面向配光特性的汽车AFS动态转角数学模型研究*
2015-01-06 08:08:48李礼夫杨明俊
汽车技术 2015年1期
李礼夫 杨明俊
(华南理工大学)
面向配光特性的汽车AFS动态转角数学模型研究*
李礼夫 杨明俊
(华南理工大学)
针对常用的汽车自适应前照灯(AFS)转角数学模型存在的问题,对汽车车身侧倾角与转弯半径及车速之间关系进行研究,建立面向配光特性的汽车AFS动态转角数学模型,通过AFS的二维转动对侧倾后AFS照射方向进行修正。结果表明,与常用的AFS转角数学模型相比,AFS动态转角数学模型求得的前照灯转角在yz平面上补偿角αx(t)最大达0.7°,占yz平面上设计旋转角度的28%,解决了侧倾后常用的AFS配光特性难以达到国家标准GB4599-2007要求的问题。
1 前言
反映汽车车速、转弯半径、配光性能与前照灯转角之间关系的汽车自适应前照灯(AFS)转角模型是AFS的关键技术之一。然而,由于未考虑汽车转弯过程中的车身侧倾现象,使其存在AFS配光特性难以达到前照灯国家标准GB4599-2007[1]要求的问题,特别是侧倾后导致防眩点B50L处的照度值过高。为此,提出面向配光特性的AFS动态转角数学模型,以提高汽车夜间行驶安全性。
2 面向配光特性的AFS动态转角数学模型
2.1 前照灯近光配光性能要求
根据国家标准GB4599-2007要求,AFS在配光屏幕上的近光配光光型应具有如图1所示特性。
标准汽车前照灯配光性能要求是保证车辆在行驶时有足够的道路照明,同时不能给相对行驶的车辆驾驶员造成眩目。图1中B50L点称为防眩点,用以表示距前照灯50 m处迎面而来的车辆驾驶员眼睛的位置。Ⅲ区称为防眩区,表明前照灯的眩目情况[2]。其中,AFS光源和光学透镜主要决定了配光特性的形状和光照度,车灯左、右光源基准中心的相互位置关系影响配光特性的行驶照明空间分布。
2.2 汽车AFS动态转角模型建立
设汽车AFS坐标系为图2所示的∑oxyz,其中,静止状态下的汽车AFS左、右前照灯基准中心连线的中点为该坐标系的原点o,x轴正向设为平行于地面的驾驶员右侧,y轴正向设为车辆前进方向,z轴垂直地面向上。
图2中,Cl(-Lc/2,0,0)、Cr(Lc/2,0,0)分别为静止状态下左、右前照灯的基准中心,两者之间距离为Lc,而L2为包含左、右前照灯基准中心的xoz平面至配光屏幕的距离。Clp(-Lc/2,L2,0)、Crp(Lc/2,L2,0)分别为静止状态下左、右前照灯基准中心光束在配光屏幕上的对应光斑点。在∑oxyz坐标系下,汽车AFS的转弯行驶转角θz(t)数学模型为[3]:
由式(1)可知,θz(t)仅与uc(t)和R(t)有关。然而,由汽车原理[4,5]可知,在曲线行驶时位于汽车悬架上的车身将发生侧倾,其侧倾角Φr(t)与R(t)及uc(t)之间关系可表示为:为前照灯转角;为车速;
依据有关规定,河南省小农水项目的独立费用按不超过中央和省财政投资1%的比例计取,不足部分在项目总投资之外自筹解决。独立费用主要包括建设管理费、生产准备费、勘测设计费、建设和施工场地征用费及其他,如果按照市场价格收费,提取的独立费尚不足以支付勘测设计费和监理费,而多数县又很难在总投资外再筹措资金。因此,实施中每一项支出都受限制,甚至某些该发生的费用(如勘测费)也是能省则省,不仅给建设管理单位正常的管理工作造成了很大困难,而且给工程建设质量也带来了不利影响。
其中:
式中,a为质心至前轴的距离;b为质心至后轴的距离;hb为质心至侧倾中心线的距离;haf为前轴侧倾中心高度;hao为质心对应侧倾中心高度;har为后轴侧倾中心高度;m为汽车总质量;mf为前轮非簧载质量;mr为后轮非簧载质量;mb为车身质量;Caf为前轮侧偏刚度;Car为后轮侧偏刚度;Kϕ为悬架的侧倾刚度系数;g为重力加速度;前轮胎侧向偏移量df≈haf-hao;后轮胎侧向偏移量dr≈har-hao。
由于汽车AFS左、右前照灯位于汽车车身上,其在配光屏幕上的配光特性将发生变化,可能导致防眩点B50L的照度值不满足法规要求,给对方来车造成眩目[6]。以图3所示的汽车左转弯时AFS左、右前照灯配光光型变化原理为例进行分析。
