
水下地形GPS测量实施办法
2015-02-07 07:44:31赵瀛舟
地理空间信息 2015年4期
赵瀛舟
(1.中国长江三峡集团公司 测量中心,湖北 宜昌 443133)
水下地形GPS测量实施办法
赵瀛舟1
(1.中国长江三峡集团公司 测量中心,湖北 宜昌 443133)

介绍了利用GPS手段进行水下地形测量的方法,对GPS的技术发展和测深仪的测深原理及现场测量方法、导航定位、测量数据后处理等进行了阐述,该测绘技术将在我国的水电工程施工中发挥非常重要的作用。
水下地形;GPS;测深仪;测量
水下地形图是以高程和水下等高线表示水下地貌变化的,水下地形测量需在水上进行动态定位和测深,作业比陆上地形测量困难。水下地形图不仅是水利水电工程勘测设计的重要基础资料,还在监测桥梁安全、观测水库淤积、防洪抗旱、河道治理等方面发挥着作用。三峡工程中,水下地形图在大江截流、围堰拆除、航道清淤等工作中有着广泛的使用。
1 GPS水下地形定位方法
1.1 GPS RTK定位方法
根据测站的运动状态,GPS定位方法分为静态和动态两种,动态GPS大多采用GPS RTK定位。具体工作时,在一个已知坐标点上设置基准站,基准站对在视场的GPS卫星(一般需要4颗以上)进行连续跟踪测量,并按规定的时间间隔,实时地把载波相位观测值及测量坐标信息等数据通过无线数据链传送给流动站,流动站利用收到的信息和采集的GPS观测值进行求差解算,组成差分观测值进行实时处理,消除或减小星历误差、星钟误差、大气层延迟误差等公共误差,从而获得高精度的位置坐标。
1)GPS RTK基准站的组成。基准站由GPS接收机、电台及发射天线、直流电源等组成(见图1)。基准站GPS接收机一般安置在已知点上,将GPS接收机与GPS控制面板、GPS电源及电台连接,并对GPS测量模式进行选择,将已知点坐标输入仪器,完成GPS基准站的配置后,由直流电源给电台提供电源。
2)GPS RTK流动站的组成。流动站包括GPS接收机和天线两部分,将GPS接收机与GPS控制面板、GPS电源、天线和笔记本电脑连接,选择测量模式,启动仪器。当接收到卫星信号、电台信号后,测量数据成固定解时,才可以开始工作。

图1 GPS RTK基准站的组成
1.2 CORS系统定位方法
CORS系统是由多个GPS参考站组成的,主要通过Internet和无线通信网络向系统覆盖的服务区内的用户提供参考站坐标和参考站GPS观测数据,用户通过Internet下载CORS若干参考站数据,进行精密定位,也可以接收数据播发站对载波相位观测数据进行实时精密定位。建立CORS系统主要依靠GPS技术、数据通信技术和计算机技术。CORS技术在用途上可以分成单基站CORS和多基站CORS。
