
深空探测器同波束相位参考成图相对定位方法
2015-01-14 03:03童锋贤李海涛郑为民董光亮李培佳舒逢春
测绘学报 2015年6期
周 欢,童锋贤,李海涛,郑为民,董光亮,李培佳,舒逢春
1.北京跟踪与通信技术研究所,北京100094;2.中国科学院上海天文台,上海200030;3.中国科学院大学,北京100049;4.北京航空航天大学电子信息工程学院,北京100091
随着深空探测任务的拓展,两个或多个探测器相对定位的需求越来越多。嫦娥三号成功落月后,释放出了玉兔号巡视器,在开展两器互拍和月面巡视探测过程中,就需要确定巡视器相对着陆器的位置。我国探月工程第3步月球采样返回也需要对上升器和轨道器进行高精度相对定位,满足两者在月球轨道交会对接[1]。日本月亮女神(SELENE)任务中为了精确测量月球背面重力场,也对两个子探测器进行了相对定位[2]。在探测器进入行星环绕轨道或行星着陆时,利用相对定位的方法可以有效提高定位精度,避免受行星星历不确定性的影响[3]。因为深空探测任务距离地球都很远,所以需要进行相对定位的多个探测器基本都位于测站的同一波束内,可以采用同波束模式进行观测。现有的深空探测器相对定位方法主要是同波束干涉测量(same beam interferometry,SBI)[4-6]。SBI可以有效削弱信号传播路径中的大气、设备等引起的共模误差,测量精度非常高。在阿波罗(Apollo)登月任务中,利用该技术测量的月球车月面行走路线精度达到25m[7];日本SELENE任务中两个子探测器相对定轨精度达到10m量级[8]。SBI的关键就在于求解相位模糊,对于单频信号可以利用地球自转,通过长时间的观测拟合出整周模糊度;对于多频点信号则可以尝试利用频率综合法求解[9]。前者要求观测弧段很长,后者则对探测器下行信标提出了较为苛刻的要求。在类似嫦娥三号这种地外天体表面探测任务中,相对定位还可以利用视觉导航的方法。通过安装在探测器上的相机拍照得到相对位置,在有效工作范围内精度能达到4%(即相对距离1m,测量误差0.04m)[10]。视觉导航的缺点在于作用距离短,嫦娥三号任务中相邻探测点间有效定位距离不能超过10m,非相邻探测点间则需要进行累加定位。
相位参考成图技术源自射电天文观测,最初用于亮度较弱的射电源结构分析[11]。该技术利用邻近致密参考射电源信号的复可见度相位信息修正弱源的复可见度相位,削弱大气和设备等引起的相位抖动和测量误差,有效提高弱源复可见度数据的相干时间和系统灵敏度,降低目标源的观测亮度限制。经过相位校准的复可见度数据保留了弱源和参考射电源的相对位置信息,从中能够求得两个源之间的角距,测量精度可达亚毫角秒(mas)量级[12-13]。若有两个相隔很近的探测器可以在地面测站的同一波束内观测,就能进行同波束相位参考成图,确定两个探测器的相对位置,有效减小共模误差,提高测量精度。
与射电源宽带白噪声信号的特征非常不同,深空探测器信号的带宽较窄,而且探测器相对于天球参考架运动剧烈,射电源却可以视为静止,由此导致探测器观测模型和数据处理方法也不一样。本文第1部分建立了适用于深空探测器信号特点的同波束相位参考成图相对定位模型;第2部分分析了两个主要影响因素;第3部分介绍了玉兔号相对定位结果;最后进行了总结和展望。
1 同波束相位参考成图相对定位模型
1.1 探测器成图原理
探测器信号由其天线发射出来,可以视作一个有面积的圆状信号源。将探测器作为目标源,源面上一点位置矢量为R,其信号电磁波的单色分量场强表示为ε(R)。由传播定理知,空间r1和r2处两个观测点的空间相干函数为[14]

