神经网络的故障诊断方法研究*
2015-02-13 04:09耿朝阳薛倩倩
西安工业大学学报 2015年7期
耿朝阳,薛倩倩
(西安工业大学 计算机科学与工程学院,西安710021)
随着现代化的发展,设备的规模和复杂度越来越高,对设备运行效率的要求越来越高,因此对设备在线故障检测和故障诊断方法有了更高的要求,故障诊断方法的研究越来越受到关注.由于设备故障信息的不确定性,以及故障现象与故障原因之间的复杂的非线性关系,故障诊断的难度越来越高,故障诊断的效率和准确度不高,很需要探索一种新的更方便、更快捷、更可靠的诊断方法,以提高故障诊断的效率和准确度[1].
人工神经网络具有并行处理、非线性映射、学习和自适应性等固有属性,使得人工神经网络可以应用于在线故障诊断领域,解决非线性模式识别问题,适合用于故障现象和故障原因非线性映射关系的复杂故障诊断问题[2-4].
BP神经网络模型是众多神经网络模型中使用最为广泛的一种,其优势是具有较强的非线性映射能力,但是BP神经网络是前向型网络,不是反馈神经网络,因此具有学习收敛速度慢、可能会收敛到局部极小点、学习和记忆稳定性较差等劣势[5-7],另外本质上BP神经网络是静态网络,处理时变环境问题的能力较弱.Elman神经网络是典型的反馈型网络,可以通过增加结构单元对各个样本的相互联系进行学习和记忆,实现动态建模,因此Elman神经网络模型更适合用于在线故障诊断系统[8-9],另外Elman神经网络还具有收敛速度快、精确度高、学习和记忆稳定性较好等优点[9-10],在文献[5]中就体现了其精度高的优点.文中通过Matlab建模仿真提出一种基于Elman神经网络模型的故障诊断方法,并与基于BP神经网络的故障诊断方法进行比较,通过诊断结果比较得出Elman神经网络在收敛速度和精确度方面的优势.
1 故障诊断系统描述
为了实现对设备工作状态的实时检测,便于在故障发生时进行故障诊断,将故障诊断Agent嵌入到诊断设备,实现实时检测诊断设备工作状态中各元件工作电压[11],同时从设备研制单位得到设备正常工作时这些工作点的电压范围,通过对设备工作状态中各元件电压值与设备正常工作时电压值的比较,判断设备工作状态.
1.1 电压采集点设置
设备内部电压采集点设置如图1所示,采集设备内部各元件连接处的电压值V1~V6[12].

图1 设备内部工作电压采集点Fig.1 Voltage acquisition points inside the equipment
1.2 设备故障征兆表示
将电压采集点得到的电压值与设备正常工作时这些工作点的电压范围进行比较,如果在正常范围内,用“1”表示,不在正常范围内,用“0”表示,“*”表示任意值.如:电源输出电压V1如果不在正常范围内,则电源故障,V1如果在正常范围内则电源正常;电源正常的情况下,如果电源电缆的输出端电压V2不正常,则电源电缆故障,如果V2正常,则电源电缆正常,等等,由此得到表1所示设备故障征兆列表,对应电压值V1~V6的正常与否,可快速确定设备内部某个元件是否发生故障.
1.3 设备故障征兆编码
根据表1设备故障征兆列表可知,设备故障诊断输出共有7中状态,其中包含正常状态和6中故障状态,因此可以使用3位2进制表示,比如000表示设备工作正常,001表示设备电源故障等,设备故障征兆编码见表2.
1.4 设备故障样本
故障样本来自设备工作过程中的故障信息,针对图1所示电路中的6个采集点采集其工作电压,因为各采集点采集到的电压值都会存在一定的误差,所以设定容差为10%.然后对各节点处的工作电压进行归一化处理后得到各种典型故障特征值V1~V6表示6个采集点,采集到的故障特征值,作为神经网络的训练样本.部分故障特征值样本见表3.
