
三维激光扫描测量技术在滑坡监测中的应用
2015-02-06 07:58:39王炎城钟焕良石雪冬黄德全
地理空间信息 2015年3期
王炎城,钟焕良,石雪冬,黄德全
(1.广东省水文地质大队,广东 广州 510510;2.广东省国土资源测绘院,广东 广州 510500;3.广东水利水电职业技术学院,广东 广州 510635;4.中山大学,广东 广州 510275)
三维激光扫描测量技术在滑坡监测中的应用
王炎城1,钟焕良2,石雪冬3,黄德全4
(1.广东省水文地质大队,广东 广州 510510;2.广东省国土资源测绘院,广东 广州 510500;3.广东水利水电职业技术学院,广东 广州 510635;4.中山大学,广东 广州 510275)

介绍了三维激光扫描测量的原理并对其理论测量误差进行了分析。采用三维激光扫描技术对广东省五华县崩岗一滑坡进行了6次观测,分析结果表明,三维激光扫描技术与传统的滑坡监测相比具有速度快、精度高、能实时三维动态显示滑坡变化及滑坡量等优点,在实时动态监测中具有广泛的应用前景。
三维激光扫描测量;滑坡监测;误差
1 三维激光扫描测量原理
三维激光扫描测量处理过程包括:数据采集、数据预处理、几何模型重建和模型可视化,它将传统测量方法对单点测量扩展到对目标进行面测量,并且扩展到相对更加复杂的环境中,能将各种复杂、大型、实体的三维数据迅速采集到计算机中,快速构建目标实体的各种几何数据。三维激光测量技术的这一特点,使得高速海量数据成为可能。
三维激光扫描仪发射器发出一个激光脉冲信号,经目标物体表面漫反射后,沿几乎相同的路径反向传回到接收器。可以计算激光点P与扫描仪的距离S,同步测量每个激光脉冲横向扫描角度观测值α和纵向扫描角度观测值β。三维激光扫描测量可以为仪器自定义坐标系,也可以通过标靶点A、B的坐标匹配到P点。X轴在横向扫描面内,Y轴在横向扫描面内与X轴垂直,Z轴与横向扫描面垂直。获得P的坐标(图1),得到目标实体的采样点集合,称之为“点云”。通过面状的“点云”坐标,即可实时反映物体面状的形态及其变化[1-4]。
激光点P的坐标为:

式中,S是通过计算激光从发射到接收之间的传播时间来获得的。假设t为发射脉冲往返时间,目标点P与扫描仪的距离S为:

式中,C为光速。

图1 扫描坐标系
2 三维激光扫描测量误差分析
2.1 距离及角度误差
根据式(1),激光点P的坐标由3个变量构成,根据测量误差传播定律,三维激光扫描测量的直接误差也是由这3个变量(距离S、水平扫描角度α和竖直扫描角度β)引起。
2.2 被观测的物体倾斜引起的误差
三维激光扫描测量系统发射的激光光束有一定的发散角,扫描到目标物体表面形成激光斑点。当被观测的目标物体无倾斜时,设激光斑点大小d、孔径D和激光光束发散角H有以下关系:

式中,S为激光轴线到目标表面的距离。
当物体倾斜时,设S1为激光点到倾斜面点的距离,Q为倾斜角(图2),因倾斜产生的激光测距误差为:

由于激光光束发散角H很小,因此sinH/2≈H/2,目标物体倾斜引起的测距误差为:

简化式(5)得:


图2 物体倾斜
由于三维激光扫描仪出厂时,其激光束的发散角H是经过测定的,是固定值,因此要使测距误差最小,应使目标物体保持立面状态。
2.3 坐标拼接误差
当测量1个目标需要设立n个测站时,要把n个测站测量出来的面状“点云”合并成1个完整的物体“点云”,必须要通过标靶点的坐标与点云坐标进行匹配,从而实现多个面状“点云”的拼接,其实质就是拼接误差(图3)。
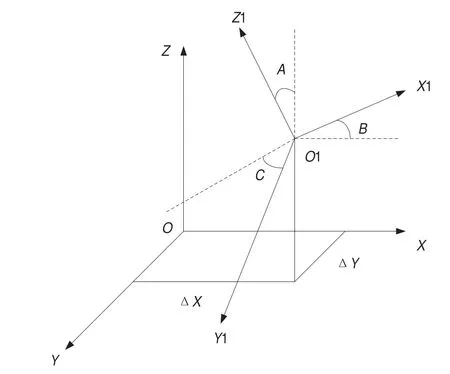
图3 拼接误差引起偏离
设点云坐标向量与坐标轴的交角为A 、B、C,平移参数为ΔX 、ΔY 、ΔZ,则配准模型Ω为:

