
空间机械臂用低功耗高精度永磁同步驱动系统
2015-01-13 01:54:48赵志国张东宁
微特电机 2015年9期
赵志国,王 真,高 欣,戴 亮,张东宁
(1.中国国防科技信息中心,北京100036;2.中国电子科技集团公司第二十一研究所,上海200233)
0 引 言
随着航天技术的应用和发展以及空间机器人技术的发展完善,空间机械臂在太空探索和开发中发挥着越来越大的作用。空间机械臂在航天员移动工作平台系统、太空垃圾抓捕、辅助交会对接以及空间站建造等系统中有广泛的应用价值,其中空间机械臂的关节控制是空间机械臂系统的关键技术之。图1 为空间机械臂外形图。
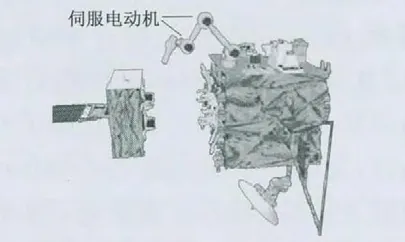
图1 ETS-Ⅶ机械臂外形图
1 基本结构和原理
根据空间机械臂的关节控制系统应用需求,我们研制了一种永磁同步电动机伺服系统。该伺服系统具有较低的转矩脉动和较高的转矩输出能力,并在运行过程中具备优良的低速稳定性和高精度的定位能力,与此同时根据应用特性,伺服系统还应满足相应的体积与重量要求,以为模块化关节提供运动和动力输出。
1.1 机械臂中永磁同步伺服系统的结构
机械臂中电机主要结构形式如图2 所示。
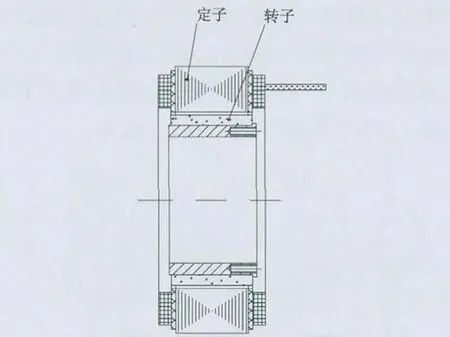
图2 永磁同步电动机结构
该系统中电机采用分装式结构,磁路部分为径向磁路结构,电机通过过渡件与机械关节组装为一体,确保整个机械臂系统体积紧凑同时降低系统的重量。驱动器需要实现对于两个关节的永磁同步电动机的驱动任务,受限于驱动器的空间和功耗等要求,驱动器内部两关节控制器排布于一块电路板上。
1.2 主要工作原理
系统原理框图如图3 所示。
本文中伺服控制器需要实现对于两个关节的永磁同步电机的驱动任务,受限于伺服控制器的空间和功耗等要求,初步拟定伺服控制器内部包含两个DSP 处理器,其中一个实现对于电压的监测和对于单台永磁同步电机的驱动;另一个实现对于两台永磁同步电机的驱动。两DSP 通过RS-422 通信接口实现与上位机的通信。同时电流检测采用高共模电压的精密运算放大器配合分流电阻方式实现。
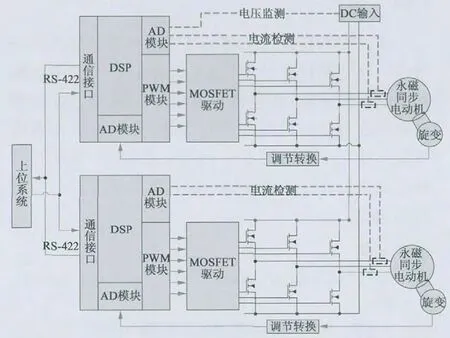
图3 系统原理框图
2 设计研究
针对空间机械臂关节控制对永磁同步伺服系统的要求,本文主要进行了以下设计研究。
2.1 低功耗电机技术设计及仿真技术
采用等效磁路法进行方案估算、初始方案设计和类似方案的比较。根据电机初始参数运用有限元软件建立模型,确立几何模型,设置材料属性和外电路。对建好的模型进行剖分,求解不同工况下电机的运行特性,并对结果进行后处理,根据后处理结果对电机参数进行调整,通过优化极靴,极槽匹配,选择永磁体尺寸,设置绕组结构,分析材料特性等可得最终方案。
电机仿真与优化设计流程图如图4 所示。
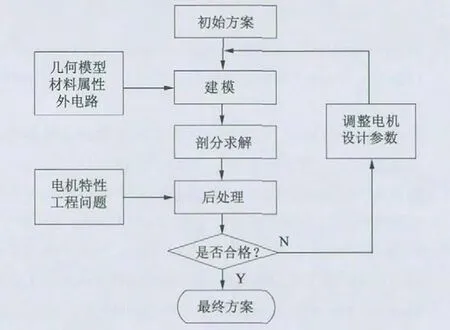
图4 电机仿真与优化设计流程图
