基于比色传感器阵列的农残检测系统设计*
2015-01-12 09:05:02宋振国侯长军罗小刚霍丹群
传感器与微系统 2015年9期
宋振国, 侯长军, 罗小刚, 李 显, 邓 波, 霍丹群
(1.重庆大学 生物工程学院,重庆 400044;2.泸州老窖股份有限公司 国家固态酿造工程技术研究中心,四川 泸州 646000)
基于比色传感器阵列的农残检测系统设计*
宋振国1, 侯长军1, 罗小刚1, 李 显1, 邓 波2, 霍丹群1
(1.重庆大学 生物工程学院,重庆 400044;2.泸州老窖股份有限公司 国家固态酿造工程技术研究中心,四川 泸州 646000)
针对传统农残检测方法需使用大型分析仪器、操作复杂等不足之处,根据比色传感器阵列与待测样品交叉响应产生颜色变化的基本原理,设计了一种新型的农残检测系统。系统的下位机为PIC16F877A微控制器,辅助上位机完成对检测温度和检测流程的控制;上位机完成对比色传感器阵列的图像采集和图像处理,获得检测结果。最后应用该系统对浓度为0.1mg/L的3种农药溶液进行检测,结果表明:该系统能准确检测识别这3种农药溶液。
比色传感器阵列; 农残检测; 微控制器
0 引 言
传统农残检测方法(如气相色谱法,液相色谱法等)通常需要大型分析仪器,操作复杂,不适于现场实时检测[1]。文献报道的农残检测法有生物传感器和化学传感器法等,但生物传感器的稳定性较差、易失活,化学传感器的合成往往比较复杂。已有的农残检测产品如乙酰胆碱酯酶抑制速测卡只能检测有机磷和氨基甲酸酯类农药,ELASA试剂盒检测操作比较复杂且价格较高[2]。
1 系统检测原理和总体设计
1.1 系统检测原理
比色传感器阵列是由一系列具有非特异性、交互灵敏性和稳定性的敏感点组成,如卟啉类化合物、pH指示剂和氧化还原染料等。与味觉或嗅觉识别的原理相似,比色传感器阵列上的各敏感点与待测样品会发生不同程度的交叉响应而产生不同的颜色变化[7]。利用阵列上各敏感点在反应前后的颜色变化,可实现对待测样品的特异性表征,进而实现检测识别。