式中,〈·〉表示取一段时间内的平均值;ω为观测信号频率;c为光速;ds1和ds2表示对整个源面积分。假设目标源面上不同位置发出的信号空间不相干,用s表示矢量R的单位方向矢量,目标源亮度分布I(s)为〈ε(R)ε*(R)〉,目标源的面积分元ds转换成天球立体角的积分。因为目标源与天线距离很远可以近似为只保留展开的一阶项得到

建立右手坐标系(u,v,w),其中w指向目标源中心,u指向东西方向,如图1所示。所有距离测量值的单位改用信号波长λ表示,基线r1-r2可以表示为(λu,λv,λw)。s用方向余弦表示为因为目标源的结构在天球面上非常小,所以l和m也很小。空间相干函数在新坐标系下近似为


图1 干涉测量示意图Fig.1 Diagram of the interferometry
式(3)表明如需求解目标源的亮度分布(即对目标源结构成图),需要测量w=0时目标源的空间相干函数,两者成二维傅里叶变换关系。两个测站接收同一目标的信号分别为Aeωt和Aeω(t-τ),其中τ为信号到达两个测站的时延差。在相关处理中,经过时延模型补偿τm后[15],两者的干涉结果为一复条纹[16]

深空探测器距离地球很远时可以近似为一个点源,φ(t)即为残余时延对应的条纹相位,R为幅度。经过条纹拟合进一步剔除残余时延后得到的干涉结果即复可见度值,包含幅度和相位两部分。目标源在图上的位置只与复可见度相位有关[11]。
1.2 同波束相位参考相对定位原理
当两个探测器距离较近,位于地面测站天线的同一波束内时,可以同时得到两个探测器信号的干涉条纹。探测器信号的频点和带宽已知,很容易将两个探测器信号分离开。以探测器L作为参考对象,探测器R为目标对象。经过同一个时延模型补偿后,得到两个探测器的残余条纹相位为

式中,φgeo(t)、φins(t)、φatm(t)和φion(t)分别表示两个探测器残余的几何时延、设备时延、大气对流层扰动和电离层扰动对应的相位值;δφ为相位误差;下标L和R分别表示参考对象和目标对象。利用天文图像处理软件(astronomical image processing system,AIPS)[17]对探测器L的条纹进行拟合,得到与探测器L相关的残余条纹相位φL(t),修正该残余时延后,探测器L的复可见度相位为0。利用此复可见度数据对探测器L进行成图,探测器L将会位于图像的原点处。若将探测器R的残余的条纹相位减去探测器L的残余条纹相位,就可以得到两个探测器的差分相位

因为两个探测器信号传播路径非常近,Δφins(t)、Δφatm(t)和 Δφion(t)近似为零,所以最终的差分相位主要为两个探测器几何位置差引起的相位项Δφgeo(t)。以该差分相位作为探测器R信号复可见度数据的相位并利用差分成图软件(difference mapping program,Difmap)[18]进行成图,就能得到探测器R的相位参考图[10]。探测器R在图上偏离原点的位置反映了两个探测器之间的赤经赤纬差。
2 相对定位影响因素分析
2.1 信号带宽
在建模过程中采用了许多假设条件,其中假设信号为单色电磁场,实际上信号有一定的带宽,会影响成图结果[19]。而且在观测过程中,为了在频域上积分提高信噪比,观测带宽越宽越好。假设观测的信号带宽为Δω,空间相干函数需要对频率进行积分

可以认为频带内信号的增益特性不变,即I′(s,ω)=I(s)G(ω)G*(ω)。随着数字信号采集系统的采用,G(ω)近似为单位实矩形窗函数,则式(8)化简为

式中,τ为信号到达两个测站的时延差。因此信号带宽的影响相当于在真实亮度分布上乘以一个sinc函数。为了减小这种影响,τΔω要尽量小,即最终残留的时延差τ要尽量小。文献[11]中建议sinc函数值大于0.99,这就要求时延模型和条纹拟合精度尽量高。
2.2 UV 覆盖
从式(3)可知空间相干函数测量值与目标源亮度分布之间为二维傅里叶变换关系,但实践中不可能在uv平面的每一个点处都获得空间相干函数的测量值,所以实际测量得到的目标源亮度分布ID(l,m)为

