一种三级式同步电机转矩脉动抑制方法
2015-01-04 01:33马鹏刘卫国毛帅骆光照西北工业大学自动化学院陕西西安710072
电机与控制学报 2015年11期
马鹏,刘卫国,毛帅,骆光照(西北工业大学自动化学院,陕西西安 710072)
一种三级式同步电机转矩脉动抑制方法
马鹏,刘卫国,毛帅,骆光照
(西北工业大学自动化学院,陕西西安 710072)
∶针对三级式同步电机在电动起动过程中,主发电机的转子励磁脉动导致输出转矩脉动较大、带载起动性能较低的问题,分析了转子励磁脉动对主发电机运行特性的影响,以及在采用矢量控制策略时,由于受到谐波电流的影响而输出的误差电压矢量的分布特点。为了提高主发电机的带载起动性能,本文提出了一种采用极坐标确定控制器调制电压矢量的起动控制方法,与传统的矢量控制策略相比,该方法在一个调节周期内不会产生电压幅值调节误差,仅会产生较小的矢量角调节误差。实验结果表明,在100r/min转速时,传统矢量控制方法仅能拖动5N.m的负载,新方法则能够稳定拖动40N.m负载,说明新方法更适合电机在拖动航空发动机起动过程中低转速、大负载的运行工况。
∶三级式同步电机;航空发动机;励磁脉动;起动控制;转矩脉动抑制
0 引言
随着多电/全电飞机的迅速发展,起动/发电一体化已是未来航空电源系统的一个重要发展方向。目前,在航空大功率交流电源系统中,旋转整流器式三级式同步电机已经作为发电机得到了广泛应用,为了简化飞机电源系统的结构,减小体积、重量,提高可靠性和可维护性,对采用该电机实现的起动/发电一体化系统的需求也越来越迫切[1-5]。由于该电机为无刷结构,要在不改变电机结构的基础上实现主发电机的电动起动功能,可以采用向励磁机施加单相交流或方波电压的方式,解决主发电机在静止/低速状态下的励磁问题,为主发电机的电动起动提供前提条件,该方法在文献[6-13]中已通过仿真和实验等多种方式得到充分的论证。但是受旋转整流器二极管的开关与单向导电性影响,主发电机的转子绕组中会含有大量的谐波成分[10,14],受此影响,当主发电机处于电动状态时,其电枢绕组中也会出现相应的谐波分量,这对起动控制器的检测精度及控制精度都会产生较大影响,使得主发电机输出转矩脉动较大,带载起动性能变差,重载时易产生振荡停机等问题。