1) 单基站CORS系统由GPS参考站(基站)、数据服务器、网络通信模块(Internet)和流动站组成。GPS参考站(基站)与数据服务器之间用电缆连接,数据服务器登录Internet后,基准站可以每天24 h连续不断地运行。以南方CORS为例,在基站25 km范围内,只要能够接收到卫星信号、手机信号的地方,移动站就可以进行高精度测量。单基站的组成如图2所示。
2)多基站CORS是指分布在一定区域内的多台连续观测站,每个观测站都是1个单基站,同时每1个单基站还有1个中央控制计算机。由控制软件自动计算流动站与基站点的距离,将距离近的基准站的基站差分数据发送给流动站。湖北省宜昌市已建设了以宜昌主城区、秭归、长阳、远安和枝江5个连续运行参考站多基站CORS系统,平均站间距约42 km,覆盖面积约1万多km2。
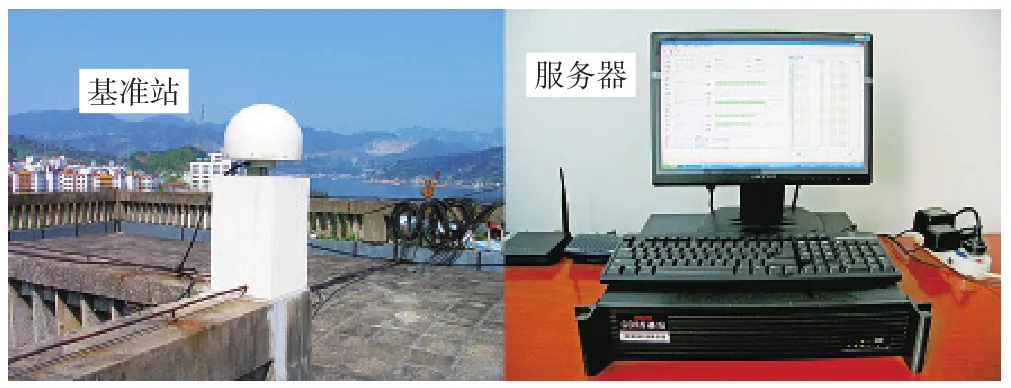
图2 单基站的组成
2 回声测深仪的介绍
2.1 回声测深原理
回声测深仪由发射机、接收机、发射换能器、接收换能器、显示设备和电源组成。水深测量经历了测绳重锤测量(点测量)、单频单波束测深(点测量)、双频单波束测深(点测量)、多波束测深(面测量)、机载激光测深(面测量)几个阶段。回声测深原理是利用安装在测量船下的发射机换能器,垂直向水下发射一定频率的声波脉冲,以声速C传播到水底,经反射或散射返回,被接收机换能器接收。设经历时间为t,换能器的吃水深度D,则换能器表面至水底的距离,即水深H为:
2.2 回声测深作业过程
1)回声测深仪的安装连接。测深仪的声系统一般安装在船舷侧,船舶航行时产生的气泡和漩涡,会严重影响测深能力,因此声系统必须安装在没有进出水管、船壳附近水流平缓、不发生扰动影响的部位,一般选择在距船艏1/3~2/5处。换能器放入水中的深度在连接杆长度允许的前提下,尽可能深一些,大致在0.5~1.2 m范围内。换能器导流罩“钝”的一头朝船艏,“尖”的一头朝船尾。现场测量时,测深仪的连接设备有换能器、12 V直流电源、电脑等。
2)回声测深仪设置。测深仪连接好后,量取吃水线(换能器面到水面的距离)和淡水的温度,根据水温参考表,获得声速值进行设置。启动测深仪,选择测深范围的倍乘开关至“*1”档时,量程开关各档面板所标的数据即为实际的测深范围。通过吃水、声速按钮对吃水、声速进行设置,调整并校验设置零点位置。测深仪设置好后,所测水深一般应使用测绳重锤测量进行复核,满足要求后才能进行测量。
3 现场测量
3.1 坐标系的转换
在GPS测量中,GPS数据通常采用WGS84坐标系统,利用RTK技术进行GPS测量时,首先需要转换成地方独立坐标系统,这是项非常重要的工作,转换参数精度的高低直接影响测量成果的精度。坐标转换时要注意,求解坐标转换参数所使用的已知控制点(通常称为基准点)的精度、密度及分布状况对坐标转换参数的求解质量有着直接影响。因此,所选定的基准点要求精度要高,并且应均匀分布。基准点的数量视测区的大小一般取3~6个为宜。
3.2 测量前的准备过程