当汽车车身产生侧倾时,由图3可知,左前照灯基准中心Cl将绕O点旋转Φr(t)角变化到点,为侧倾后左前照灯基准中心,其光束在配光屏幕上的对应光斑点为因此,将引起前照灯基准中心光束在配光屏幕上对应光斑点产生偏差量,其中,在X向与Z向的偏差值分别为和,其值可以分别表示为:
因此,通过使处于C′l(t)位置的左前照灯转向器绕x轴旋转αx(t)角度和绕z轴旋转βz(t)角度的方法,可使光斑点与光斑点重合,消除偏差量。其中,与在∑oxyz坐标系中的几何关系可表示为:
结合常用的AFS转角数学模型,可推导出面向配光特性的汽车AFS左前照灯转向器动态转角θl,zx模型,即:
同理,对于右前照灯转向器而言,面向配光特性的汽车AFS右前照灯转向器动态转角模型为:
3 面向配光特性的AFS转角数学模型试验
3.1 基于Matlab的仿真试验
为了验证面向配光特性的AFS动态转角模型可行性,以福特某款车的前照灯作为研究对象,运用矩阵分析软件Matlab对面向配光特性的AFS动态转角模型进行求解分析,该车型参数如表1所示。
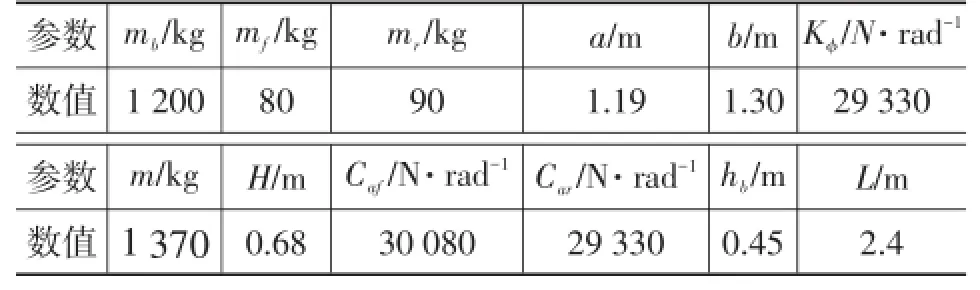
表1 福特某款车车型参数
根据法规[7]可知,汽车在转弯行驶时,车速与最小转弯半径对应关系如表2所示。

表2 转弯行驶时车速与最小转弯半径对应关系
由汽车车身侧倾角Φr(t)与转弯半径R(t)及车速uc(t)之间关系,取转弯半径区间为(Rmin,500m),可得它们之间的关系曲线如图4所示。
由图4可知,相同转弯半径下,车速越高车身侧倾角越大,由于最小转弯半径的限制,最大侧倾角出现在转速为20 km/h工况下。另外,车身侧倾角Φr(t)影响汽车前照灯的配光特性。
侧倾后的AFS照射位置经过动态转角模型修正后,实际照射位置即修正后前照灯实际基准中心光束的光斑点与期望的照射位置即理想基准中心光束的光斑点Clp(t)偏差随转弯半径变化曲线如图5所示。
由图5可知,实际基准中心光束的光斑点Cl′p(t)与理想基准中心光束的光斑点Clp(t)偏差随转弯半径增大而减小,最大偏差约为0.25 mm,可以忽略,则认为该面向配光特性的AFS动态转角模型修正方法可行。
补偿角αx(t)、βz(t)与转弯半径R(t)及车速uc(t)的关系曲线如图6所示。
由图6可知,考虑侧倾影响时,若车速一定,则汽车前照灯补偿角αx(t)与βz(t)随着转弯半径的减小而增加;若转弯半径一定,αx(t)与βz(t)随车速的增加而增加;由于文献[3]中3个条件的限制,最大补偿角αx(t)与βz(t)在车速uc(t)为20 km/h时出现。其中补偿角最大值αzmax(t)约为0.7°,而前照灯转角在yoz平面上设计旋转角度为2.5°,故该增量调整比例占28%,不可忽略;另外转弯半径大于350m时,汽车侧倾运动特性对αx(t)影响很小,可不作考虑;而βzmax(t)值为0.11°,在xoy平面上占设计旋转角度的2%,可忽略其影响。
3.2 基于Tracepro的仿真
为了验证面向配光特性的转角数学模型对侧倾后配光光型的调整效果,进行基于Tracepro的仿真分析。图7、图8分别表示汽车发生侧倾后的配光特性和按面向配光特性的转角数学模型进行转角调整之后得到的配光特性与标准配光特性对比,可知修正后的配光特性中B50L点处照度值为0.289 lux,小于法规规定的0.3 lux,满足法规要求。
4 结束语
基于系统动力学的汽车车身侧倾3自由度操纵模型,对汽车车身侧倾角Φr(t)与转弯半径R(t)及车速uc(t)之间关系进行了研究,分析了侧倾角Φr(t)与AFS车灯配光性能相互作用机理,提出面向配光特性的汽车AFS动态转角数学模型,解决了常用的AFS转角数学模型存在的配光性能难以达到国家标准要求的难题,提高了汽车夜间行驶安全性。面向配光特性的AFS动态转角模型需要考虑侧倾的速度区间为(0~60 km/h);当车速越大、转弯半径越小时,侧倾对前照灯的影响越明显;前照灯补偿角αx(t)最大约达0.7°,而前照灯转角在yoz平面上设计旋转角度为2.5°,故该补偿角调整比例占28%,不可忽略。
1 GB/T 4599-2007,汽车用灯丝灯泡前照灯.北京:国家计量出版社,1992:1~15.
2 魏飞雄,曹琛.汽车用前照灯产品的国家标准解析.汽车零部件,2013(10):80~90.