目前,国内已有多名专家学者展开了三级式同步电机的起动控制研究。文献[8]采用基本型直接转矩控制策略,文献[9-10]采用一种空间矢量调制型直接转矩控制策略(SVM-DTC),对主发电机的起动控制取得了大量的仿真分析成果,但是电机的带载起动控制未见实验验证;文献[11]将一种三相六拍控制方法应用到三级式同步电机的起动控制研究,但是所搭建的实验平台没有采用航空三级式同步电机,同时文章也未指出该方法的带载起动控制效果及转矩脉动分析。文献[12]采用id=0的矢量控制方式,取得了较好的起动控制效果,但是从实验结果来看,其起动力矩较小(5N.m左右),同时转矩脉动程度较大(转矩脉动峰峰值约为1.5N.m);文献[13]在采用id=0的矢量控制方式时,最大起动转矩达到5N.m左右,在改进了主发电机起动控制策略后,可以实现35N.m的起动堵转矩和400r/min、46.7N.m的稳速带载能力,但是该文献所提出的起动控制策略只适合起动控制器容量远大于主发电机容量的情况,此时可充分利用主发电机的过载能力,而无需考虑控制器的电流输出能力,因此当主发电机容量进一步增大,转矩输出要求进一步提高时,该方法仍具有一定的局限性,同时该文献也未对主发电机的转矩输出脉动及抑制效果做进一步分析。在国外已公开发表的文献中,目前主要集中于如何改造励磁系统以实现主发电机的起动控制方面[15-18],对与主发电机的输出转矩脉动抑制则少有涉及。
本文在前人研究成果的基础上,分析了旋转整流器导致的励磁脉动对主发电机输出转矩的影响,并结合实验数据,对矢量控制方式下由于励磁脉动对转矩脉动的影响进行了量化分析,对文献[13]提出的主发电机起动控制策略做了进一步的工程化改进,并分别通过仿真与实验的方式,对改进后的控制策略和矢量控制策略的带载运行效果进行了对比。
1 励磁脉动对主发电机输出转矩影响分析
图1为三级式同步电机的结构图。设向励磁机通人的励磁电流有效值为If、励磁频率为f、励磁电流初始相位角为δ,电机转速为n、励磁机转子极对数为p,ω满足ω=2πpn/60,开始转动时励磁机转子A相绕组轴线超前励磁绕组轴线的电角度为θ,励磁机的励磁绕组与电枢绕组之间的互感为Mf,忽略磁场高次谐波,此时励磁机电枢绕组产生的切割电势可表示为∶
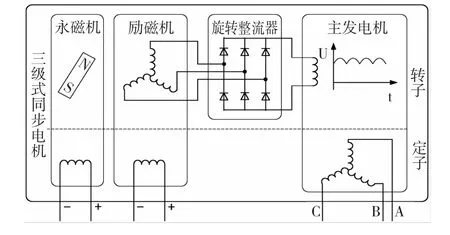
图1 三级式同步电机结构图Fig.1 Structureofthree-stagebrushless synchronousmachine
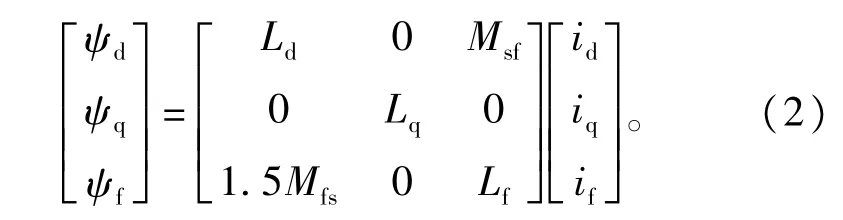