式中,S(u,v)为二元干涉仪在uv平面上的采样函数,即UV覆盖。令S(u,v)的二维傅里叶变换为F(l,m)(又称为脏波束),则ID(l,m)与I(l,m)之间存在卷积关系

UV覆盖越广,则波束主瓣越窄,测量精度越高。只考虑信噪比和UV覆盖时,测量误差可以由式(12)估计[20]

式中,σRA,Dec单位为弧度;SNR 为信噪比;λ为信号波长;D为基线在uv平面赤经与赤纬方向上的等效投影长度。另一方面,uv平面上采样点越多,均匀性越好,则脏波束的特性越好,得到的图像更接近真实目标。在探测器成图中,因为探测器可以近似成点源,所以其结构不是本文所关心的,但差的UV覆盖会导致图像上出现假目标,影响探测器位置的确定。UV覆盖由测站布局和观测时间决定。我国现有主要用于深空任务的测站包括CVN的4个站(北京、上海、昆明和乌鲁木齐)和深空网(Chinese deep space network,CDSN)的两个站(佳木斯和喀什)。以观测射电源3C84(赤经03h19m48s.16,赤纬41°30′42″.10)为例,对整个观测网的UV覆盖和对应形成的脏波束进行仿真,如图2所示:(a)为CVN 4个站1h的UV覆盖,(b)为CVN加CDSN共6个站1h的UV覆盖,(c)为CVN 4个站4h的UV覆盖,(d)为CVN加CDSN共6个站4h的UV覆盖,(e)、(f)、(g)、(h)分别为对应的脏波束。可以看到测站数量越少、观测时间越短,UV覆盖越差,脏波束上旁瓣分量更多且幅度更大,造成的假目标越多。在测站数量少的情况下,增加观测时间,或者在观测时间很短的情况下,增加测站数量,都能改善成图结果。
3 玉兔号巡视器相对定位结果
嫦娥三号着陆器位于月球北纬44.12°,西经19.51°处,高程-2632m(以月球平均半径1740km为参考)。着陆器面朝正南,玉兔号巡视器从着陆器背面分离,然后顺时针方向绕着陆器行驶,以约60°间隔,分别在着陆器正北方向的A点、东北方向的B点、东南方向的C点、正南方向的D和E点5个位置对着陆器进行了环拍。着陆器发射的是5MHz带宽的数传信号,巡视器大部分时间发射的是4kHz带宽的遥测信号,均位于X波段,两者中心频率相差约34MHz,4个CVN测站用2个8MHz带宽的通道分别接收两个探测器的信号。相关处理采用上海天文台研制的软件相关处理机,FFT点数4096,积分时间为0.983 04s[21]。相关处理结果转换为FITS(flexible image transport system,灵活传输图像系统)格式,干涉条纹如图3所示。因为二者信号信噪比很高,条纹拟合精度优于1ns,式(9)中sinc函数值远大于0.99,信号带宽影响可以忽略。在巡视器发送4 kHz带宽的遥测信号时,通道1内也可见清晰的条纹。该条纹是由于着陆器数传信号很强,导致其第12、13和14个旁瓣信号被第1通道接收而形成的。所以通道1的数据中包含了两个探测器的有效信号,只用该通道数据就可以进行成图,避免了通道间特性不一致带来的误差。
采用本文方法处理巡视器位于A点处2.5h的测量数据,得到脏波束、着陆器的成图和巡视器的相位参考图(图4)。可以看到脏波束主瓣比较明显,不会造成目标无法分辨的情况。着陆器位于图像中心,而巡视器与中心有一定偏移,反映了巡视器相对着陆器在观测弧段内的平均赤经赤纬差。因为已经通过其他测量手段获得着陆器在月面百米量级的位置信息[22],所以能直接确定巡视器的赤经赤纬。嫦娥三号着陆区域非常平坦,近似认为两个探测器位于同一水平面内。采用迭代法将巡视器的赤经赤纬转换到着陆器的北东地坐标系内,得到巡视器全向天线相对着陆器定向天线相位中心的位置。修正天线安装位置后,得到两个探测器的机械中心相对位置,并与视觉导航结果进行对比。采用同样的方法处理B、C、D、E点的数据,结果见表1和图5。
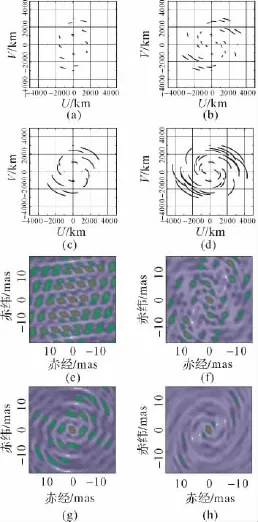
图2 不同测站数量和不同观测时长形成的UV覆盖和对应的脏波束Fig.2 UV coverage and dirty beam for different station numbers and different observation lengths
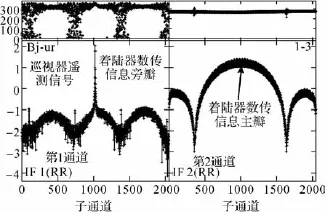
图3 2013-12-15T12:00(UTC),北京—乌鲁木齐基线上两个通道内的干涉条纹(第1通道接收巡视器信号,第2通道接收着陆器信号,上半部分为相位,单位为(°),下半部分为取对数后的幅度)Fig.3 Interferometric fringes of the two probes at 12:00,December 15,2013,baseline Bj-Ur(the first channel is for the rover and the second one for the lander;top part is the phase in degrees and bottom part is the amplitude in logs)

