏目标,雷达虚警概率和发现概率[9]分别为
式中:T为检测门限;N为脉冲积累数目;χ为N个采样的信噪比均值;I(·,·)为不完全伽马函数的皮尔逊形式.
由式(7)雷达方程,可令

将χ、R视为随机变量,根据式(9)~(10)可得发现概率与作用距离关系式为

选用E-2C预警机相关参数进行仿真[10-12],取Pfa=10-6,A=2.6×1025m2,得到雷达对不同雷达散射截面(Radar Cross Section,RCS)目标的发现概率,如图3所示.图3中横坐标为雷达作用距离,纵坐标为发现概率,反映在虚警概率一定值时,雷达在最大作用距离处的发现概率,可见目标RCS的变化对雷达作用距离影响较大.
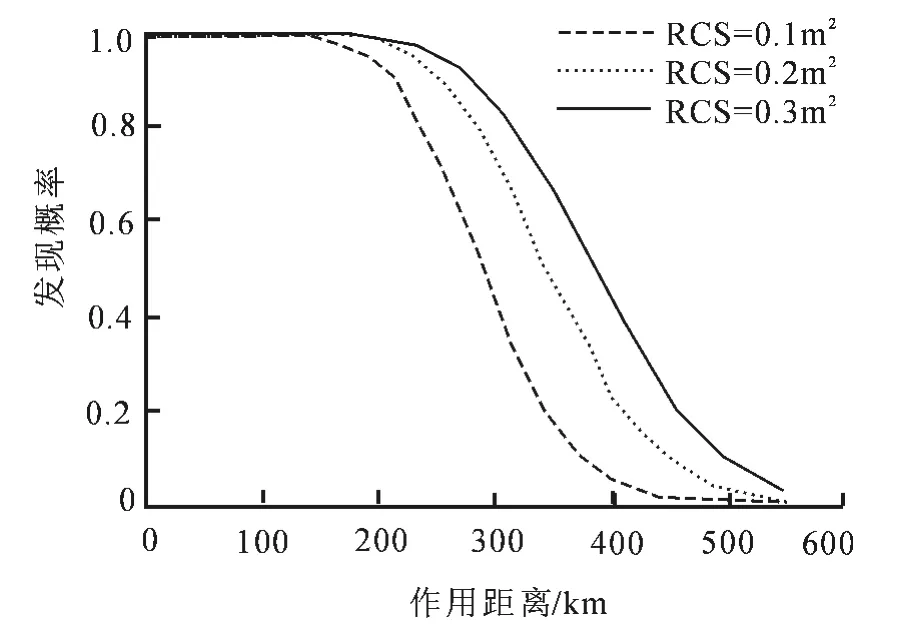
图3 发现概率随距离变化曲线Fig.3 Curve of detection probability with range
对图3曲线上逐点用曲线所包围的面积作归一化,得到发现概率的概率密度函数随距离变化曲线,再对发现概率的密度函数曲线积分得到探测效能随距离变化曲线如图4所示.图4中的曲线是发现概率的分布函数,具有实际物理含义,如在RCS=0.1m2的曲线上任选一点(300,0.71),该点表示雷达作用距离在0~300km区间内,在所有距离上发现概率之和为0.71,该值反映出雷达对300km处RCS=0.1m2目标的探测效能为0.71.这样处理将雷达的作用距离量化为探测效能.

图4 探测效能曲线Fig.4 Curve of detection effectiveness
由图4可见随着雷达作用距离的增加,探测效能随之增加,这与实际相一致,即作用距离越远,预警时间越长,则探测效能越高;在相同条件下目标RCS不同,探测效能也不同,目标RCS越大探测效能越高.通过分析可见,在ESM牵引下预警雷达可缩小搜索区,增加脉冲积累数,提高了预警雷达作用距离,从而有效提高探测效能,且作用距离的远近可直接量化为探测效能的高低.
3.2 ESM与雷达的数据融合对引导效能的影响分析
在远距引导过程中,平行接近法是一种有效的引导方法,与其他引导方法相比,该方法的捕获性能更好.航向引导阶段的几何位置模型如图5所示,其中q为目标进入角,φL为碰撞前置角[13-15],目标机(T)运动速度为VT,拦截机(J)运动速度为VJ,两机间距为R,经时间T,两机在B点碰撞.
