改进转速辨识方法用于矩阵变换器交流调速
2015-01-04 01:33夏益辉张晓锋乔鸣忠魏永清朱鹏海军工程大学电气工程学院湖北武汉430033
电机与控制学报 2015年11期
关键词:积分
夏益辉,张晓锋,乔鸣忠,魏永清,朱鹏(海军工程大学电气工程学院,湖北武汉 430033)
改进转速辨识方法用于矩阵变换器交流调速
夏益辉,张晓锋,乔鸣忠,魏永清,朱鹏
(海军工程大学电气工程学院,湖北武汉 430033)
∶传统的参考磁链和估计磁链分别通过电机的电压模型和电流模型直接积分获得,但积分存在累计误差大和响应延时等缺点,使得磁链观测结果不够快速准确,导致转速辫识和系统调速性能不是很理想。为克服这一缺点,提出将线性预测控制与模型参考自适应相结合的转速辫识方法。预测控制原理简单,易于实现,通过简单的超前一个采样周期预测,即可实现参考磁链和估计磁链的无差拍控制。仿真结果表明,基于预测控制和模型参考自适应的转速辫识方法应用于矩阵变换器驱动感应电机具有较好的转速辫识和系统调速性能,克服了积分方法获得磁链信息存在的缺点。关键词∶模型参考自适应系统;转速辫识;预测控制;积分;矩阵变换器
0 引言
矩阵变换器作为一种新型的电力电子变换装置,具有输人电流正弦、功率因数可调、能量可双向流动和功率密度高等优点,成为当前交流调速技术研究的一个热点。近些年来,随着对其研究的不断深人,在输人滤波器设计、调制算法、换流方法和驱动电机调速等方面取得了一定的成果[1-10]。其中在驱动电机调速方面,有速度传感器的矢量控制和直接转矩控制已经成功应用于矩阵变换器驱动电机[11-14],但对无速度传感器的矢量控制和直接转矩控制应用于矩阵变换器研究还不多[15]。