图4 2013-12-15T14:50—17:20(UTC)巡视器位于A点时UV覆盖形成的脏波束、着陆器成图和巡视器的相位参考图Fig.4 Dirty beam,image of the lander and phase-referencing image of the rover when the rover was located at point A,14:50-17:20,December 15,2013

图5 两种方法得到的巡视器环绕着陆器运动轨迹对比Fig.5 Comparison of the path of the rover obtained from two different methods
视觉导航的测量精度约0.4m,同波束相位参考成图结果和视觉定位结果吻合良好,两个方向的偏差均小于1m。若从式(12)分析,假设东西和南北方向基线等效长度分别为7.0×107λ和8.4×107λ,信噪比为5,则本文方法在赤经赤纬方向的误差分别为0.09mas和0.08mas,对应到月面定位误差约为0.17m和0.14m。由于没有考虑观测和数据处理中的误差,所以实际测量误差会更大。上述分析有效验证了同波束相位参考成图用于深空探测器相对定位的可行性和高精度,而且该技术很好地适应了玉兔号巡视器下行遥测窄带信号和着陆器下行数传宽带信号,不需要其他测量信标,减少了对探测器下行信号的要求,这在深空探测任务中具有很大的优势[23]。

表1 巡视器在各个停留点相对着陆器的位置求解结果Tab.1 Relative positions of the rover to the lander at different sites
4 结 论
同波束相位参考成图技术在深空探测领域是一项新的测量技术,其高精度得益于两个方面,一是同波束观测几乎完全消除信号传播路径共模误差;二是该技术利用多个台站同时观测,采用综合口径的方法有效地增大了等效天线口径,提高了分辨率[24]。与传统干涉测量技术不同,该技术直接得到目标的相对位置而不是时延差,但可以反解出时延差用于定轨[15]。此次嫦娥三号试验有效验证了CVN用于航天器同波束相位参考成图的可行性。由于CVN测站数量偏少,需要两个多小时的观测才能取得好的结果。如果加入CDSN的数据,改善UV覆盖,有望缩短观测时间。随着国际空间数据系统咨询委员会(CCSDS)发布深空测量方向的建议书,逐渐统一国际测量数据交换格式,今后各国的深空探测项目将会是一个开 放 和 合 作 的 平 台[25]。欧 空 局(European space agency,ESA)位于澳大利亚新诺舍(New Norcia)和西班牙塞夫雷罗斯(Cebreros)的两个深空站在嫦娥三号探测器进入月球环绕轨道前后参与了联合观测。未来通过与ESA合作,可进一步扩展观测网规模。后续将进一步研究深空探测器非同波束的相位参考成图技术,将其应用到探测器在天球参考架内的绝对定位,为我国未来火星及更远行星探测任务中探测器导航定位提供支持。
[1]OUYANG Ziyuan.Scientific Objectives of Chinese Lunar Exploration Project and Development Strategy[J].Advance in Earth Sciences,2004,19(3):351-358.(欧阳自远.我国月球探测的总体科学目标与发展战略[J].地球科学进展,2004,19(3):351-358.)
[2]LIU Qinghui,KIKUCHI F,MATSUMOTO K,et al.Same-beam VLBI Observations of SELENE for Improving Lunar Gravity Field Model[J].Radio Science,2010,45(2):RS2004.
[3]MARTIN-MUR T J,HIGHSMITH D E.Mars Approach Navigation Using the VLBA[C]∥Proceedings of the 21st International Symposium on Space Flight Dynamics.Toulouse,France:[s.n.],2009.
[4]CHEN Ming,LIU Qinghui,CHEN Guanlei,et al.Calculation of Differential Phases in Same-beam VLBI and Accuracy Verification of DOR Delay[J].Acta Geodaetica et Cartographica Sinica,2013,42(6):817-823.(陈明,刘庆会,陈冠磊,等.同波束干涉测量差分相位计算与DOR时延精度验证[J].测绘学报,2013,42(6):817-823.)