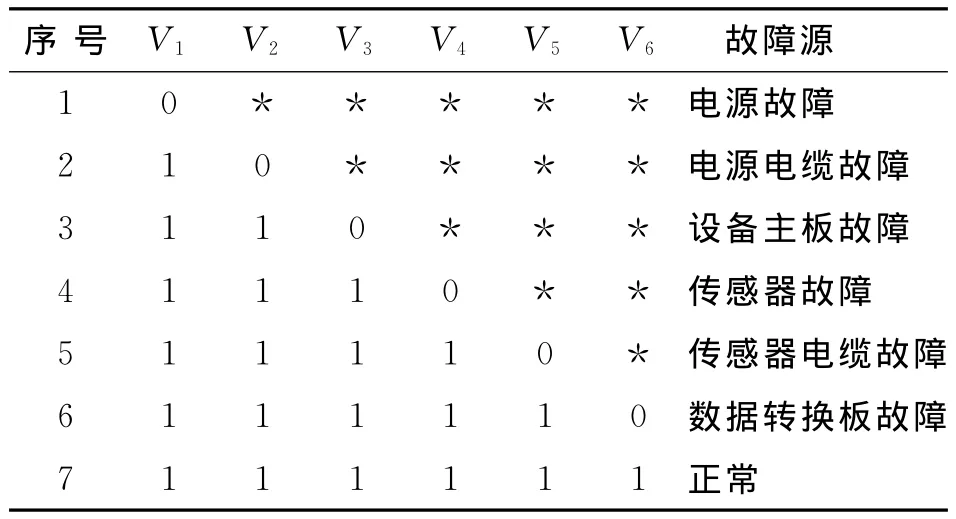
表1 设备故障征兆列表Tab.1 Equipment fault symptoms list

表2 设备故障源编码Tab.2 Equipment fault source codes

表3 部分故障特征值样本Tab.3 Samples of part of fault characteristic value
2 神经网络模型和故障诊断方法
2.1 BP神经网络和基于BP神经网络的故障诊断方法
BP神经网络是误差反向传播神经网络,其可以实现从输入到输出的任意复杂的非线性映射关系,并且具有良好的泛化能力.BP神经网络可以实现复杂的非线性映射关系,因此可以很好的解决现代复杂设备故障源和故障现象之间的复杂非线性映射关系[13-14].
BP神经网络有输入层、隐含层和输出层3层组成,每一层都有若干个节点,也就是若干个神经元,相邻层之间由权连接,最常见也是最基本的BP神经网络是三层结构,如图2所示.
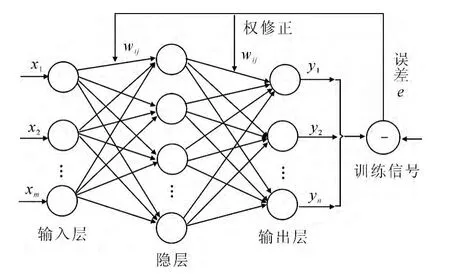
图2 BP神经网络结构Fig.2 The structure of BP neural network
故障诊断过程就是将故障特征向量集合映射到故障集合空间,因此故障诊断问题的实质就是寻找一种比较好的故障映射关系.基于BP神经网络的故障诊断方法就是用具体的BP神经网络构建故障映射关系.文中采用3层的BP神经网络,输入层接收故障信息,单元个数表示故障的特征参数个数,隐含层根据输入层提供的故障信息进行学习,将收敛后各节点的阈值和网络的连接权值保存下来,输出层神经元个数由故障种类数决定[15].
利用BP神经网络进行故障诊断,需要确定BP网络的结构,因为要采集6个节点的电压值,抽取出6个故障特征参数,因此网络的输入层神经元个数为6,输出层为3个神经元,表征6种故障和正常状态共7种输出状态,7种输出状态编码见表2.
2.2 Elman神经网络和基于Elman神经网络的故障诊断方法
Elman网络模型与BP网络模型不同是一种反馈神经网络,是一种反馈动力学系统,比前向神经网络具有更强的计算能力[16].Elman网络可以看作是一个具有局部记忆单元和局部反馈连接的前向神经网络.Elman网络反馈体现在其自身结构模型中的承接层,该承接层使得Elman网络模型具有了记忆功能,对历史数据具有敏感性,联想记忆能力的增强提高了网络的稳定性和收敛速度,网络的稳定性提高后在一定的程度上可以使得网络的精确度提高,另外联想记忆能力也使得模型更能处理动态信息,更适合应用于在线故障诊断,更能处理时变环境问题[17-18].