在忽略主发电机磁场的磁饱和、铁损耗及温度对参数变化的影响,假设Ld、Lq、Lf分别为电枢绕组直轴、交轴等效电感和励磁绕组电感,id、iq、if分别为电枢绕组直轴、交轴电流和励磁绕组电流,Msf= Mfs为直轴电枢绕组与励磁绕组之间的互感,np为主发极对数。得到忽略阻尼绕组时主发电机在d-q坐标系的数学模型如下[13]∶
磁链方程∶
磁转矩方程∶

按照式(1)~式(3)建立Matlab数学模型,向主发电机输人固定的id、iq值,使其在100r/min时维持输出转矩在30N.m左右,此时主发电机输出转矩脉动可以认为与控制策略无关,而仅与主发电机的励磁脉动有关,在这种仿真条件下,主发电机输出转矩如图2(a)所示,电枢谐波电流含量如图2(b)所示。
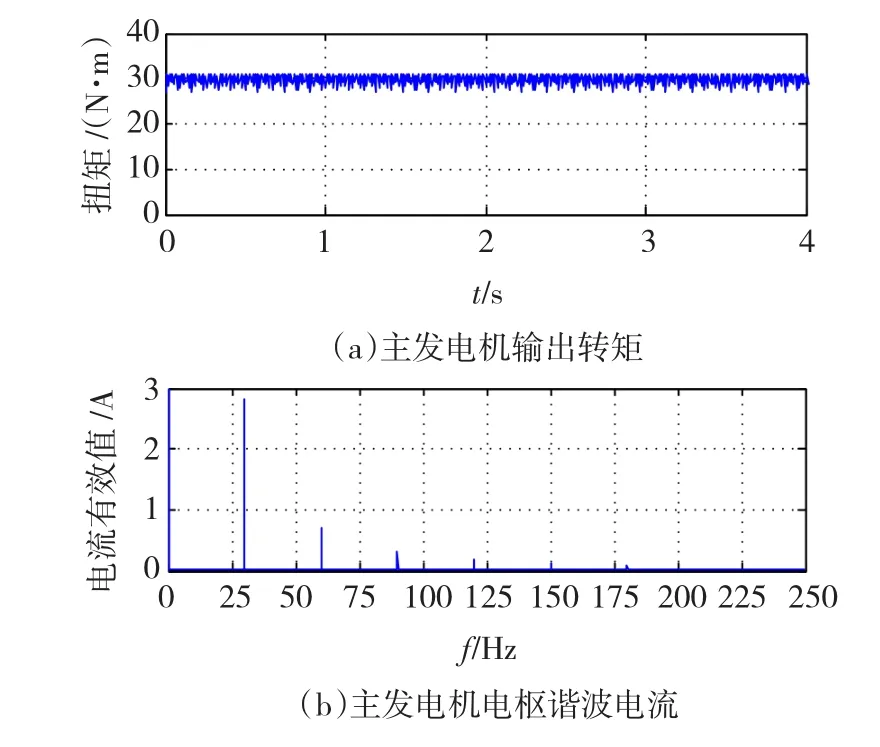
图2 转子励磁脉动对主发电机输出转矩影响Fig.2 Impactoftheexcitationcurrentpulsationon theoutputtorqueofmaingenerator
由图2可见,在不考虑控制策略影响的前提下,主发电机的转子励磁电流脉动不仅会影响主发电机输出转矩的平稳性,还会在主发电机电枢中产生较为丰富的感应谐波电流。当主发电机处于稳定运行状态时,电枢中的谐波电流会通过控制策略影响控制器输出的电压矢量,造成电机转矩脉动,接下来本文以这种思路,结合实验过程中获取的相关数据,首先分析矢量控制方式对主发电机输出转矩的影响。
2 矢量控制对主发电机输出转矩影响分析
采用矢量控制(图3)方法实现主发电机的电动起动功能时,主发电机电枢三相绕组中的谐波电流成分经Clark、Park变换后会分解为d轴谐波电流和q轴谐波电流,该谐波电流将通过电流环PID调节器影响d、q轴调制电压Vd、Vq,假设由此产生的最大电压调节误差分别为ΔVdEmax和ΔVqEmax,当理想输出电压矢量为V时,实际输出的电压矢量Vout将分布在图4所示由双点划线围成的方形区域内。由图可见,在电流环调节过程中,误差电压矢量ΔVE除了会使理想电压矢量V产生幅值误差外,还会产生角度误差。
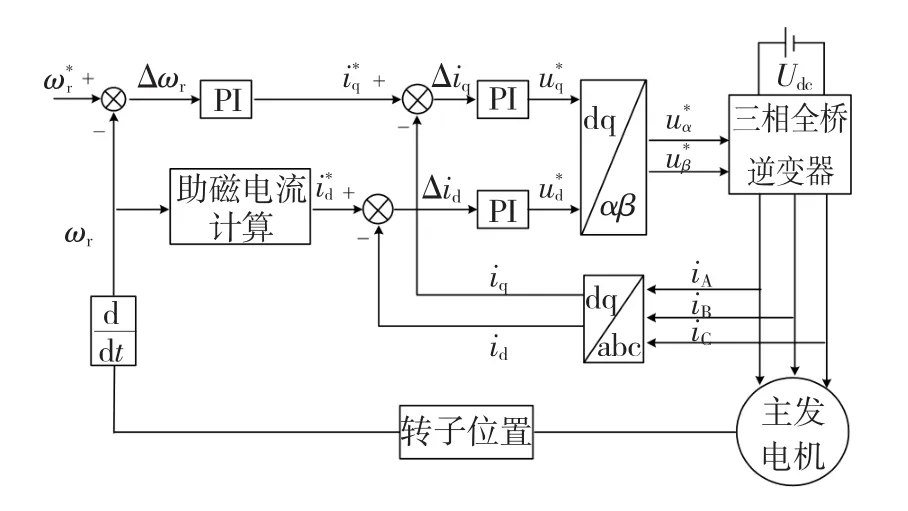
图3 主发电机矢量控制策略原理框图Fig.3 Blockofvectorcontrolstrategyfor themaingenerator
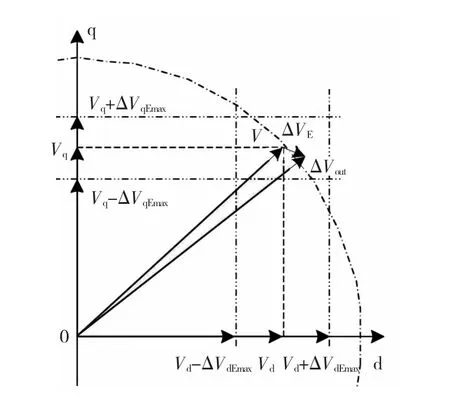
图4 矢量控制策略输出电压矢量Fig.4 Theoutputvoltagevectorofthe vectorcontrolstrategy