由三基色原理可知,大多数颜色可通过红(R)、绿(G)、蓝(B)按照不同的比例合成产生。本系统通过图像采集获取比色传感阵列反应前后的图像,经图像处理获得阵列上各敏感点的RGB变化,各点RGB变化的组合便是待测样品的特征响应。
1.2 系统总体设计
1.2.1 系统组成
系统分为上位机和下位机两部分,上位机为计算机,主要完成图像采集和图像处理;下位机为PIC16F877A微控制器,接收上位机指令,完成对各模块的控制。系统组成如图1。
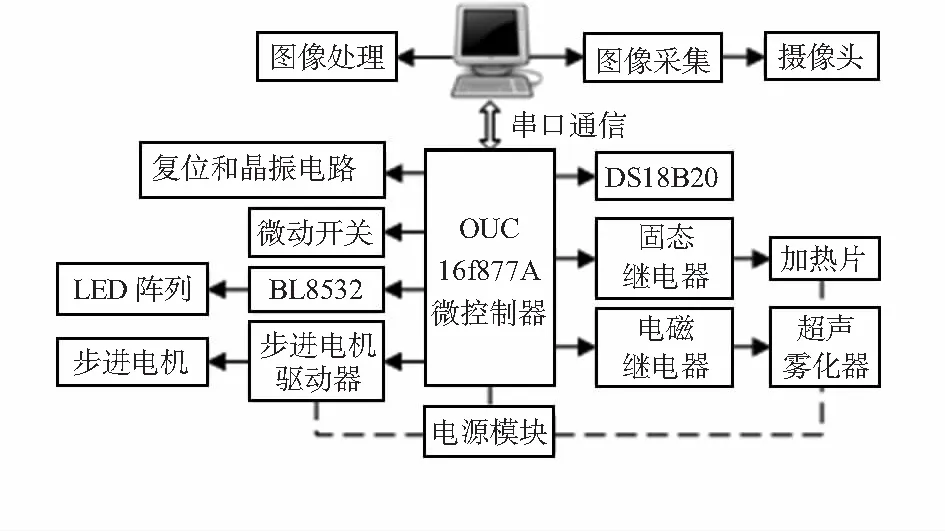
图1 系统框图
1.2.2 工作流程
如图2所示,计算机发送温控开始指令,微控制器开始执行温度检测与PID温度控制;待检测室温度达到指定温度后,打开背景光源;将阵列放到反应台,控制步进电机使其到达检测室,采集图像;之后控制步进电机使阵列到达喷涂加样室,定时开闭雾化器,完成加样;然后控制步进电机使阵列返回检测室,再次采集图像;最后对采集的图像进行处理,得到其反应前后的差谱图和相应的颜色变化数据。
无锡市“长江河道采砂管理合作机制”的参与单位分别为江阴海事局、无锡市地方海事局、无锡市水警支队、江阴市水上派出所、长航公安张家港派出所等。按照两部委关于“长江涉砂船只整治的要求”,无锡市有关部门协作联动,依法摸清了长江江阴段采砂船只情况。目前,长江江阴段共有5艘采砂船和41艘过驳吊机船登记入册,其中5艘采砂船为江阴籍采砂船主所有,已全部在指定的芦埠港闸口内集中停泊,接受统一管理。41艘过驳吊机船基本集中停泊在长江申港段水域内,全部证照齐全。
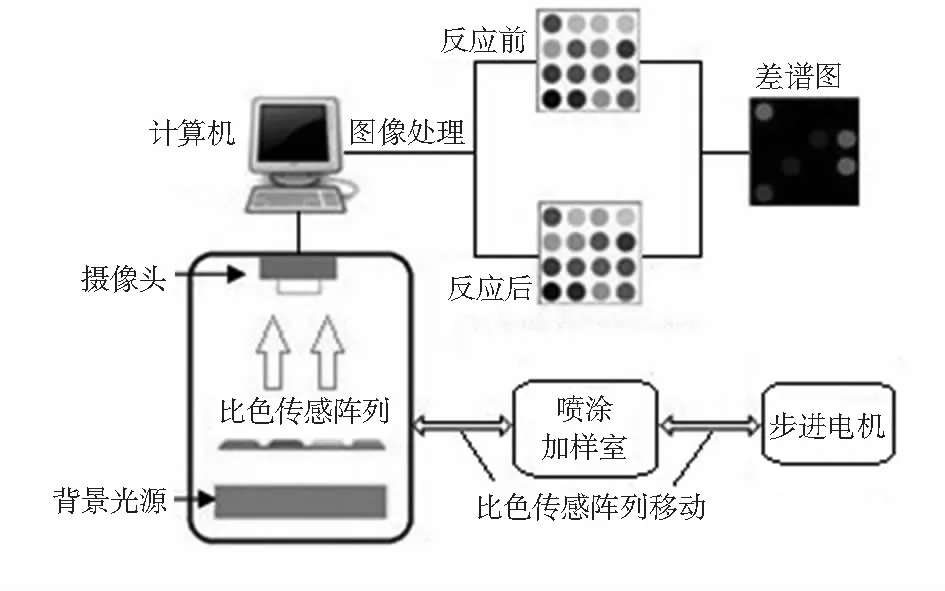
图2 检测流程示意图
2 硬件设计
2.1 步进电机控制模块
步进电机是将电脉冲信号转变为角位移的开环控制元件,其主要特点是能实现精确位移、精确定位,且无积累误差。步进电机控制模块完成对步进电机的运动控制,使其带动阵列前后运动至指定位置,实现自动化检测。该模块由微控制器、步进电机驱动电路组成:微控制器提供脉冲信号、方向信号和脱机信号,同时完成对脉冲的计数,以实现准确定位;驱动电路以THB7128两相混合式步进电机驱动芯片为核心,根据微控制器提供的信号使步进电机运动。驱动电路原理图如图3。

