
履带式运动平台控制系统的设计
2015-01-28 01:49山西中北大学机电工程学院周小淞张亚刘廷连云飞
河北农机 2015年11期
山西中北大学机电工程学院 周小淞 张亚 刘廷 连云飞
1 引言
世界各地自然灾害和各种矿难事故频发,设计一种能够代替搜救队员,进入复杂、恶劣环境进行搜救的机器人,成为救援机器人的一种趋势。针对履带机器人的研究,国内外做出了不少的成绩,“Aladdin”机器人是日本KazunoriOhno等人为国际地震救援组织和国际防灾救援组织研制的新型履带式救援机器人,其具有很高的机动性、越障性和稳定性,可以应用在多种场合的救援中[1]。2001年,龚进峰等人设计了一套履带式管道机器人双控制系统,该系统运行良好具有很高的可靠性[2]。2003年,王建华等人根据仿人智能控制的基本思想,建立了单片机控制硬件平台,提出了机器人跟踪直线、转弯、准确定位和路线规划的仿人智能控制算法[3]。本文基于传统的履带运动平台设计了一套简单、可靠的控制系统,该系统具有灵活避障、运行平稳的功能,使该履带运动平台能够作为二次开发的一个平台,根据不同的要求实现快速移植,可以大大缩短开发周期。
2 履带式机器人控制系统总体设计
履带式机器人控制系统是在履带式机器人本体结构的基础之上搭建的,其主要是实现控制履带式机器人运动、位姿、轨迹及避障等目标。履带式机器人控制系统的结构简图如图1所示。履带式机器人的控制系统主要由硬件系统和软件系统两大部分组成。

图1 控制系统框架图
2.1 履带式机器人硬件系统设计
履带式机器人控制系统硬件部分的设计主要是采用模块化的设计思想[4],这样既便于安装又容易查找错误,及时维修,为后续履带式机器人的系统调试奠定基础。履带式机器人硬件系统主要包括核心控制板MC9S12DG128模块、电源管理模块、步进电机模块、传感器模块等。
2.1.1 MC9S12DG128核心控制板
MC9S12DG128[5]是由 Freescale公司开发的一款具有16位微处理器的微控制单元,其具有128K字节的Flash存储器,2K字节的EEPROM,8K字节的RAM,8个8位的脉冲宽度调制(PWM)输出通道,2个异步串行通信接口(SCI),1个增强型捕捉定时器模块(ECT),2个8位模拟数字转换器(ADC),2个兼容CAN2.0A/B协议的控制器等。
2.1.2 电源模块
锂电池相对于传统的铅蓄电池来说具有很多优点。首先,相同容量的铅蓄电池重量一般在5kg左右,而锂电池仅为0.45kg。其次,锂电池具有使用寿命长,不易老化,其对环境也没有任何污染等优点。综合考虑选择锂电池作为系统的供电电源。