无速度传感器的电机调速方法由于不需要速度传感器,降低了系统成本及维护费用,使得很多学者对其展开了理论研究。目前,已有多种无速度传感器的转速估计方法被提出[16],如转差频率计算法、模型参考自适应、Luenberger观测法和扩展卡尔曼滤波器法等。转差频率计算法通过电机数学模型在线计算定子旋转频率和转差旋转频率,进而获得电机旋转速度,该方法为开环估计,对电机参数的准确性要求比较高;模型参考自适应是通过比较参考模型转子磁链和自适应模型转子磁链,不断调整自适应模型的输出,使其与参考模型相等,达到转速辨识的目的,该方法在低速时受电机参数影响较为明显;Luenberger观测法是一种基于转速自适应磁链观测器原理的改进转速估计方法,它采用被控对象的全阶或降阶模型,通过反馈增益矩阵来校正估计状态,达到电机转速辨识的目的,该方法需求解增益矩阵,其性能受电机定子和转子电阻影响较大;扩展卡尔曼滤波器法是一种全阶随机观测器,它通过使用含有噪声的信号对非线性动态系统进行实时递推最优状态估计,该方法计算十分复杂,运算量比较大,其性能同样受电机参数变化的影响。相比于其它方法,模型参考自适应算法由于原理比较简单,易于实现,同时转速估计精度和动态性能比较好,是当前应用比较多的一种转速辨识方法。该方法中传统的获得转子磁链信息是直接对磁链微分方程进行积分,积分导致计算结果累计误差大和动态响应慢。预测控制作为一种超前拍控制方法,通过当前时刻采集到的电机状态信息来预测未来时刻电机的工作状态,该方法克服了矩阵变换器的延时作用,可以达到对转子磁链信息无差拍估计,提高了转子磁链观测的性能[17]。