图3 步进电机驱动电路原理图
2.2 温度控制模块
温度控制模块完成对检测温度的控制,实现检测条件的标准化。如图4所示,该模块包括温度传感器DS18B20,固态继电器和加热片。微控制器接收到温控开始指令后,DS18B20进行温度检测,微控制器将测得的温度T与设定的温度T0进行比较,并将两者的偏差e作为输入量进行PID算法控制[8];微控制器将PID产生的控制量转换为对固态继电器的通断控制,从而实现对加热片通电时间的调节,控制其产生热量,实现对温度的控制。

图4 温度控制原理框图
2.3 超声雾化器控制模块
该模块实现对加样的自动控制,主要由继电器和光耦器件组成。微控制器通过控制继电器实现对雾化器的开关,由于雾化器的工作电压为220 V,工作时所引起的纹波易对微控制器造成干扰和破坏,故采取光耦隔离用以绝缘保护和防干扰。
2.4 背景光源驱动控制模块
背景光源是由白光LED组成的阵列,驱动芯片为BL8532。该模块能为LED阵列中的各发光二极管提供相同大小的稳定电流,为图像采集提供均匀柔和的背景光,保证图像采集的质量。
3 软件设计
3.1 上位机程序
上位机程序完成图像定时采集和实时显示,完成与下位机的通信,并为用户提供交互界面。该程序使用VS2008开发环境,图像采集和实时显示通过使用VFW编程实现,串口通信通过使用MSCOMM控件实现。
3.2 下位机程序
下位机程序在Maplab环境下编译调试。下位机程序流程图如图5所示,主要子程序包括步进电机运动控制程序、温度采集程序、PID温度控制程序、串口通信程序等。
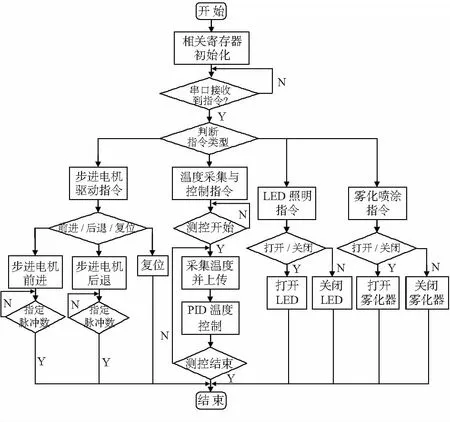
图5 下位机主程序流程图
4 系统测试与结果分析
以配置的浓度为0.1 mg/L的敌百虫、多菌灵和林丹3种农药作为检测对象,对所设计的农残检测系统进行测试。按照系统工作流程,对这3种农药各进行5组平行实验,获取并存储阵列与各农药反应前后的图像,之后对阵列图像进行处理,得到比色传感阵列对这3种农药的响应图谱(如图6所示)和相应的颜色变化数据。