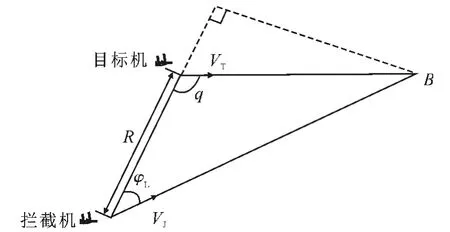
图5 几何位置模型Fig.5 Model of geometrical position
在该引导方式下,由几何位置关系可知

建立水平引导误差模型如图6所示,其中A点表示测量得到的目标位置,B点为碰撞点,Δq1为拦截机与目标机之间的测量视线与真实视线的误差角,由于拦截机与目标机距离R很大,ΔRa≪R,因此Δq1≈ΔRa/R,ΔRa为目标垂直于视线方向的位置误差.
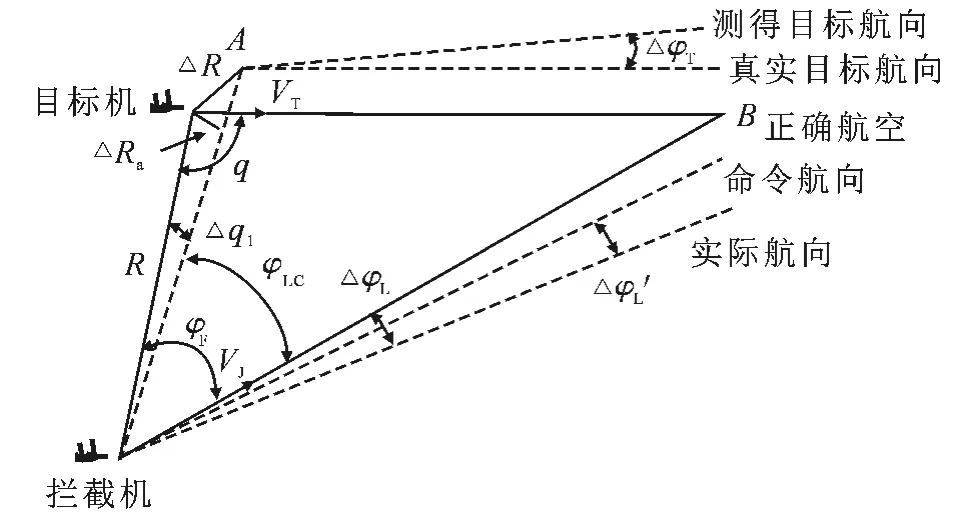
图6 水平引导误差模型Fig.6 Error analysis model of the level guidance
由于预警机对目标进入角q和目标速度VT的测量存在误差,精确的φL是不能得到的,而只能求出指令航向角φLC.目标进入角q的误差来自两部分:一项是目标航向测量误差ΔφT,另一项是目标视线角误差Δq1.由于误差存在,预警机相对于错误视线计算了φLC[16],具体为
如果拦截机雷达的方位搜索角为±φa,碰撞路线总航向误差是服从均值为0,均方差为σφL的正态分布,则引导成功概率为

其中E为航向误差分布的概率偏差[16],且E=0.675σφL.
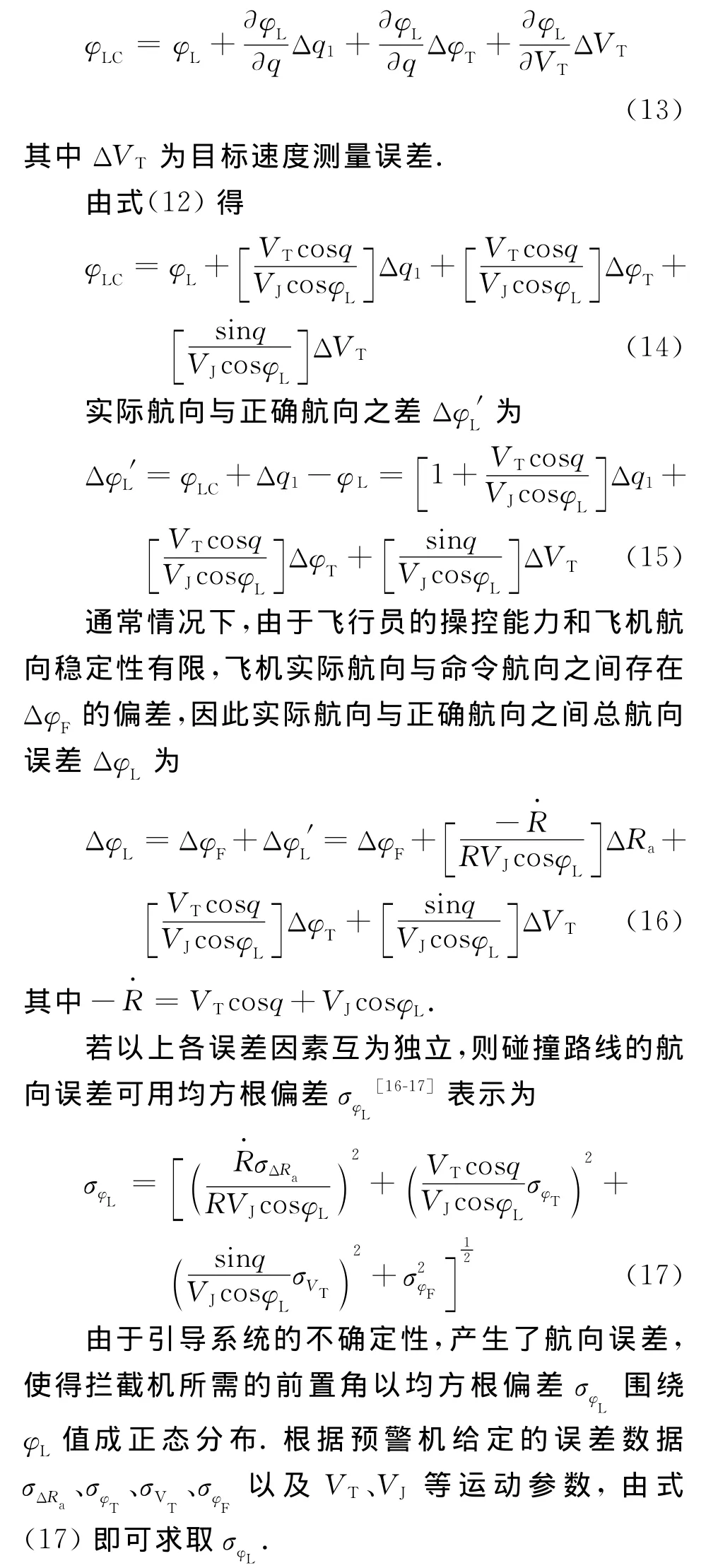
拦截机到达引导区域后对目标的搜索方式不同、进入角不同,其探测距离也不尽相同,因此在仿真时模拟几种典型的搜索模式进行对比分析.机载火控雷达搜索方式分为边搜索边测距(Range While Search,RWS)方 式、速 度 搜 索 (Velocity Search,VS)方式及边扫描边跟踪(Track While Scan,TWS)方式,仿真时三种搜索方式下探测距离分别设为180km、200km、150km,其他参数设置见表1.计算迎头拦截时,RWS、VS及TWS等三种搜索方式所对应的远距引导概率,获得远距引导概率与目标航向测量误差精度的关系曲线,如图7所示.
表1 仿真参数设置表Tab.1 Simulation parameter setting

图7 远距引导概率与目标航向测量误差的关系曲线Fig.7 Curve of long-distance guidance probability with course measuring error