本文首先对电机模型和模型参考自适应的转速辨识方法进行了分析;其次,建立了对转子参考磁链和估计磁链的预测控制实现的数学模型;再次,分析了基于预测控制和模型参考自适应速度辨识方法结合间接矢量控制调速方法实现系统调速的基本原理;最后,对所提电机转速辨识方法与间接矢量控制方法结合应用于矩阵变换器驱动感应电机的调速性能和转速估计性能进行了仿真研究。仿真结果表明所提转速辨识方法具有较好的稳态精度和动态响应性能,同时将间接矢量控制应用于矩阵变换器驱动感应电机进行电机调速具有较好的调速性能。
1 感应电机数学模型和模型参考自适应转速辨识原理
1.1 感应电机数学模型
对于三相感应电机,其数学模型在两相静止坐标系为∶
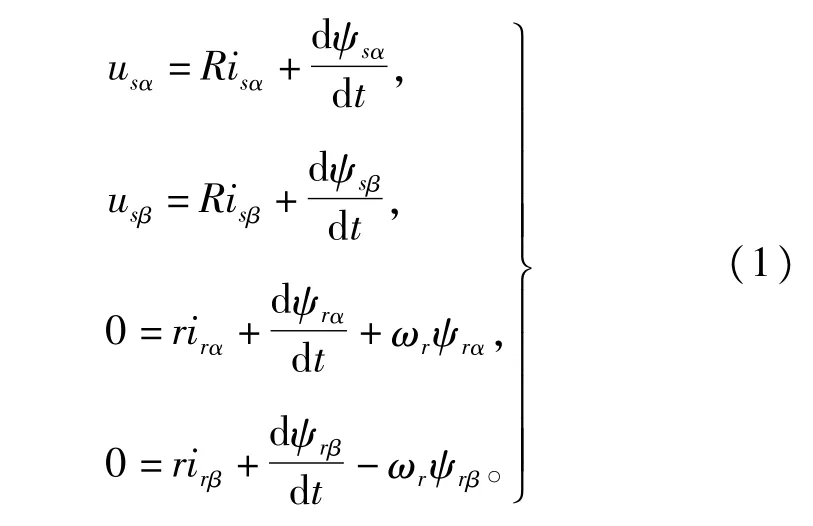
其中,R、r和ωr分别为定子电阻、转子电阻和转子旋转速度。
定子磁链和转子磁链为∶
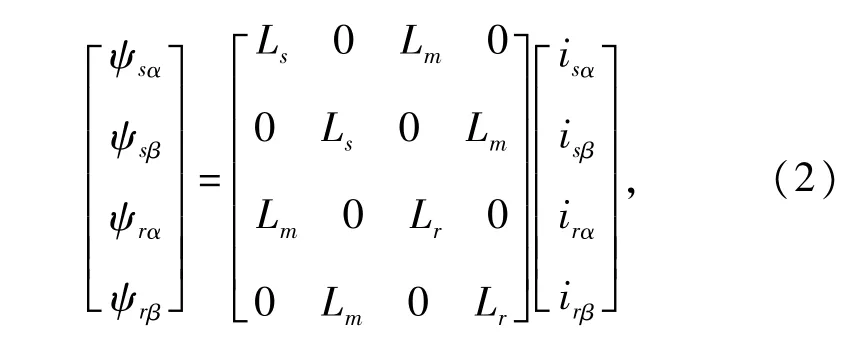
其中,Ls、Lm和Lr分别为定子电感、定转子互感和转子电感。由式(1)和式(2)可得基于电压模型和电流模型观测转子磁链的表达式分别为式(3)和式(4)∶
1.2 模型参考自适应转速估计原理
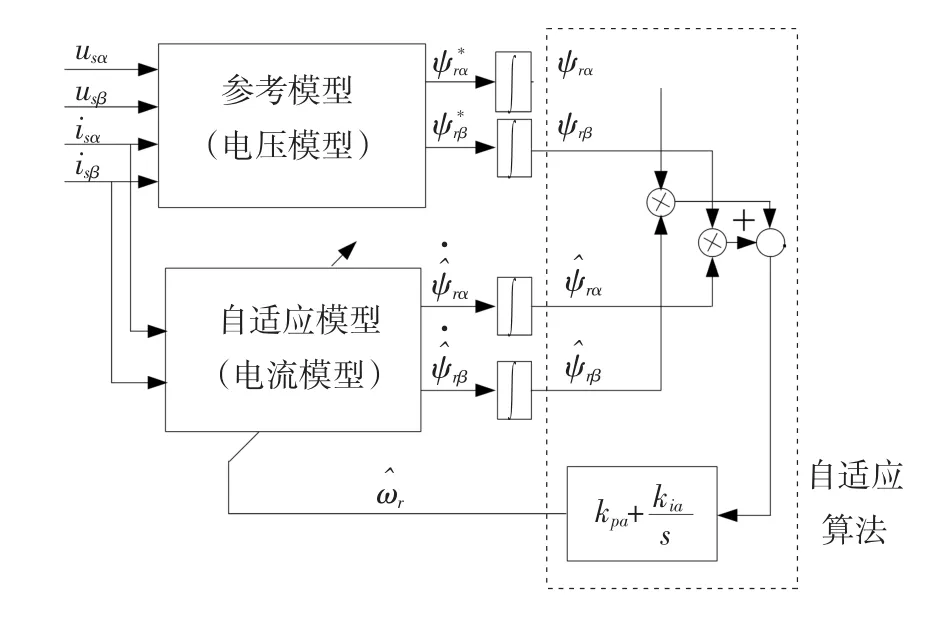
图1 模型参考自适应转速估计原理图Fig.1 Theprincipalchartofmodelreferenced adaptivespeedestimated
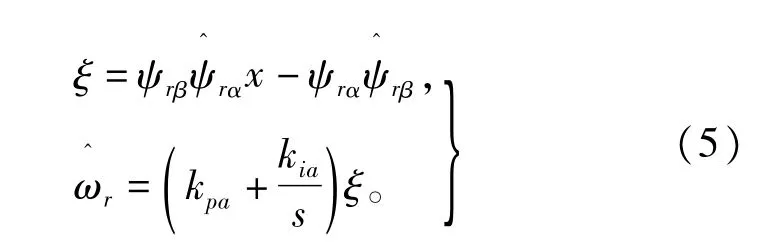
自适应算法中根据Popov超稳定性理论采用简单的PI控制器如图1,转速估计关系式为∶
2 基于模型预测控制的转子磁链无差拍跟踪
对于式(3)和式(4),传统的方法是通过积分获得转子磁链信息,由于实际电机参数很难获得,且随着电机长时间运行会发生变化,积分会产生累计误差和响应延时,降低磁链观测的精度和速度。模型预测控制由于采用当前时刻电机状态信息预测未来时刻电机运行状态,其只与当前时刻信息有关,不会产生累计误差,同时响应比较快,克服了积分运算获得磁链信息的缺点。