[5]CHEN Shaowu,DONG Guangliang,LI Haitao,et al.Research and Verification of Differential Phase Delay Measurement Model of Same Beam Interferometry[J].Journal of Astronautics,2013,34(6):788-794.(陈少伍,董光亮,李海涛,等.同波束干涉测量差分相时延观测模型研究及验证[J].宇航学报,2013,34(6):788-794.)
[6]CHEN Shaowu,LIU Qinghui,DONG Guangliang,et al.Real-time Differential Phase Delay Resolving of Same Beam VLBI in Lunar Orbiter Rendezvous and Docking[J].Science China:Information Sciences,2013,43(11):1460-1471.(陈少伍,刘庆会,董光亮,等.月球轨道器交会对接同波束VLBI测量差分相时延实时解算[J].中国科学:信息科学,2013,43(11):1460-1471.)
[7]SALZBERG I M.Tracking the Apollo Lunar Rover with Interferometry Techniques[J].Proceedings of the IEEE,1973,61(9):1233-1236.
[8]KIKUCHI F,LIU Qinghui,HANADA H,et al.Picosecond Accuracy VLBI of the Two Sub-satellites of SELENE KAGUYA)Using Multi-frequency and Same Beam Methods[J].Radio Science,2009,44(2):1-7.
[9]QIAN Zhihan,LI Jinlin.Application of VLBI in Deep Space Exploration[M].Beijing:China Science and Technology Press,2012:128-130.(钱志瀚,李金岭.甚长基线干涉测量技术在深空探测中的应用[M].北京:中国科学技术出版社,2012:128-130.)
[10]WU Weiren,WANG Dayi,XIN Yan,et al.Binocular Visual Odometry Algorithm and Experimentation Research for the Lunar Rover[J].Science China:Information Sciences,2011,41(12):1415-1422.(吴伟仁,王大轶,邢琰,等.月球车巡视探测的双目视觉里程算法与实验研究[J].中国科学:信息科学,2011,41(12):1415-1422.)
[11]THOMPSON A R,MORAN J M,SWENSON J G W.Interferometry and Synthesis in Radio Astronomy[M].New Jersey:John Wiley &Sons,2008:50-76.
[12]SHANG Linlin.A Phase-reference Study of Radio Source 3C138and 3C66Band a SVLBI Study of the Blazar Source PKS 1924-29[D].Shanghai:Shanghai Astronomical Observatory,2005:3-5.(商琳琳.射电源3C138和3C66B的相位参考成图与Blazar源J1924-29的空间VLBI研究[D].上海:中国科学院上海天文台,2005:3-5.)
[13]GUO Li,ZHENG Xingwu,ZHANG Bo,et al.New Determination of the Position of the Pulsar B0329+2B54 with Chinese VLBI Network[J].Science China:Physics,Mechanics and Astronomy,2010,53(8):1559-1564.