由图7可以看出,远距引导概率随航向测量误差的增大而呈下降趋势,当误差由10°往上逐步增加时,下降趋势越来越明显,到20°时引导概率降为0.97左右.同时可以看到,拦截机到达引导区域后对目标机搜索方式不同,引导成功率也不同.取航向误差数值为一定值时,在三种搜索模式中,VS方式的引导概率最大,其次为RWS搜索方式和TWS方式.这说明当进入角一定后,拦截机的航向误差随截获距离的缩短而增加,从而导致远距引导概率下降.
4 结 论
文中研究了预警雷达与ESM协同工作对预警机探测效能和引导效能带来的优势,并定量分析了协同工作对探测效能和引导效能具体影响,所得结论为
1)随着雷达作用距离的增加,探测效能随之增加,这与实际相一致,即作用距离越远,预警时间越长,则探测效能越高;在相同条件下目标RCS不同,探测效能随之不同,目标RCS越大,探测效能越高.
2)在ESM牵引下预警雷达缩小了搜索区,增加了脉冲积累数,提高了预警雷达作用距离,有效提高了探测效能,且作用距离的远近可直接量化为探测效能的高低.
3)取航向误差数值为一定值时,在三种搜索模式中,VS方式的引导概率最大,其次为RWS方式和TWS方式.当进入角一定后,拦截机的航向误差随截获距离的缩短而增加,导致远距引导概率下降.
[1] 王国宏,毛士艺.ESM对2D雷达引导性能分析[J].航空学报,2002,23(4):298.WANG Guo-hong,MAO Shi-yi.Performance Analysis of an ESM Guiding a 2DRadar[J].ACTA Aeronautica ET Astronautica Sinica,2002,23(4):298.(in Chinese)
[2] 王建明,刘国朝.舰载雷达与ESM 协同探测方法研究[J].舰船电子对抗,2007,30(6):11.WANG Jian-ming,LIU Guo-chao.Research of Cooperative Detection Methods for Shipboard Radar and ESM [J].Shipboard Electronic Countermeasure,2007,30(6):11.(in Chinese)
[3] CHALLA S,PULFORD G W.Joint Target Tracking and Classification Using Radar and ESM Sensors[J].IEEE Trans on Aerospace and Electronic Systems,2001,37(3):1039.