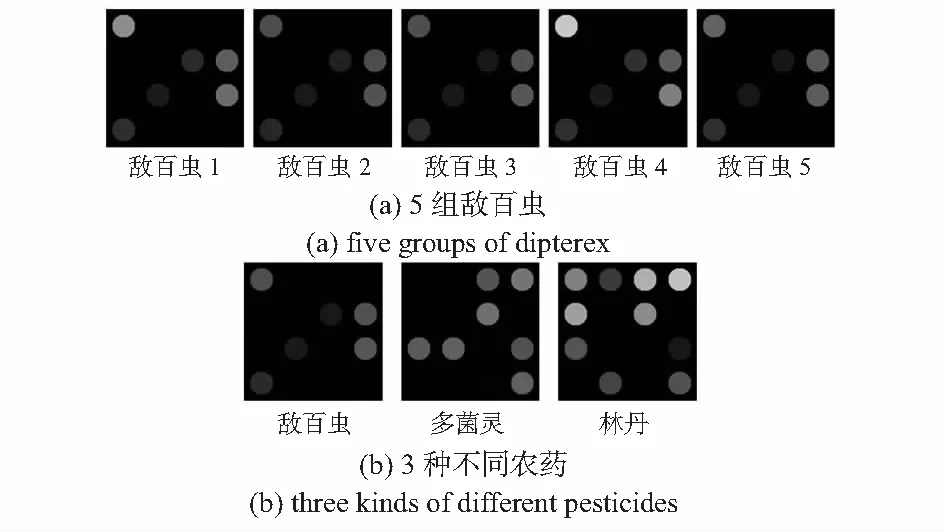
图6 差谱图
由图6(a)可知,比色传感器阵列对敌百虫的5组平行样的响应点的位置相同,说明阵列对敌百虫的响应具有较好的重复性。由图6(b)可以看出:比色传感器阵列与上述3种农药反应后,阵列响应点的位置存在差异, 3种农药的响应图谱明显不同。这表明比色传感器阵列响应点的位置与待测农药具有对应关系,利用比色传感器阵列响应点的差异可区分不同种类的农药。
为进一步说明该系统的准确性和可靠性,利用SPSS统计分析软件对比色传感阵列反应前后的颜色变化数据进行聚类分析(HCA)和主成分分析(PCA),分析结果如图7、图8所示。
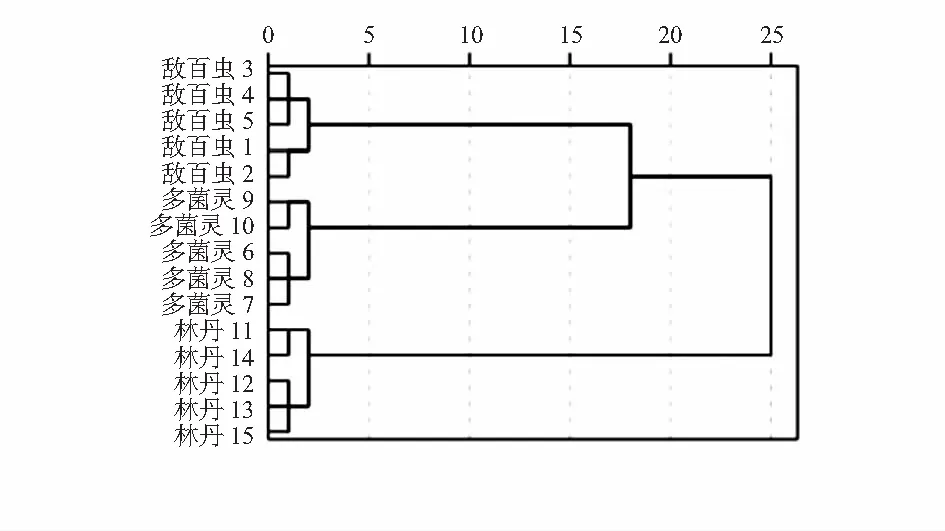
图7 3种农药样品的聚类分析图

图8 对3种农药样品的前两个主成分分析散点图
由图7所示的HCA图可知,同一农药的5组平行样被正确的聚类到一起, 3种农药各自聚为一类;由图8所示的PCA图可知,同一农药的5组平行样密集分布在一起,3种农药分布在不同的区域。两者均说明比色传感阵列对3种农药响应所产生的颜色变化数据具有良好的区分度,且重复性较好。由此可判断本系统能准确区分不同农药,并具有良好的重复性。
5 结 论
针对传统农残检测方法需要大型分析仪器、操作复杂等不足,本文基于比色传感阵列的交叉响应原理,构建了一种新型的农残检测系统,并完成了对系统的软硬件设计。使用该系统对0.1 mg/L的3种农药溶液进行检测,结果表明:该系统可实现对不同农药溶液的检测识别。后续对该系统和比色传感阵列进行优化,利用该系统逐步建立起农药的指纹图谱数据库,这将为农残检测提供一种新方法,具有一定的发展前景。
[1] 罗飞飞,廖淑珍,张瑞莲,等.双重信号放大的乙酰胆碱酯酶电化学传感器检测有机磷农药[J].分析化学,2013,41(10):1549-1554.