[14]TAYLOR G B,CARILLI C L,PERLEY R A.Synthesis Imaging in Radio Astronomy II[R].San Francisco:Astronomical Society of the Pacific,1999:1-20.
[15]GUO Li.Reduction of the Instantaneous State Vectors of Spacecraft Based on VLBI Tracking Data[D].Shanghai:Shanghai Astronomical Observatory,2007:51-52.(郭丽.基于VLBI跟踪观测的空间飞行器瞬时状态参量归算[D].上海:中国科学院上海天文台,2007:51-52.)
[16]FOMALONT E.The Processing of VLBA Spacecraft Da-ta[R].Charlottesville,Virginia:NRAO Memorandum,2005:1-9.
[17]GREISEN E,Bridle A.AIPS Cookbook[M].USA:National Radio Astronomy Observatory,2013:213-281.
[18]TAYLORY G.The Difmap Cookbook[M].Pasadena,CA:California Institute of Technology,2013.
[19]ZENSUS J A,DIAMOND P J,NAPIER P J.Very Long Baseline Interferometry and the VLBA[R].San Francisco:Astronomical Society of the Pacific,1995:329-338.
[20]LESTRADE J F,ROGERS A E E,WHITNEY A R,et al.Phase-referenced VLBI Observations of Weak Radio Sources:Milliarcsecond Position of Algol[J].The Astronomical Journal,1990,99(5):1663-1673.
[21]ZHENG Weimin,QUAN Ying,SHU Fengchun,et al.The Software Correlator of the Chinese VLBI Network[C]∥Sixth International VLBI Service for Geodesy and Astronomy,Hobart,Australia,2010:157-161.
[22]HUANG Yong,CHANG Shengqi,LI Peijia,et al.Orbit Determination of Chang'E-3and Positioning of the Lander and the Rover[J].Chinese Science Bulletin,2014,59:3858-3867.
[23]BORDER J S,LANYI G E,SHIN D K.Radiometric Tracking for Deep Space Navigation[C]∥31st Annual AAS Guidance and Control Conference.Breckenridge,Colorado:[s.n.],2008:8-52.
[24]WILSON T L,ROHLFS K,HüTTEMEISTER S.Tools of Radio Astronomy[M].Berlin:Springer,2013:201-203.
[25]Delta-Differential One Way Ranging(Delta DOR)[EB/OL].CCSDS Red Book 506.0-R-0,2009.http:∥cwe.ccsds.org/css/docs/CSS-SM/Meeting%20Materials/2009/April-2009/506x0r0_rev2(DDOR).pdf
猜你喜欢
地理空间信息(2022年11期)2022-11-26
测绘地理信息(2022年2期)2022-04-02
陕西水利(2021年5期)2021-06-21
航天器工程(2019年4期)2019-11-11
小福尔摩斯(2019年2期)2019-09-10
小学生必读(低年级版)(2019年9期)2019-04-13
小学生必读(低年级版)(2019年10期)2019-04-13
伙伴(2019年12期)2019-01-17
北京航空航天大学学报(2017年4期)2017-11-23
中学科技(2015年7期)2015-07-03