3 滑坡监测
三维激光扫描技术流程见图4。

图4 三维激光扫描工作流程
2013年5月~2014年8月,使用徕卡ScanStion 2三维激光扫描仪对广东省五华县崩岗进行6次观测。该设备扫描速度5万点/s;扫瞄范围360°×270°;扫描距离400 m;点云密度采用0.3 cm×0.3 cm和2 cm×2 cm间隔。
采用自由设站的方式设置三维激光扫描仪,每次观测设置4个测站(图5),标靶点的放置根据观测环境任意选址,激光点间隔采用0.3 cm×0.3 cm和2 cm×2 cm分别进行监测。
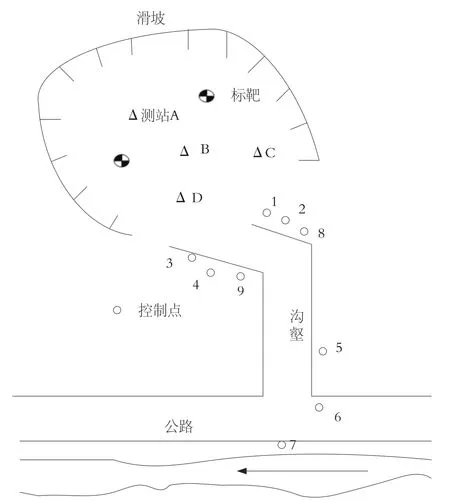
图5 滑坡位置示意图
通过控制测量并平差计算,得出控制点坐标(X,Y,Z)(表1),利用0.5 s、1 s、2 s全站仪发展出标靶点坐标,利用标靶点(图5),把4个测站扫描的滑坡“点云”拼接在一起,得出滑坡模型。根据不同时间观测的滑坡模型,即可在现场计算出滑坡的形状变化、速度变化、泥土总量变化[5]。扫描“点云”拼接后的三维CAD模型见图6。

表1 标靶点坐标

图6 6次观测的滑坡地形变化图
以第1次观测(图6a)的土方量95 800.25 m3为基准,其余5次观测(图6b~f)的土方变量及相对前一次的变化如表2所示。由于采用0.3 cm×0.3 cm的点云密度进行监测,其滑坡地形的变化、土方量的变化精度较高[6,7]。
4 误差分析
全站仪目前的测角精度等级有0.5 s、2 s、5 s,其距离测量采用红外线或激光测量,因此,其水平距离S测量精度较高。当采用相同测角精度的全站仪测量标靶点时,随着测站到被检测滑坡距离的增大,其误差就会越来越大,反之越小。所以,要减少其拼接误差,标靶点的精度要很高,而标靶点的精度又与全站仪的测角精度及观测距离有关。假设全站仪的测角精度为ρ,观测时垂直方向的误差为:

水平方向的误差为:

当ΔV、ΔH超出一定的范围时,滑坡的拼接在纵向、横向就会引起较大误差,无法实现拼接。
图5中测站A距离滑坡大约106 m,而测站D距离滑坡大约210 m。采用0.5 s徕卡全站仪和2 s索佳SET210、索佳SET510全站仪进行观测,其不同距离的理论精度和不同密度引起的实际观测误差变化如表3所示。

表2 土方量变化
分析表3可知,以2013-11-02三维激光扫描监测的滑坡为例,当采用0.5 s全站仪观测标靶点并且三维激光扫描的点云密度采用0.3 cm×0.3 cm时,拼接精度是7 mm,满足100 m内垂直精度4.8 mm和水平方向精度1.0 mm的精度要求,可以实现高精度的拼接(图7a);当距离达到200 m时,垂直方向的理论精度是9.7 mm,相差-2.7 mm,显然在垂直方向无法达到精度要求,即无法在垂直方向上实现拼接,图7b中间位置在垂直方向出现了明显错位;当采用2 s、5 s全站仪且分别采用两种点云密度进行监测时,其拼接精度都可以满足100 m、200 m距离在水平方向的精度要求,但在垂直方向的精度则相差较大,采用100 m水平距离监测时最大误差达到-23.5 mm,而水平距离200 m时,其误差达到-51.5 mm,图7c、7d中间位置垂直方向出现了严重的错位,无法实现拼接。实际分析表明,三维激光扫描的外业工作中,需要考虑距离对监测精度、拼接精度的影响,尽量采用高精度的全站仪观测控制点和标靶点。