在实验过程中,电流环采用增量式PID调节器,其计算公式为∶

式中,ek、ek-1、ek-2分别为本次、上次及前一次采样与目标值之间的误差;Δuk为本次PID调节器输出的调节量。通过多次试验,取控制效果较为稳定的一组PID参数为∶kp=0.0002、ki=0.00015、kd=0。当主发电机的电枢电流有效值为50A左右且id=iq时,即电流矢量超前转子d轴45°电角度,通过实验观测,最大电流检测误差约为10%,以最大误差情况考虑,即ek与ek-1分别达到了误差上限5A和误差下限-5A,结合式(4),则d、q轴电压的最大输出误差电压 ΔVdEmax、ΔVqEmax以及误差电压矢量ΔVEmax分别为∶
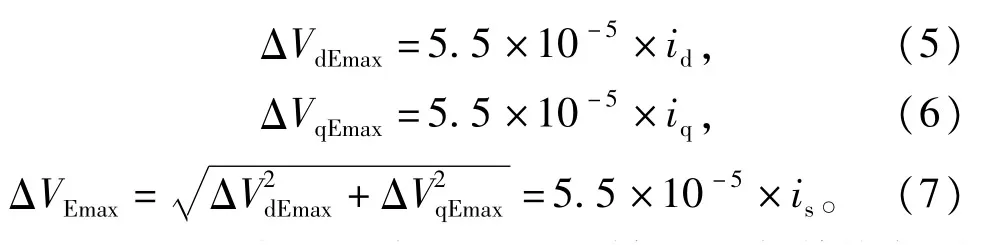
式中is为主发电机电流矢量。最大输出误差电压在控制器输出电压矢量中所占比例分别为∶

由式(5)和式(6)可知,在矢量控制方式下,输出误差电压的值与主发电机的电枢电流大小成正比。但是在航空发动机的起动过程中,一般要求驱动电机在低转速时要能够输出较大的转矩,此时起动控制器输出电流较大,而调制电压则较小,结合式(8)和式(9)可知,采用矢量控制方法时,控制器输出的误差电压在低速重载时所占比例最大,也就是说此时电机的转矩脉动程度也最大,这正是决定航空发动机起动成功的关键阶段。
采用传统的矢量控制方法实现主发电机的起动功能时,当电机在轻载状态(<5N.m)时,可维持较为稳定的运行状态,当负载继续增大时,电机开始进人振荡发散状态,直至故障停机。结合上述分析结果,可见采用矢量控制实现主发电机的低速大负载起动存在较大困难。
3 主发电机起动控制策略优化
在控制器进行SVPWM调制时,每一个PWM脉冲都对应矢量平面内一个电压矢量V。在矢量控制中是在以主发电机转子几何轴线确定的d、q轴直角坐标系内,通过电流环分别调节d、q轴电压Vd、Vq实现。而确定一个矢量除了采用这种直角坐标的方式外,还可以采用极坐标的方式,即以转子几何轴线作为极轴,通过计算输出电压矢量的大小(极径)和超前极轴的夹角(极角)唯一确定,按照这种思路,结合文献[13]的研究成果,主发电机的起动控制策略可修改为图5所示结构。
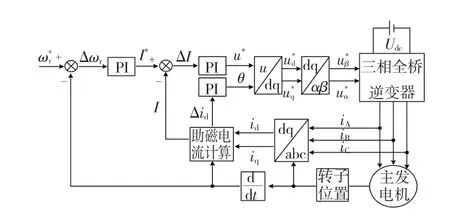
图5 改进型起动控制策略原理框图Fig.5 Blockoftheimprovedstartingcontrolstrategy