[4] KALANDROS M,PAO L Y.Multisensor Covariance Control Strategies for Reducing Bias Effects in Interacting Target Scenarios[J].IEEE on Aerospace and Electronic Systems,2005,41(1):153.
[5] WANG G H,MAO S Y,HE Y,et al.A Triple-Threshold Radar-to-ESM Correlation Algorithm when Each Radar Track is Specified by Different Number of Measurements[J].IEEE Proceedings-Radar,Sonar and Navigation,2000,147(4):177.
[6] 薛朝晖,周文辉,李元平.机载雷达与红外协同资源管理技术[J].现代雷达,2012,34(3):1.XUE Zhao-hui,ZHOU Wen-hui,LI Yuan-ping.Technology of the Cooperative Resource Management for Airborne Active Radar and Passive IR[J].Modern Radar,2012,34(3):1.(in Chinese)
[7] OLIVIER B,LAURENT R.Radar Scheduling with E-mission Constraints[C]//Proceedings of the 2002SPIE Conference on Acquisition Tracking and Pointing XVI.Bellingham:Society of Photo-Optical Instrumentation Engineering,2002:153.
[8] 丁鹭飞,耿富录,陈建春.雷达原理[M].北京:电子工业出版社,2011.DING Lu-fei,GENG Fu-lu,CHEN Jian-chun.Radar Principle[M].Beijing:Publishing House of Electronics Industry,2011.(in Chinese)
[9] MARK A Richards.雷达信号处理基础[M].邢孟道,译.北京:电子工业出版社,2008.RICHARD M A.Fundamentals of Radar Signal Processing[M].XING Meng-dao,Transl.Beijing:Publishing House of Electronics Industry,2008.(in Chinese)
[10] 张昆辉.机载雷达手册[M].北京:国防工业出版社,2013.ZHANG Kun-hui.Airborne Radar Handbook[M].Beijing:Publishing House of National Defense Industry,2013.(in Chinese)
[11] 张宝祥,吉永刚,李青.舰载预警机预警探测效能分析[J].飞机工程,2009(1):75.ZHANG Bao-xiang,JI Yong-gang,LI Qing.Research on the Early Warning and Detecting Efficiency of Carrier AEW & C[J].Aircraft Engineering,2009(1):75.(in Chinese)
[12] 陆军.世界预警机概览[M].北京:电子科学研究院,2010.LU Jun.World Early-Warning Aircraft Overview[M].Beijing:Academy of Electronic and Information Technology,2010.(in Chinese)
[13] 付海峰,刘华伟,张宗麟.歼击机碰撞引导截击效能的影响因素分析[J].电光与控制,2007,14(1):17.FU Hai-feng,LIU Hua-wei,ZHANG Zong-lin.Affecting Factors of Fighter’s Interception Efficiency in Collision-Course Guidance[J].Electronics Optics& Control,2007,14(1):17.(in Chinese)
[14] 于雷,李言俊,欧建军.现代战机最佳导引算法研究[J].航空学报,2006,27(2):314.YU Lei,LI Yan-jun,OU Jian-jun.Research of Optimal Guidance Algorithm for Modern Fighter[J].Acta Aeronautica Et Astronautica Sinica,2006,27(2):314.(in Chinese)
[15] 鞠传文,杨秀珍.某型歼击机远距导航效能的计算[J].电光与控制,2002,9(2):22.JU Chuan-wen,YANG Xiu-zhen.Computation on Long-Distance Navigation Effectiveness for Fighters[J].Electronics Optics & Control,2002,9(2):22.(in Chinese)
[16] 王更辰.机载雷达总体论证与设计[M].西安:空军工程大学,2008.WANG Geng-chen.Airborne Radar System Analysis and Design[M].Xi’an:Air Force Engineering University,2008.(in Chinese)
[17] 裴云.预警机系统防空预警及拦截引导效能分析与评估[J].电光与控制,2007,14(6):43.PEI Yun.Effectiveness Analysis and Evaluation of Early-Warning Aircraft in Air-Defense Early-Warning and Intercept Guidance[J].Electronics Optics &Control,2007,14(6):43.(in Chinese)
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
中学生数理化·中考版(2022年8期)2022-06-14
新世纪智能(高一语文)(2021年3期)2021-07-16
今日农业(2020年22期)2020-12-14
民用飞机设计与研究(2019年4期)2019-05-21
价值工程(2017年4期)2017-02-16
电子制作(2017年24期)2017-02-02
当代经济(2015年4期)2015-04-16
现代企业(2015年6期)2015-02-28
天然气与石油(2015年1期)2015-02-28