图7 全站仪监测
[1] Lemmens M.Shortcomings in Spatial Documentation of Heritage Sites,Laser Scanning Technology Challenged[J].GIM International,2007:25-29
[2] 郑德华,沈云中,刘春.三维激光扫描仪及其测量误差影响因素分析[J].测绘工程,2005(6):25-40
[3] 宋宏.地面三维激光扫描测量技术及其应用分析[J].测绘技术装备,2008(2):40-43
[4] 丁巍.浅述地面三维激光扫描技术及其点云误差分析[J].工程勘察,2009(增刊):447-452
[5] 董玉祥,黄德全.河北昌黎翡翠岛海岸沙丘移动的初步观测[J].中国沙漠,2013(2):486-492
[6] Dong Y X,Huang D Q,Du J H.Observations of Coastal Aeolian Dune Movements at Feicuidao,on the Changli Gold Coast in Hebei Provice[J].Sciences in Cold and Arid Regions,2013(3):324-330
[7] 黄德全,董玉祥,哈斯.海岸横向沙脊的移动与形态变化[J].地理研究,2011(12):105-114

图4 生成背景影像实验

表2 背景影像质量对比
表2说明,用缩小影像代替原始影像用于背景影像的生成,在几乎不会对背景影像的质量造成影响的前提下,总体运算时间降低为原来的8%,大大提高了生成背景影像的效率。由于航空影像的尺寸通常比较大,匀光处理速度慢,因此利用缩小影像代替原始影像生成背景影像的方法可以大大减少匀光处理时间。
参考文献
[1] 李德仁,周月琴,金为铣.摄影测量与遥感概论[M].北京:测绘出版社,2001
[2] 武汉测绘学院航空摄影测量教研组.航空摄影测量学[M].武汉:中国工业出版社,1963
[3] 张祖勋.正射投影技术[M].北京:测绘出版社,1981
[4] Palubinskas G.Muller R,Reinartz P.Radiometric Normalization of Optical Remote Sensing Imagery[J].IEEE International Geoscience and Remote Sensing Symposium,2003(2):21-25
[5] 智长贵.基于航片的正射影像林相图制作及森林测量研究[D].哈尔滨:东北林业大学,2005
[6] 潘俊.自动化的航空影像色彩一致性处理及接缝线网络生成方法研究[D].武汉:武汉大学,2008
[7] Du Y,Cihlar J,Beaubien J,et al.Radiometric Normalization, Compositing,and Quality Control for Satellite High Resolution Image Mosaics over Large Areas[J].IEEE Transactions on Geoscience and Remote Sensing,2001,39(3):623-634
[8] 王晶,王刊生.基于图像分割的数字航空影像匀光[J].地理空间信息,2008,6(1):77-79
[9] 王智均,李德仁,李清泉.Wallis变换在小波影像融合中的应用[J].武汉测绘科技大学学报,2000,25(4):338-342
[10] 贾永红.数字图像处理[M].武汉:武汉大学出版社,2006
[11] 孙明伟.正射影像全自动快速制作关键技术研究[D].武汉:武汉大学,2009
第一作者简介:毛玉龙,工程师,从事测绘技术在城市规划管理中的应用研究。
P258
B
1672-4623(2015)03-0138-04
10.3969/j.issn.1672-4623.2015.03.048
王炎城,高级工程师,主要从事建筑物变形及形变测量,隧道、地铁、地质灾害自动化监测,摄影测量、遥感、水文地质等工作。
2014-12-08。
项目来源:国家自然科学基金资助项目(41071186);广东省水文地质大队科研基金资助项目(SSWD201301)。
猜你喜欢
河北地质(2021年1期)2021-07-21 08:16:08
北京测绘(2020年12期)2020-12-29 01:37:18
工程与建设(2019年3期)2019-10-10 01:40:18
测绘工程(2018年3期)2018-03-20 03:05:12
北方交通(2016年12期)2017-01-15 13:52:59
水利科技与经济(2016年6期)2016-04-22 05:07:30
电测与仪表(2016年9期)2016-04-12 00:29:52
山东青年(2016年3期)2016-02-28 14:25:50
测绘学报(2015年4期)2015-01-14 03:01:28
河南科技(2014年5期)2014-02-27 14:08:32