Elman神经网络一般分为4层:输入层、隐含层、承接层和输出层,其输入层、隐含层和输出层的功能作用类似于BP神经网络,输入层的单元接收外部信号输入,输出层单元输出网络结果,隐含层完成网络训练.但不同于BP神经网络的是在这种网络中,除了普通的隐含层外,还有一个特别的承接层,该层从隐含层接收反馈信号,每一个隐含层节点都有一个与之对应的承接层节点连接.承接层的作用是通过联接记忆将上一个时刻的隐含层状态连同当前时刻的网络输入一起作为隐含层的输入,相当于状态反馈.隐含层的传递函数可采用某种线性或者非线性函数[19-20].Elman神经网络的结构图如图3所示.
因为基于故障诊断问题的实质就是寻找一种比较好的故障映射关系,所以基于Elman神经网络的故障诊断方法就是用具体的Elman神经网络构建故障映射关系.

图3 Elman神经网络结构Fig.3 The structure of Elman neural network
文中采用单隐含层的Elman神经网络,依据诊断系统可以得出故障特征参数是6维的,因此输入层神经元个数为6个,诊断结果输出是3维的,因此输出层神经元个数为3个,表征6种故障源和正常状态共7种输出状态,输出状态编码见表2.
3 实验仿真
在本实验仿真中设定误差目标为0.001.用诊断设备提供的故障样本作(故障样本见表3)为神经网络模型的训练样本,通过Matlab仿真确定BP神经网络和Elman神经网络的结构,最后分析比较基于BP神经网络诊断方法和基于Elman神经网络故障诊断方法对待测故障值样本的诊断输出.
3.1 BP神经网络训练
使用表3中的故障特征值样本对BP神经网络进行训练,进行32次训练后,误差小于0.001,满足训练要求.通过训练结果得知BP网络中间层节点个数为17个.训练效果如图4所示.

图4 BP神经网络训练Fig.4 BP neural network training
3.2 Elman神经网络训练
同样地使用表3中的训练样本对Elman神经网络进行训练,在Matlab仿真过程中,经过11次训练,误差小于0.001,网络训练达到要求,最终确定Elman神经网络隐含层神经元个数为11个,训练结果如图5所示.

图5 Elman神经网络训练Fig.5 Elman neural network training
根据图4和图5可知,BP神经网络训练32次后误差达到要求,而Elman神经网络训练11次后误差达到要求,Elman神经网络的收敛速度比BP神经网络提高了约2倍.
3.3 BP网络诊断结果和Elman网络诊断结果对比
对诊断设备的6个采集点采集其工作电压,归一化处理后得到典型特征参数值样本,抽取7组作为测试样本,涵盖6中故障源和正常状态共7种工作状态,测试样本与期望输出见表4.期望输出法及基于BP神经网络和Elman神经网络的两种故障诊断方法诊断结果见表5.
根据表5可知,BP网络实际输出与期望输出之间的平均误差为0.017 0,Elman网络的实际输出与期望输出之间的平均误差为0.007 2,Elman网络的输出误差明显小于BP网络的输出误差.从诊断输出与期望输出之间的误差分析可知,Elman网络的精确度比BP网络提高了约1.5倍.