3.2.1 工程项目的建立及计划线的绘制
进行水下地形测量时,首先需要使用导航软件进行导航定向。
1)建立工程:输入文件名称、保存路径、设置坐标系参数。
2)布设计划线:根据测量范围和水流流向,进行计划线的布设。计划线可以在CAD中画好,打碎后导入软件中,也可以在软件中进行设置。该软件的布设方式有全屏布线、区域布线、航道布线。一般采用航道布线,输入航行控制点、航道间距、航道长度,就可以绘制出计划线。
3.2.2 通信参数的配置
1)GPS通信参数配置时需要注意设备型号、设备端口常数要和仪器的设置一致,其配置界面见图3。

图3 GPS通信参数配置界面
2)测深仪参数配置不仅要求设备型号、设备端口常数和仪器的设置一样,还需要注意在进行水下地形测量时,一定要选择“使用”,否则,没有水深记录数据。GPS数据的采集,GPS值最好是固定解,有困难时,可以使用差分解(见图4)。
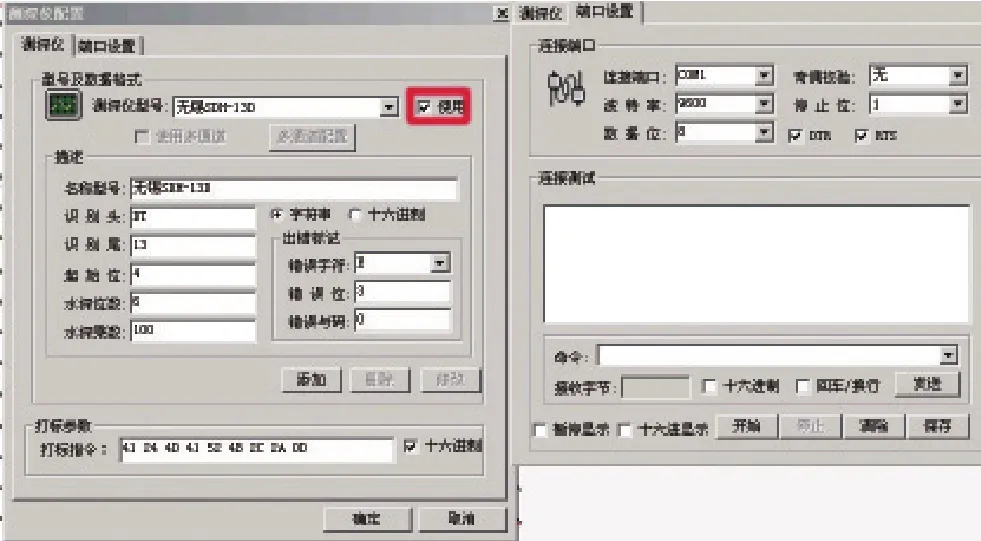
图4 测深仪通信参数的配置
3.3 水下地形测量过程
进行水下地形测量时,首先连接主要设备,然后进行测量。1)水深检测,利用测深锤和测量水深进行对比。2)平面位置检测,利用全站仪测量船只固定时GPS接收器的坐标,并进行对比。
3)进行测量时,首先进入测量界面,按界面显示的船只位置,布设计划线路,然后选定计划线路进行测量,最好每条测线保存1个文件,并读取测量时的水位标尺和观测时间。测量时,界面会显示当时的很多信息,需要随时注意查看。
3.4 后期处理及绘图
根据测量断面,打开文件,通过采集水深取样界面,可以逐条检查测量断面,将突变的数值进行处理。通过观测测量时的水深,对水下高程进行改正并导出测量数据。利用绘图软件进行水下地形图的绘制,等深线用虚线表示。
4 技术拓展
GPS RTK、测深仪和导航软件进行水下地形测量技术已经非常成熟。随着CORS技术的发展,测量范围越来越广,水下地形导航测量原理同样适用于陆地测量,我们对此进行了初探和实验。在比较开阔的路线测量中,可以使用车载GPS测量,由于路面比较平坦,车速均匀,精度高于水下测量成果。基准站采用CORS单基站,在车顶布置GPS接收机(图5),可以进行三峡坝区及专用公路整个施工区的测量工作。作业前,用水准仪准确测定路面至GPS接收机的距离,用来设置天线高,根据测量水下地形测量方法和注意事项,可得到理想的测量成果。此技术同样适用于大范围、视野开阔、比较平坦地区的地形测量,只要把GPS接收机的载体进行更换,使用更方便于工作现场的交通工具就可以极大地提高工作效率。

图5 车载GPS测量图
5 结 语
经过多年的测量实践,GPS测量水下地形确实能极大地提高工作效率。随着我国“北斗”导航系统服务的提供,GPS测量技术将在水电工程施工中发挥非常重要的作用。
[1] DL/T5173-2012.水利水电工程施工测量规范[S].