电源在履带式机器人中主要是为步进电机、单片机及传感器供电,且传感器供电可直接从单片机开发板上获得,因此电源容量大小只需考虑步进电机及单片机即可。然而,单片机的供电电压为12V,步进电机驱动器供电电压为18~30V,故本系统采用12V12AH的锂电池,同时为了能用于步进电机供电,采用两块上述电池串联的形式构成履带式机器人系统所需的24V24AH锂电池组。
2.1.3 步进电机模块
混合式步进电机具有电流小、效率高、运转稳定、噪声低、发热低、反电势较强、自身阻尼好等诸多优点,本文设计的履带式机器人系统采用两相四线混合式步进电机作为驱动电机。
步进电机驱动器是步进电机控制系统中不可或缺的一部分,其性能的好坏直接关系到整个控制系统的优劣,同时它的选取基本上是与步进电机的选取同步进行的。本文步进电机的驱动器选用与其配套的型号为HUISITONGHST-884A的驱动器。图2为步进电机驱动器的基本构成框图,该框图中显示了驱动器的各个主要组成模块,除此之外,驱动器还包括很多的功率放大电路以及辅助电路。
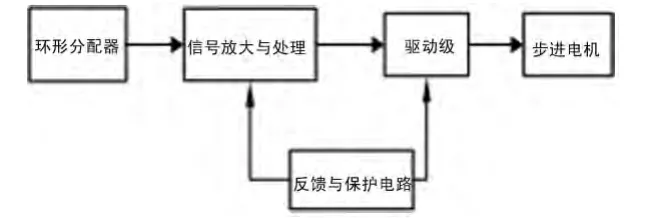
图2 步进电机驱动器构成图
2.1.4 测距、传感器模块
测距传感器模块主要包括超声波传感器和光电传感器两类,且两种传感器都是以测距及避障为目的进行选择的。
(1)超声波传感器
超声波传感器是利用超声波测距原理制作而成的测距传感器,由于超声波具有波长小、功率大、分辨率高等优点,故超声波传感器广泛用于移动机器人的测距和避障中。
超声波传感器进行实时测距时需要一个发射探头和一个接收探头,根据探头工作方式的不同,超声波传感器可以分为自发自收单探头和一发一收双探头两种工作形式。一发一收双探头工作方式能达到较远的测量距离及较好的测量精度,在考虑经济成本的情况下,系统所选用的超声波传感器为双探头的,其工作原理如图3所示。
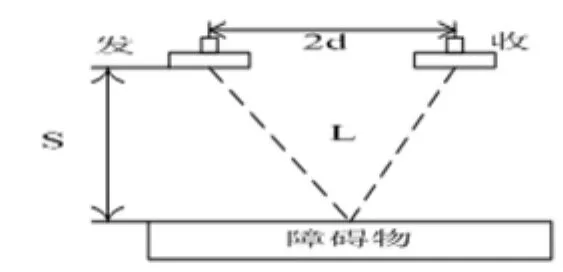
图3 双探头测距原理
(2)光电传感器
光电传感器利用光电组件将被测量进行光信号与电信号之间的转换。光电传感器的检测距离比较短,故系统中将光电传感器作为超声波传感器的补充使用或将其用于检测距离较短的场合,这样既能最大限度地弥补超声波传感器检测不到的位置又能减少超声波传感器的冗余使用。
本文所采用的光电传感器的光源为红外光,因此该传感器也称作红外式光电传感器,其工作原理及外形如图4所示。