在上图所示原理图中,共有三个PI调节器。相比文献[13]中的控制策略,新增加的电流环PI调节器能够实现对主发电机电流的调节,在控制器容量与电机相近的情况下,可以有效消除过流故障。考虑本文研究的方法所针对的航空发动机加速至稳定点火转速的时间较长(不少于60s),同时不存在负载突变的情况,因此实验过程中转速PI和主发电流PI的调节周期较长。为保证电机运行过程中电压矢量超前转子d轴的夹角θ能够较快调节到给定的目标值,同时又能够保证一定的稳定性,θ的PI调节器调节周期最短,且与矢量控制时电流环的调节时间相同,因此本文主要分析在θ角PI调节器进行一次调节时,起动控制器输出误差电压矢量的分布情况。
假设理想输出电压矢量为V,由于电流检测误差导致的角度调节误差为ΔθE,则实际输出电压矢量为Vout。由于在电流PI调节周期内电压矢量V的幅值保持不变,假设θ角PI调节器的最大角度调节误差为ΔθEmax,则实际输出电压矢量Vout分布在图6中两条虚线所包含的矢量圆的圆弧上,此时控制器输出的电压矢量无幅值变化,只有较小的输出角度误差。
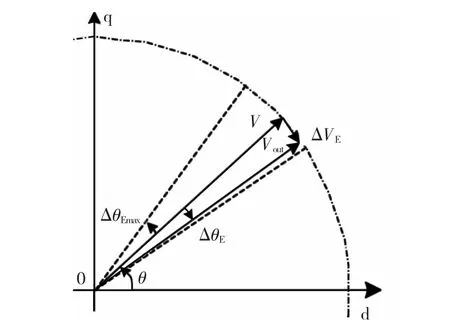
图6 改进型控制策略输出电压矢量Fig.6 Theoutputvoltagevectoroftheimproved controlstrategy
仍然采用增量式PID调节器,且调节参数同样取为∶kp=0.0002、ki=0.00015、kd=0,假设此时检测到的电流误差与矢量控制时相同,等效为极坐标后的θ波动范围约为±0.096rad电角度,由增量式PID的计算公式可得最大角度调节误差ΔθEmax为∶
ΔθEmax=5.28×10-5rad。 (10)
最大误差电压矢量为∶
ΔVEmax=ΔθEmax×V=5.28×10-5×V。(11)由式(7)可见,采用矢量控制策略时,控制器输出的误差矢量大小与主发电机电枢电流的大小有关;由式(11)可见,改进后的控制策略输出的误差矢量大小与控制器调制电压的大小有关。在主发电机拖动航空发动机起动的过程中,面临的最大的困难就是在低速阶段要能够输出足够的转矩,此时控制器输出电流较大(超过300A),而调制电压则较小(20V左右),因此改进后的控制方法将具有更好的稳定性。利用Matlab对采用两种控制方法的主发电机进行仿真分析,当施加10N.m负载时的输出转矩曲线如图7所示。
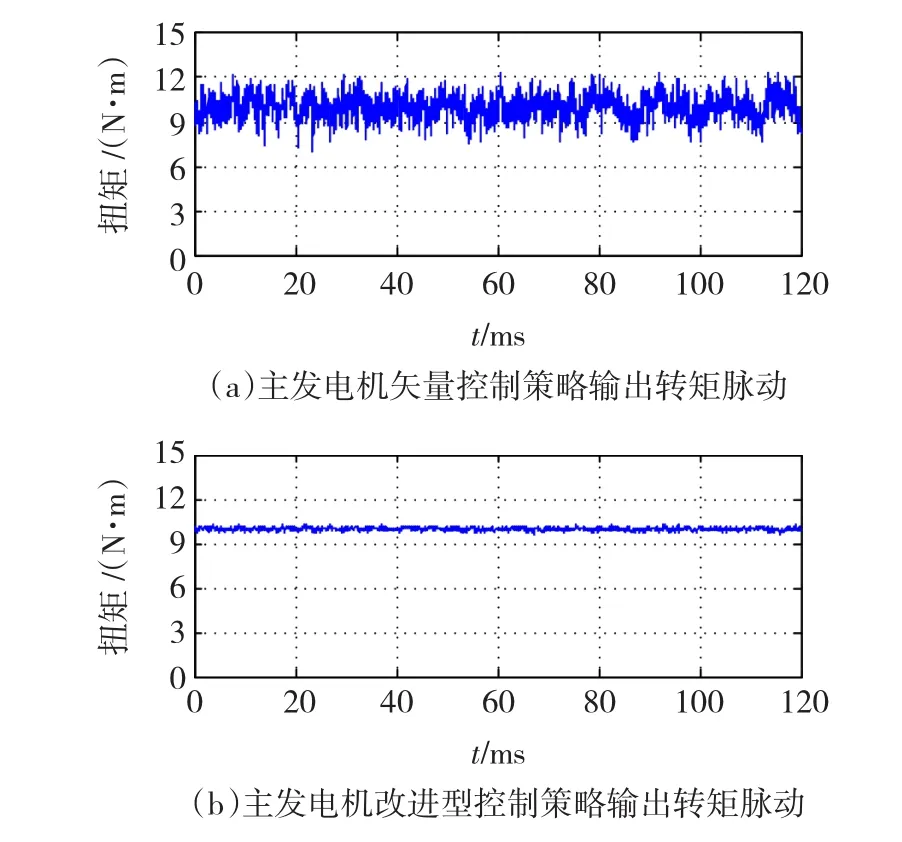
图7 主发电机输出转矩脉动仿真波形Fig.7 Simulationresultsofthetorquerippleof themaingenerator