本电机拟采用Z =18,2p =12 结构,利用Ansoft 2D 有限元仿真软件对该电机进行建模后划分网格,由于该模型可以看成是由6 个单元电机组成,为减少计算机的工作量,采用单元单机进行分析计算,如图5、图6 所示。
建立模型后,首先计算空载时的各个参数,从而得出磁路仿真图、磁势分布图、空载时齿槽转矩图、相反电势波形图、线反电势波形图。其中,磁路仿真图如图7 所示,可以验证模型的正确性,如磁钢特性,模型边界的设定等;磁势分布图如图8 所示,可以核对该电机各个部位的磁密是否合理;反电势波形如图9 所示,其正弦性是电机性能的重要参数。
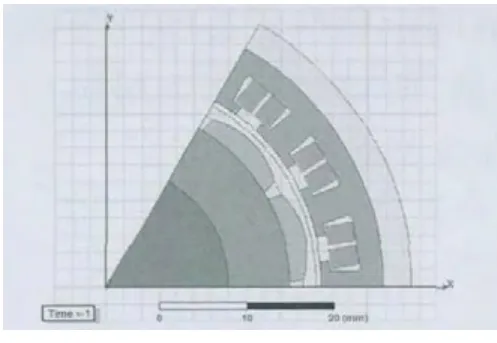
图5 电机结构建模图

图6 电机2D 模型图及网络剖分图
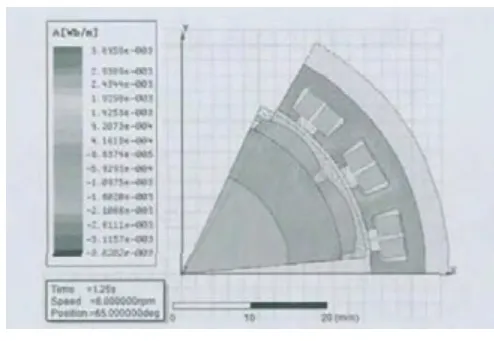
图7 电机磁路仿真图
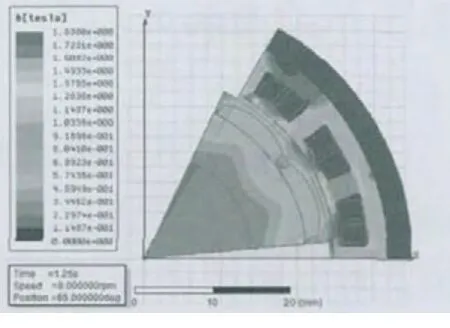
图8 磁密分布图
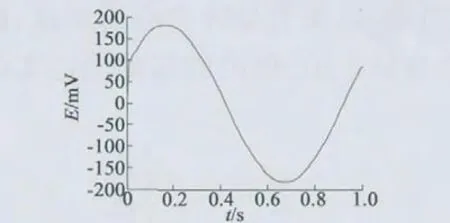
图9 线反电势波形图
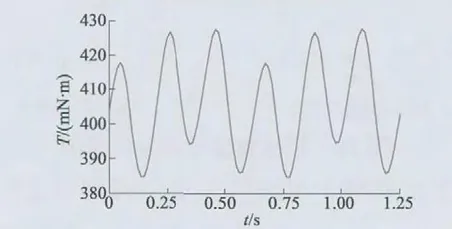
图10 加载后得到转矩波形图
仿真结果数据初定如下:
电压:24 V DC;
额定转矩:0.2 N·m;
额定转速:5 r/min;
电机功耗:3.6 W;
电机重量:0.28 kg。
2.2 旋转变压器解码补偿技术
由于项目对电机驱动系统的体积与重量的要求,采用单通道旋转变压器精度不能达到技术指标要求,因而需对解码信号进行补偿,再采用相应手段对解码信号进行补偿处理,使系统定位精度最终满足的整体要求。
通过将单通道旋转变压器与高精度角度检测装置同轴连接。调节单通道旋转变压器零位与检测装置零位相对应,此时可以采取手动调节的方式设置角度检测装置的位置至任意一个角度,同时采样驱动电路解码部分输出的旋转变压器的位置检测值,这两个数值之间的差值即为本次测量角度的解码误差值。
通过上述方法对系统检测进行多次对比分析,其误差的重复性很好,在此基础之上以此解码误差值作为补偿值,根据补偿值的正负性将旋转变压器的检测值加上或减去补偿值,所得结果作为最终的测试数值,这个方法可以有效提高检测精度。
3 测试结果
对机械臂关节中永磁同步伺服系统进行了相应测试。电机额定电压为24 V(DC),转矩0.2 N·m条件下,电机输入功率为3.7 W,电机质量为0.29 kg。
在将伺服驱动系统安装于机械臂上之后,采用Leica 公司绝对式激光跟踪仪AT901-LR 对机械臂位置检测精度进行了测试,给定指令的周期为10°,在0°至90°之间进行往复测试,共计测量19 个点。如图11 所示,以关节旋转中心为原点,以机械臂所在平面为坐标平面,得出的运动轨迹实际定位误差检测图。
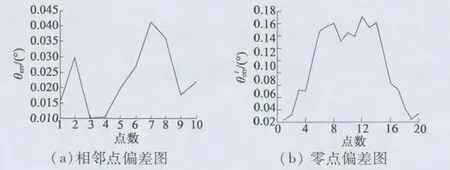
图11 机械臂定位误差检测图
测量结果整个机械臂关节位置伺服定位误差最大值为10.26',而且系统重复定位误差最大值仅为2.48',基本满足了研究目标。