图4 红外传感器
(3)传感器的固定
设计原理如图5所示,其中0-7号为超声波传感器固定位置,a-c为光电传感器的固定位置。由于超声波传感器的性能较好,故前端配置了4个超声波传感器,左右各在30°及60°角的方向配置了两个传感器,其他3个是对超声波传感器进行补充的光电传感器。

图5 传感器固定示意图
2.1.5 测速传感器模块
基于传动系统中齿轮布置方式的考虑,为了便于传感器固定与安装,系统选用光电对射计数管作为步进电机的测速传感器。
测速传感器的电路原理如图6所示,主要包括光电对射管、LM393差分比较器及接口引脚等。测速传感器的工作原理为:当光电对射管之间没有物体遮挡时,二极管D2导通,LM393的引脚3输入的电压低于引脚2的电压,差分比较器的输出为0,进而输出到OUT脚,被单片机引脚采集;当光电对射管之间有物体遮挡时,二极管D2不能导通,LM393的引脚3输入的电压大于引脚2的电压,差分比较器输出为1,进而输出到OUT脚,被单片机引脚采集。

图6 测速传感器工作原理
2.2 履带式运动平台软件系统设计
2.2.1 软件系统总体设计及开发工具简介
履带式机器人软件系统是在硬件系统的基础上搭建的,它是整个履带式机器人的运动控制核心,机器人的任何运动及操作都是在软件系统的支持及监控下实现的。通过对履带式机器人的功能进行详细分析,得到履带式机器人软件系统的总体流程如图7所示,履带式机器人软件系统主要包括系统初始化、传感器信息获取、速度PID或模糊PID调节以及避障函数的执行等部分。
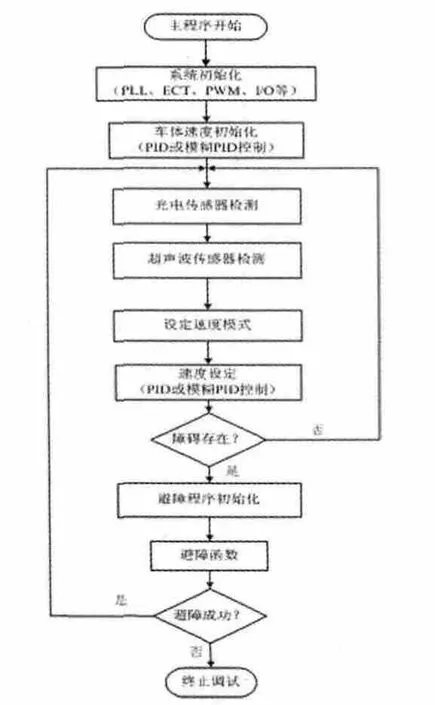
图7 履带式机器人软件系统流程图
2.2.2 步进电机软件系统总体设计
步进电机软件系统是控制步进电机运动的系统,其主要目的是把上述所设计的PID及模糊PID控制用软件实现,以期能达到正确、快速控制步进电机的目的。此系统主要包括速度检测、偏差计算、PID或模糊PID控制量计算以及调节速度等几部分,其主要的软件流程如图8所示。

图8 步进电机软件系统流程图
3 履带运动平台避障算法仿真分析
为了验证其避障的可行性及正确性,在VisualStudio2010的支持下,利用其VisualC++中的MFC(MicrosoftFoundation Classes:微软基础类)编制了如图9所示的履带式机器人避障仿真平台。

图9 履带式机器人避障仿真平台
根据图10可知,ELA避障算法对于椭圆形(圆形)、矩形(正方形)、三角形及不规则多边形等多种类型障碍物共存的避障环境仍具有较好的避障能力,可以较为准确快速地到达目标位置,且可以规划出一条较好的无障碍路径。虽然上述路径可能不是最优的,但是考虑到该算法具有计算量小、耗时短、反应迅速等优点,上述避障仿真结果是可以接受的。

图10 混合障碍仿真分析
4 结论
本履带式运动平台控制系统整体设计分为硬件系统和软件系统两部分来分别进行设计。履带式机器人硬件系统主要包括核心控制板模块、电源模块、步进电机模块及传感器模块等,本文详细地分析了各模块的组成和功能。履带式机器人软件系统的设计主要是软件流程图的分析与研究,同时介绍了软件开发工具CodewarriorIDE及相关初始化程序,然后对步进电机控制系统的软件架构进行了简单分析,通过运动仿真验证了避障算法的有效性。
通过实物运行,验证该控制系统可以实现对履带机器人的运动路线控制,实现灵活地避障,证明该控制系统能够实现对运动平台可靠、稳定的控制。
[1]程常运.杨建国.一种履带式关内机器人控制系统研究[J].机械工程师,2006,3:40-42
[2]OhnoK,MorimuraS,Tadokoro S,etal.Semi-autonomouscontrolof 6-DOFcrawlerrobothavingflippersfor gettingoverunknown-steps[C].IEEE/RSJ InternationalConference on Intelligent Robots and Systems IEEE, 2007:2559-2560.
[3]谭民,徐国华.移动机器人的发展现状及其趋势[J].机器人技术与应用,2001,27(4):322-325.
[4]龚进峰.彭商贤.刘斌,PR-1 履带式管道机器人双控制系统的设计实现[J].制造业自动化,2001.04:23-25.
[5]王建华.高富强,一种履带式行走机器人的仿人智能控制系统[J].自动化仪器仪表,2003.3:9-12
猜你喜欢
电脑爱好者(2020年6期)2020-05-26
科学(2020年3期)2020-01-06
小天使·六年级语数英综合(2018年10期)2018-10-15
电子制作(2018年17期)2018-09-28
北京航空航天大学学报(2017年5期)2017-11-23
电子制作(2017年7期)2017-06-05
光学精密工程(2016年5期)2016-11-07
军事文摘·科学少年(2016年7期)2016-09-20
电子制作(2016年21期)2016-05-17
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