4 实验验证
根据三级式同步电机的起动特性,本文设计了基于TMS320F2812的三级式同步电机起动控制器,采用MAGTROL公司的2PT115-T加载台模拟航空发动机负载,结合一台三级式同步电机搭建了起动实验平台。实验现场如图8所示。

图8 三级式同步电机起动实验现场图Fig.8 Scenephotosofthree-stagebrushless synchronousmachinestartingsystem
在实验过程中发现,采用矢量控制策略时,主发电机最大带载能力为5N.m左右,当继续增加负载时,系统进人不稳定状态,最终导致控制器故障停机。图9所示为采用矢量控制方式时,主发电机在5N.m负载、100r/min时的A相电流波形。
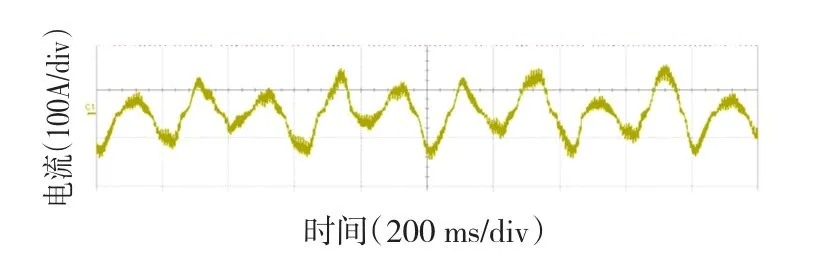
图9 矢量控制策略电流波形Fig.9 Currentwaveformsofthevectorcontrolstrategy
采用改进型的起动控制策略时,主发电机运行稳定性提升明显,带载能力也有较大提高,图10为主发电机在40N.m负载,100r/min时的A相电流波形。
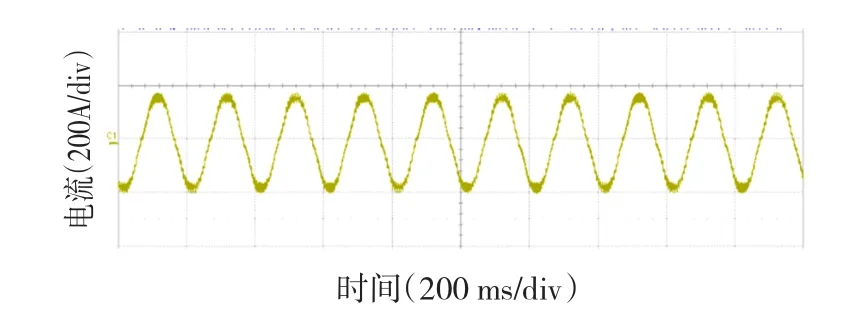
图10 改进型控制策略电流波形Fig.10 Currentwaveformsoftheimproved controlstrategy
5 结论
针对三级式同步电机在实现某型航空发动机起动过程中的运行特点以及输出转矩要求,本文分析了三级式同步电机在电动起动的过程中,主发电机转子励磁脉动对输出转矩以及电枢电流的影响情况,在此基础上进一步分析了电枢谐波电流对矢量控制策略输出电压矢量的影响情况,根据矢量控制策略输出电压矢量的确定原则,对三级式同步电机的起动控制策略进行了优化改进。在新的控制方法中,由于励磁脉动以及外部干扰导致的检测误差在一个最小控制周期的调节过程中,产生的误差电压矢量只会影响输出电压矢量的矢量角,而不会影响输出电压矢量的幅值,同时,该误差电压矢量的大小与主发电机理想调制电压矢量的大小有关,而与电流大小无关,相比传统的矢量控制策略更适合航空发动机在低转速时需要大转矩拖动的工况要求。经实验验证,采用新的控制方法时,主发电机的转矩脉动得到了较好的抑制,转矩输出平稳性及带载起动性能均得到了较为有效的提升。
∶
[1]沈颂华.航空航天器供电系统[M].北京∶北京航空航天大学出版社,2005∶1-13.