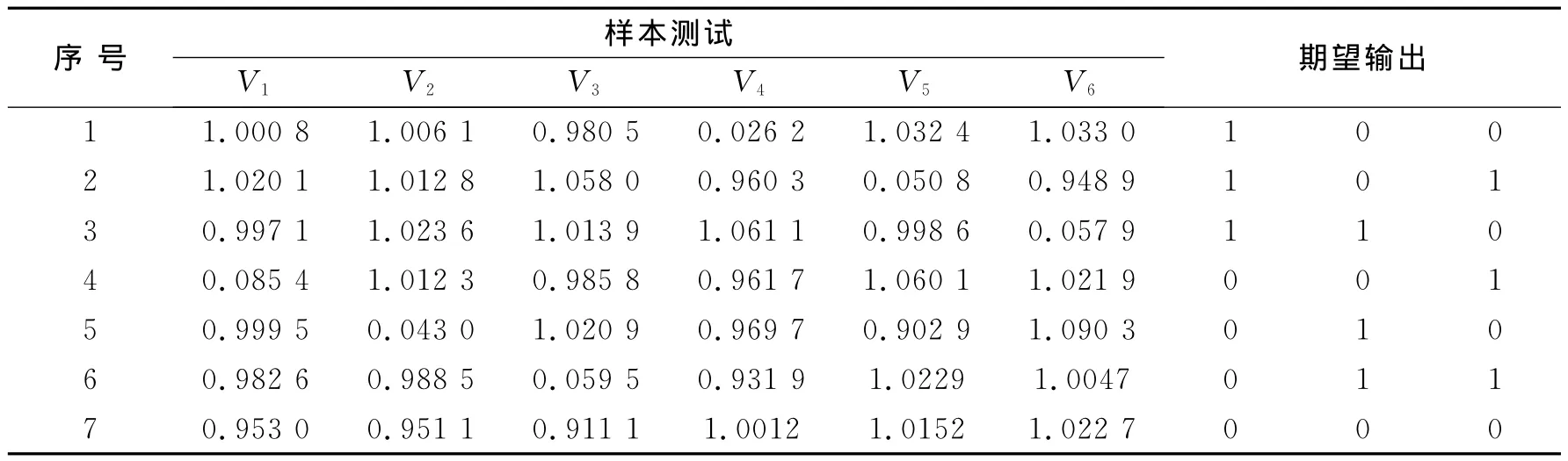
表4 测试样本和期望输出Tab.4 The test samples and the expected outputs
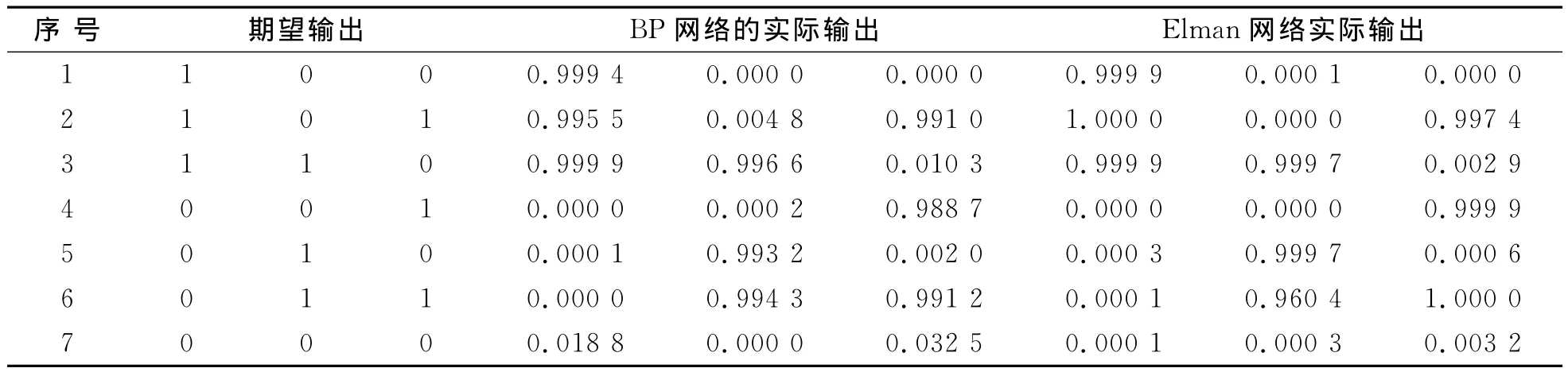
表5 期望输出及两种网络实际输出Tab.5 The desired output and the actual output of the two network
4 结 论
通过对故障诊断设备各采集点的采集数据进行处理后得到故障样本,用BP神经网络和Elman神经网络两种不同神经网络构建故障特征与故障之间的映射关系.然后对两种网络的训练过程和测试结果进行比较,可以得出以下结论
1)从Matlab仿真效果可以得知,网络训练过程中Elman神经网络比BP神经网络具有更快的收敛速度,训练次数减少,BP网络的训练次数是Elman网络的训练次数的3倍,Elman收敛速度比BP网络收敛提高了约2倍.
2)网络测试结果分析表明,基于Elman神经网络的故障诊断方法提高了故障诊断的精确度,降低了诊断误差,从实际故障诊断输出可以看出,基于Elman神经网络的故障诊断方法输出结果平均误差小于基于BP神经网络的故障诊断方法输出结果的平均误差.
3)基于Elman神经网络自身的内部回馈网络使得该网络具有更强的处理动态信息的能力,更适合于在线故障诊断.