4 结 语
本文在结构设计中将分装式电机与位置传感器进行一体化结构设计,可以有效降低永磁同步伺服系统的整体重量;在电机电磁设计中使用合理的极槽配合配合计算机仿真进行优化,确保电机在有限重量下减小功耗以满足空间能耗的要求;采用特殊的单通道旋转变压器解码补偿技术提高系统的位置伺服精度。
[1] 陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,1996.
[2] 许实章.电机学[M].北京:机械工业出版社,1992.
[3] 唐任远.现代永磁电动机[M].北京:科学出版社,1997.
[4] 王成元,周美文,郭庆鼎.矢量控制交流伺服驱动电动机[M].北京:机械工业出版社,1995.
[5] 谭春林,刘新建.大型挠性空间机械臂动力学与减速比对振动抑制影响[J].国防科技大学学报,2009,31(4):102-106.
[6] 孙伟,高欣,王真,等.应用于机器人关节的旋转变压器检测误差查表补偿[J].微特电机,2014,42(1):66-68.
[7] ATTAIANESE C,TOMASSP G,DEBONIS D. A low cost resolver-to-digital converter[C]//IEEE International Electric Mathines and Drives Conference,2001:917-921.
[8] HANSELMAN C. Resolver signal requirements for high accuracy resolver-to-digital conversion[J]. IEEE Trans. on Ind. Electron.,1990,37(6):556-561.
[9] BOYES G E. Synchro and Resolver Conversion[M]. Analog Devices Inc.,1980.
[10] ILC Data Device Corporation.Synchro Conversion Handbook[M].ILC Data Device Corporation,1982.
猜你喜欢
中国石油石化(2022年12期)2022-07-16 08:28:28
北京航空航天大学学报(2022年6期)2022-07-02 01:59:46
上海大中型电机(2021年2期)2021-07-21 03:01:32
防爆电机(2020年6期)2020-12-14 07:16:54
中国外汇(2019年19期)2019-11-26 00:57:32
家庭影院技术(2018年11期)2019-01-21 02:20:50
家庭影院技术(2018年11期)2019-01-21 02:20:48
测控技术(2018年12期)2018-11-25 09:37:44
北京航空航天大学学报(2016年4期)2016-02-27 06:32:11
弹箭与制导学报(2015年1期)2015-03-11 15:32:18