[2]陈伟.基于多电飞机的先进供电技术研究[J].飞机设计,2006(4)∶64-73. CHENWei.Researchonadvancedtechnologiesforelectricpower systemsformoreelectricaircraft[J].AircraftDesign,2006(4)∶64-73.
[3]ELBULUKME,KANKAMMD.Potentialstartergeneratortechnologiesforfutureaerospaceapplications[J].IEEEAerospaceand ElectricalSystemMagazine,1996,11(10)∶17-24.
[4]EMADIA,EHSANIM.Aircraftpowersystems∶Technology,stateof theart,andfuturetrends[J].IEEEAerospaceandElectronicSystemsMagazine,2000,15(1)∶28-32.
[5]WEIMERJA.Theroleofelectricmachinesanddrivesinthemore electricaircraft[C]//IEEEInternationalElectricMachinesand DrivesConference,Madison,USA.2003∶11-15.
[6]LIYanan,ZHOUBo,WEIJiadan.Modelingofstartergenerator basedonthree-stagebrushlesssynchronousmachines[C]//InternationalConferenceonElectricalandControlEngineering,Zibo,China.2010∶5345-5348.
[7]陈宝林,刘建红,顾毅康,等.同步电机双功能系统单相交流励磁的研究[J].南京航空航天大学学报,2003,12(1)∶621 -624. CHENBaolin,LIUJianhong,GUYikang,etal.Researchonsingle-phaseACexcitationofbifunctionalsynchronousACmotors [J].JournalofNanjingUniversityofAeronautics&Astronautic,2003,12(1)∶621-624.
[8]李岩,张超,王冬梅.航空无刷同步电机起动发电系统电动运行励磁特性[J].海军航空工程学院学报,2012,27(2)∶187 -190. LIYan,ZHANGChao,WANGDongmei.Excitationcharacteristic forstarter/generatorsystemworkingonstartingprocessofbrushless synchronousmachine[J].JournalofNavalAeronauticalEngineering Institute,2012,27(2)∶187-190.
[9]曹远志.旋转整流器式航空同步电机起动过程的研究[D].南京∶南京航空航天大学,2007∶46-52.
[10]顾毅康.电磁式无刷交流同步电机新型起动方案研究[D].南京∶南京航空航天大学,2002∶42-56.
[11]李亚楠.三级式同步电机变频交流起动/发电系统的研究[D].南京∶南京航空航天大学,2011∶23-27.
[12]徐瑜,宁银行,刘闯.一种两级式起动/发电电源系统的起动方式研究[J].中国电机工程学报,2013,33(27)∶161-167. XUYu,NINGYinhang,LIUChuang.Startstrategiesforatwostagestarter-generatorpowersystem[J].Proceedingsofthe CSEE,2013,33(27)∶161-167.
[13]马鹏,刘卫国,骆光照,等.一种三级式航空无刷同步电机起动控制策略[J].电机与控制学报,2012,16(11)∶29-32. MAPeng,LIUWeiguo,LUOGuangzhao,etal.Startingcontrol strategyforthree-stageaviationbrushlesssynchronousmotor[J]. ElectricMachinesandControl,2012,16(11)∶29-32.