[1] 齐继阳,竺长安.设备故障智能诊断方法的研究[J].仪器仪表学报,2006,27(10):1270.QI Ji-yang,ZHU Chang-an.Research on Intelligent Fault Diagnosis Method of the Equipments[J].Chinese Journal of Scientific Instrument,2006,27(10):1270.(in Chinese)
[2] 韩力群.人工神经网络理论、设计及应用[M].北京:化学工业出版社,2007.HAN Li-qun.Artificial Neural Network Theory,Design and Application[M].Beijing:Chemical Industry Press,2007.(in Chinese)
[3] 闻新,周露.神经网络故障诊断技术的可实现性[J].导弹与航天运载技术,2000,(2):17.WEN Xin,ZHOU Lou.Reality for NN Fault Diagnosis Technology[J].Missilfs and Space Vehicles,2000,(2):17.(in Chinese)
[4] 陈如清.两种基于神经网络的故障诊断方法[J].中国电机工程学报,2005,25(16):112.CHEN Ru-qing.Ccomparison Between Two Fault Diagnosis Methods Based on Network[J].Proceedings of the CSEE,2005,25(16):112.(in Chinese)
[5] 陈小明,洪军,阎海梅,等.基于Elman神经网络的振镜扫描系统误差校正技术研究[J].西安交通大学学报,2006,40(5):587.CHEN Xiao-ming,HONG Jun,YAN Hai-mei,et al.Study of Error Correction in Dual Galvanometer Scanning System Based on Elman Recurrent Neural Network[J].Journal of Xi’an Jiaotong University,2006,40(5):587.(in Chinese)
[6] 贾文铜,周瑞祥,张忠,等.基于Elman神经网络的齿轮故障诊断研究[J].计算机测量与控制,2012,20(5):1173.JIA Wen-tong,ZHOU Rui-xiang,ZHANG Zhong,et al.Research on Gear Fault Diagnosis Based on Elman Neural Netaork[J].Computer Measurement & Control,2012,20(5):1173.(in Chinese)
[7] 谢香峰,雷电,孙承波.基于BP网络的开关电源故障诊断方法研究[J].电子测量技术,2012,35(8):11.XIE Xiang-feng,LEI Dian,SUN Cheng-bo.Research of Fault Diagnosis Method of Switch Power Supply Based on BP Neural[J].Electronic Measurement Technology,2012,35(8):11.(in Chinese)
[8] EKICI S,YILDIRIM S,POYRZA M.A Transmission Line Fault Locator Based on Elman Recurrent Networks[J].Applied Soft Computing,2009,9(1):341.
[9] PHAM D T,LIU X.Training of Elman Networks and Dynamic System Modeling International[J].Journal of Systems Science,1996,27(2):221.
[10] 汤宝平,习建民,李峰.基于Elman神经网络的旋转机械故障诊断[J].计算机集成制造系统,2006,16(10):2148.TANG Bao-ping,XI Jian-min ,LI Feng.Fault Diagnosis for Rotating Machinery Based on Elman Neural Network[J].Computer Integrated Manufacturing Systems,2006,16(10):2148.(in Chinese)
[11] 盛兆顺,尹琦岭.设备状态检测与故障诊断技术及应用[M].北京:清华大学出版社,2005.SHENG Zhao-shun,YIN Qi-ling.Equipment Status Inspection and Fault Diagnosis Technology and Its Application [M].Beijing:Tsinghua University Press,2005.(in Chinese)
[12] 耿朝阳,刘德明.嵌入式装备故障诊断专家系统[J].西安工业大学学报,2013,33(11):889.GENG Chao-yang,LIU De-ming.Embedded Fault Diagnosis Expert System in Equipment[J].Journal of Xi’an Technological University,2013,33(11):889.(in Chinese)
[13] 黄文生,李东侠,陆卫忠.基于BP神经网络的故障诊断仿真研究[J].电子工程师,2006,32(06):51.HUANG Wen-sheng,LI Dong-xia,LU Wei-zhong.Emulation Study of Fault Diagnosis Based on BP Neural Network[J].Electronic Engineer,2006,32(6):51.(in Chinese)
[14] 何尔利,翟正军.基于退火BP神经网络的模拟电路故障诊断方法[J].计算机测量与控制,2010,18(1):67.HE Er-li,ZHAI Zheng-jun.Fault Diagnosis of Analog Cricuit Based on Simulated Annealing BP Neural Network[J].Computer Measurement & Control,2010,18(1):67.(in Chinese)
[15] 飞思科技产品研发中心.神经网络理论与 Matlab7实现[M].北京:电子工业出版社,2005.Fei-Si Technology Product Research and Development Center.The Neural Network Theory and Matlab 7Realize[M].Beijing:Publishing House of Electronic Industry,2005.(in Chinese)
[16] 韩旭明.Elman神经网络的应用研究[D].天津:天津大学,2006.HAN Xu-ming.A Study on Application of Elman Neural Network[D].Tianjin:Tianjin University,2006.(in Chinese)
[17] 赵琦,刘开第,庞彦军.Elman神经网络训练方法及其在非线性系统辨识中的应用[J].煤矿机械,2005(5):73.ZHAO Qi,LIU Kai-di,PANG Yan-jun.A New Training Method of Elman and It’s Application Investigation in System Identification[J].Coal Mine Machiner,2005(5):73.(in Chinese)
[18] ELMAN J L.Finding Structure in Time[J].Cognitive Science,1990,14(2):179.