[2] 张正禄.工程测量学[M].武汉:武汉大学出版社,2004
[3] 梁开龙.水下地形测量[M].北京:测绘出版社,1995
[4] 刘基余.全球定位系统(GPS)的原理与数据处理[M].北京:测绘出版社,1996
[5] 李华,陈勇,张振宇.CORS的发展状况和建立CORS的必要性[J].信息技术,2009(5):123-125
[6] 魏瑞娟,李学军,任维成,等.单基站CORS的建设与应用研究[J].测绘通报,2010(6):23-26
[7] 陈超,郝鸿亮.测深仪配合RTK在水下测量中的应用[J].测绘与空间地理信息,2017(4):135-137

表1 变化检测结果
其中,检测概率为5 318/6 006=0.885 4;虚警率为368/31 092=0.011 8;漏警率为688/6 006=0.114 6;检测误差为0.011 8+0.114 6=0.124 6;Kappa系数为0.924 1。
3 结 语
从本文实验得到的变化检测结果来看,基于快速独立分量分析法的变化检测具有较高精度。快速独立分量分析可以看作是PCA的一种扩展,它将数据变换到相互独立的方向上,使经过变换所得到的各个分量之间不仅正交而且相互独立,是一种处理高阶统计的数据分析方法,能够消除影像间的高阶相关,适合遥感图像的变化检测。
参考文献
[1] 崔伟. 多时相遥感图像变化检测算法的研究[D]. 乌鲁木齐:新疆大学, 2012
[2] 范元章. 多时相遥感图像变化检测方法研究[D]. 西安:西安电子科技大学, 2010
[3] 孙青. 基于独立成分分析的遥感影像变化检测[D]. 南京:南京林业大学, 2012
[4] 杨晓丽. 多时相遥感影像的变化检测[D]. 西安:西安电子科技大学, 2011
[5] Marchesi S, Bruzzone L. ICA and Kernel ICA for Change Detection in Multispectral Remote Sensing Images[C].Geoscience and Remote Sensing Symposium, 2009 IEEEInternational, IGARSS 2009. IEEE, 2009:980-983
[6] Li X C ,Chen J. An Algorithm of Image Fusion Based on ICA and Change Detection[C]. International Conference on Signal Processing, Chengdu, 2004:1 096 -1 098
[7] 李芳芳, 肖本林, 张谦. 基于改进独立分量分析的湿地变化检测方法[J].计算机应用, 2010 (5): 1 347-1 350
第一作者简介:孙喜梅,工程师,研究方向为遥感应用技术。
P229
B
1672-4623(2015)04-0108-03
10.3969/j.issn.1672-4623.2015.04.039
赵瀛舟,工程师,主要从事工程测量技术的研究和应用。
2013-08-23。
猜你喜欢
中国港湾建设(2023年12期)2023-12-27 17:19:58
科学导报(2023年84期)2023-12-17 16:29:04
北京航空航天大学学报(2022年8期)2022-08-31 08:58:30
河北地质(2021年1期)2021-07-21 08:16:12
中国生物医学工程学报(2019年5期)2019-07-16 07:56:46
中南林业科技大学学报(2017年12期)2017-12-19 06:32:55
声学与电子工程(2017年1期)2017-06-22 11:30:06
声学与电子工程(2017年1期)2017-06-22 11:29:57
雷达与对抗(2015年3期)2015-12-09 02:39:00
电源技术(2015年2期)2015-08-22 11:28:12