3 李礼夫,邓前.汽车自适应前照灯转弯模式的数学模型研究.汽车技术,2010(10):43~46.
4 余志生.汽车理论.北京:机械工业出版社,2008:130~200.
5 喻凡,林逸.汽车系统动力学.北京:机械工业出版社,2005:220~240.
6 王华.自适应前照明系统(AFS)眩目性评估.汽车零部件,2011(7):73~80.
7 JTGB01-2003.公路工程技术标准.北京:人民交通出版社,2004.
8 房旭,姚勇,刘军,等.智能汽车前照灯照明系统(AFS)研究.天津汽车,2006(4):17~24.
(责任编辑帘 青)
修改稿收到日期为2014年11月1日。
Research on Mathematical Model of Dynamic Bending Mode of Vehicle Adaptive Front Lighting System For Light Distribution Property
Li Lifu,Yang Mingjun
(South China University of Technology)
To solve the deficiencies existing in the commonly used AFS mathematical model,we analyze the relationship between the body roll angle,turning radius and vehicle speed,and build the mathematical model of dynamic bending mode of vehicle adaptive front-lighting system for light distribution property,and revise the lighting direction of AFS after side roll by AFS 2D turning.The results show that,compared with commonly used mathematical model of AFS, the turning angle of headlamp obtained with mathematical model of AFS dynamic bending mode has a offset angleof up to 0.7°on planeyz,which accounts for 28%of the designed rotation angle on plane,which enables the AFS light distribution property commonly used in side roll to comply with requirement of GB4599-2007.
Vehicle,AFS,Mathematical model,Light distribution property
汽车 AFS 转角数学模型 配光特性
U463.68
A
1000-3703(2015)01-0044-04
广东省战略性新兴产业发展专项资金LED产业项目:陶瓷基LED模组化结构光源和一体化照明系统集成及产业化(2012A080304015)。
猜你喜欢
大自然探索(2024年1期)2024-02-29 09:10:30
新作文·小学低年级版(2022年3期)2022-08-30 07:36:46
中学生数理化·七年级数学人教版(2021年9期)2021-11-20 06:11:52
智慧少年·故事叮当(2021年5期)2021-08-23 02:25:31
今日农业(2019年15期)2019-01-03 12:11:33
汽车维护与修理(2018年7期)2018-10-13 06:03:48
解放军健康(2017年5期)2017-08-01 06:27:42
汽车维护与修理(2016年4期)2016-11-26 06:29:50
知识经济·中国直销(2016年2期)2016-11-07 09:33:42
交通建设与管理(2015年13期)2015-03-20 15:18:48