[2] 白玉洁.胶体金试纸条的光电检测仪器研制[D].天津:天津大学,2008:2-5.
[3] Li Junjie,Hou Changjun,Huo Danqun,et al.Development of a colorimetric sensor array for the discrimination of aldehydes[J].Sensors and Actuators B: Chemistry,2014,196:10-17.
[4] Zhang Chen,Suslick Kenneth S.A colorimetric sensor array for organics in water[J].Journal of the American Chemical Society,2005,127(33):11548-11549.
[5] Zhang Chen,Bailey Daniel P,Suslick Kenneth S.Colorimetric sensor arrays for the analysis of beers:A feasibility study[J].Journal of Agricultural and Food Chemistry,2006,54 (14):4925-4931.
[6] 罗小刚,刘静静,刘 平,等.基于卟啉化学传感器的肺癌呼出气体检测系统[J].仪器仪表学报,2010,31(8):216-222.
[7] Jon R Askim,Morteza Mahmoudi,Kenneth S Suslick.Optical sensor arrays for chemical sensing: The optoelectronic nose[J].The Royal Society of Chemistry,2013,42:8649-8682.
[8] 宋海飞,毛海涛.具有恒温控制功能的快速血糖仪的设计[J].传感器与微系统,2010,29(8):111-116.
侯长军,通讯作者,E—mail:houcj@cqu.edu.cn。
Design of pesticide detection system based on colorimetric sensor array*
SONG Zhen-guo1, HOU Chang-jun1, LUO Xiao-gang1, LI Xian1, DENG Bo2, HUO Dan-qun1
(1.College of Bioengineering,Chongqing University,Chongqing 400044,China;2.National Engineering Research Center of Solid-State Brewing,Luzhou Laojiao Group Company Limited,Luzhou 646000,China)
A new type of pesticide detection system is designed,aiming at deficiencies of traditional pesticide detecting methods which need large analytical instruments and complicated operation.The basic principle is the color change when colorimetric sensor array occurs cross response to the tested sample.The lower computer of the system is PIC16F877A microcontroller which assists the upper computer to control the temperature and the flow of the detection.The upper computer of the system completes image acquisition and image processing of the colorimetric sensor array to get the result of the detection.The system is used to experimentally detect 3 different pesticides in the concentration of 0.1mg/L.Experiment results show that the system can correctly distinguish the 3 different pesticides.
colorimetric sensor array; pesticide detection; microcontroller
2015—01—06
国家自然科学基金资助项目(31171684);国家科技支撑计划资助项目(2014BAD07B02);粮酒生物技术及应用四川省重点实验室项目(NJ2014—03);重庆大学大型仪器设备开放基金资助项目
10.13873/J.1000—9787(2015)09—0097—03
TP 212.2
B
1000—9787(2015)09—0097—03
宋振国(1989-),男,山东临沂人,硕士研究生,研究方向为生物医学电子与信息技术。
猜你喜欢
今日农业(2021年17期)2021-11-26 23:38:44
今日农业(2021年14期)2021-11-25 23:57:29
今日农业(2021年9期)2021-07-28 07:08:42
今日农业(2019年16期)2019-01-03 11:39:20
电子制作(2017年14期)2017-12-18 07:07:58
海南医学(2014年20期)2014-04-01 09:03:32
单片机与嵌入式系统应用(2014年8期)2014-03-23 23:18:21
单片机与嵌入式系统应用(2014年9期)2014-03-11 15:35:13
电子设计工程(2014年18期)2014-02-27 12:00:35
中国实用医药(2013年23期)2013-06-02 10:49:02