[14]王瑾,严仰光.旋转整流器式无刷交、直流发电机谐波电枢反应研究[J].南京航空航天大学学报,2000,32(3)∶257-262. WANGJin,YANYangguang.StudyonharmonicarmaturereactionofbrushlessAC&DCgenerator[J].JournalofNanjingUniversityofAeronautics&Astronautic,2000,32(3)∶257-262.
[15]马晓荷,沈颂华.交流励磁机带三相半波整流器负载的一种简化瞬态特性分析方法[J].电工技术学报,2009,24(1)∶52 -58. MAXiaohe,SHENSonghua.Asimplifieddynamiccharacteristic analysismethodonACexciterwiththreephaseshalf-waverotatingrectifierload[J].TransactionsofChinaElectrotechnicalSociety,2009,24(1)∶52-58.
[16]TANEJADN,HUANGHao,PADGETTGA,etal.Dual-structuredaircraftenginestarter/generator∶US,2008/0093850A1 [P].2008.
[17]HUANGHao,KARIPIDESDD,ABBASM,etal.Aircraftengine starter/generatorandcontroller∶US,7821145[P].2009.
[18]HUANGHao,GATARIES,KARIPIDESDD,etal.Aircraftenginestarting/generatingsystemandmethodofcontrol∶US,8148834[P].2010.
(编辑∶张诗阁)
Torqueripplereductioninthree-stagebrushlesssynchronousmachines
MAPeng,LIUWei-guo,MAOShuai,LUOGuang-zhao
(SchoolofAutomation,NorthwesternPolytechnicalUniversity,Xi'an710072,China)
∶Consideringthelargetorquerippleandpoorstartperformancewithloadwhicharecausedby theexcitationcurrentpulsationofthemaingeneratorintheelectricstartprocessofthree-stagebrushless synchronousmachines,theimpactoftheexcitationcurrentpulsationwasanalyzedonoperatingcharacteristicsofthemaingeneratoranddistributioncharacteristicsofoutputvoltagevectorerrorcausedbyharmoniccurrentswhenvectorcontrolstrategywasadopted.Inordertoimprovethestartperformanceofthe three-stagebrushlesssynchronousmachinewithload,astartcontrolmethodwasproposedusingthepolar coordinatetodeterminetheoutputvoltagevector.Comparedwiththetraditionalvectorcontrolstrategy,thismethoddoesnotproduceamplitudeerror,butonlysmallangleerror,ofthevectorvoltage.Theexperimentalresultsshowthat,ataspeedof100r/min,theelectricstartsystemadoptingthenewmethod canoperatesteadilywithaloadof40N.m,whileforthetraditionalvectorcontrolmethod,itisonly 5N.m.Therefore,thenewmethodismoresuitableforthelowspeedandheavyloadoperatingconditionsatthestartmodeofaircraftengines.
∶three-stagesynchronousmachine;aircraftengine;excitationpulsation;startcontrol;torque ripplereduction
∶TM341
∶A
∶1007-449X(2015)11-0098-06
∶2014-09-21
∶国家自然科学基金(51277152)
∶马 鹏(1984—),男,博士研究生,研究方向为多级电励磁无刷同步电机伺服控制;
刘卫国(1960—),男,博士,教授,博士生导师,研究方向为永磁电机设计理论及驱动控制技术;
毛 帅(1989—),男,博士研究生,研究方向为电励磁同步电机驱动控制技术;
骆光照(1972—),男,博士,教授,博士生导师,研究方向为永磁同步电机驱动控制技术。
∶马 鹏
DOI∶10.15938/j.emc.2015.11.015
猜你喜欢
大电机技术(2022年3期)2022-08-06
中国特种设备安全(2022年3期)2022-07-08
河北电力技术(2021年2期)2021-07-29
防爆电机(2020年6期)2020-12-14
电子制作(2018年1期)2018-04-04
光学精密工程(2016年3期)2016-11-07
电测与仪表(2016年23期)2016-04-12
舰船科学技术(2015年8期)2015-02-27
大电机技术(2015年5期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01