[19] 张德丰.Matlab神经网络应用设计[M].北京:机械工业出版社,2009.ZHANG De-feng.Matlab Neural Network Application Design[M].Beijing:China Machine Press,2009.(in Chinese)
[20] 丁硕,常晓恒,巫庆辉,等.基于Elman神经网络的传感器故障诊断研究[J].国外电子测量技术,2014,33(4):72.DING Shuo,CHANG Xiao-heng,WU Qing-hui,et al.Study of Sensor Fault Diagnosis Method Based on Elman Neural Network[J].Foreign Electronic Measurement Technology,2014,33(4):72.(in Chinese)
【相关参考文献链接】
王林艳,李蔚,王党利,等.非线性机械故障诊断的核分布粒子滤波方法[J].2010,30(5):433.
王志,吴红芳.基于非线性自适应观测器的飞机操纵面故障诊断[J].2011,31(3):267.
刘仲宇,田素林,李明.吊舱环控系统的多级流模型故障诊断技术研究[J].2011,31(4):382.
杨盛泉,巩万福,孟栋轩,等.石油输油泵撬装置故障诊断专家系统的研究 [J].2013,33(3):187.
耿朝阳,刘德明.嵌入式装备故障诊断专家系统 [J].2013,33(11):889.
刘白林,陈国一,邹会云.类间距节点优化DDAGSVM 算法在多故障诊断中的应用[J].2014,34(5):369.
杨正强,杜随更,权冬,等.C800型摩擦焊机润滑系统的检测状态主导故障诊断方 [J].2014,34(12):986.耿朝阳,王宏见,谢安明.嵌入式故障诊断专家系统的M/Qt转换及实现[J].2014,34(5):373.
王志,吴红芳.基于小波神经网络补偿的飞艇滑模控制[J].2011,31(5):465.
刘彩红.BP神经网络学习算法的研究[J].2012,32(9):723.
应晓峰,陈桦.基于耦合人工神经网络的工业材料选择与决策方法研究[J].2012,32(11):913.
国蓉,吴君.模糊小波神经网络在现役油田玻璃钢管的运行风险评价[J].2012,32(12):980.
张荷芳,薛静云.压力传感器温度补偿的BP神经网络算法 [J].2013,33(2):163.
谭宝成,马天力.无人车运动稳定性的模糊神经网络PID控制 [J].2013,33(4):334.
党江艳,黄越.BP神经网络在企业作业链优化中的应用[J].2014,34(7):575.
刘萍萍,马昱阳.小波神经网络的大坝变形预测研究[J].2014,34(11):886.
猜你喜欢
一重技术(2021年5期)2022-01-18
电子制作(2019年19期)2019-11-23
电子制作(2019年24期)2019-02-23
中学生数理化·中考版(2018年10期)2018-12-07
电子制作(2018年10期)2018-08-04
中学生数理化·中考版(2016年10期)2016-12-22
电子制作(2016年21期)2016-05-17
重型机械(2016年1期)2016-03-01
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
海军航空大学学报(2015年4期)2015-02-27