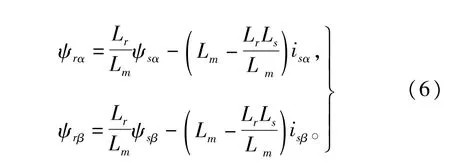
由式(1)和式(2)可得∶
由式(1)和式(6)采用超前一拍离散化后得∶
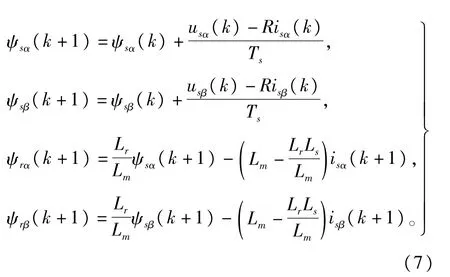
由于开关周期很小,定子电流变化不大,isα(k+ 1)≈isα(k),isβ(k+1)≈isβ(k),上式可以等价为∶
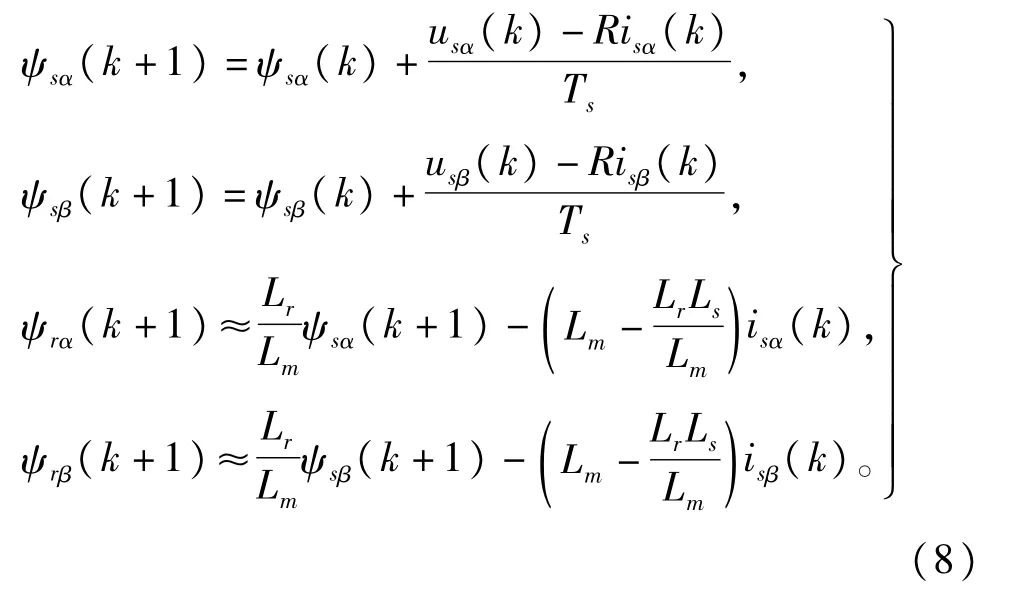
对式(4)采用超前一拍进行离散化后得∶
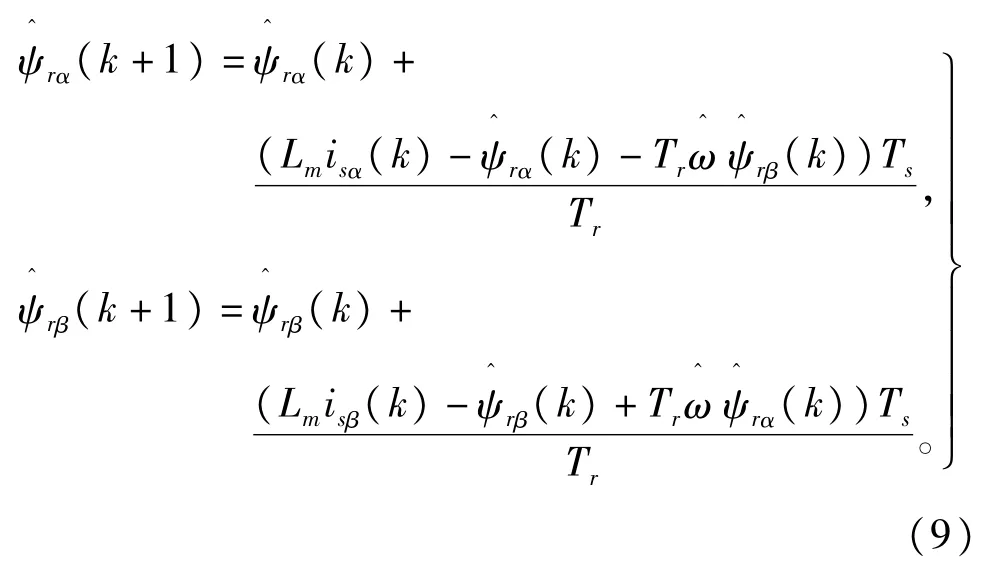
式(8)和式(9)分别为采用超前一拍预测控制获得的参考磁链和估计磁链,由于不存在积分,不会产生累计误差和响应延时,提高了磁链观测的精度和速度。
3 间接矢量控制原理
转子磁链反馈信号由磁链观测模型式(3)或式(4)获得,其幅值和相位受电机参数Tr和Lm变化的影响,很难准确获得,鉴于此,采用磁链开环、转速闭环的间接矢量控制方式调速,利用式(10)和式(11)即可实现转差型的矢量控制系统。
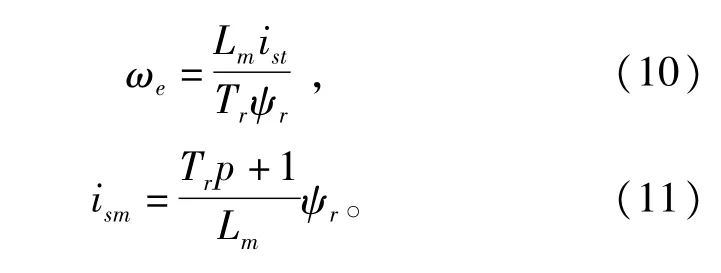
其中,ωe为转差角频率,Ψr为转子磁链幅值,p为微分算子,ism、ist分别为旋转坐标系反馈定子电流励磁分量和转矩分量。
图2为基于预测控制和模型参考自适应转速辨识的间接矢量控制原理图。间接矢量控制系统不仅继承了基于稳态模型转差频率控制系统的优点,同时利用基于动态模型的矢量控制规律克服了它大部分的不足。
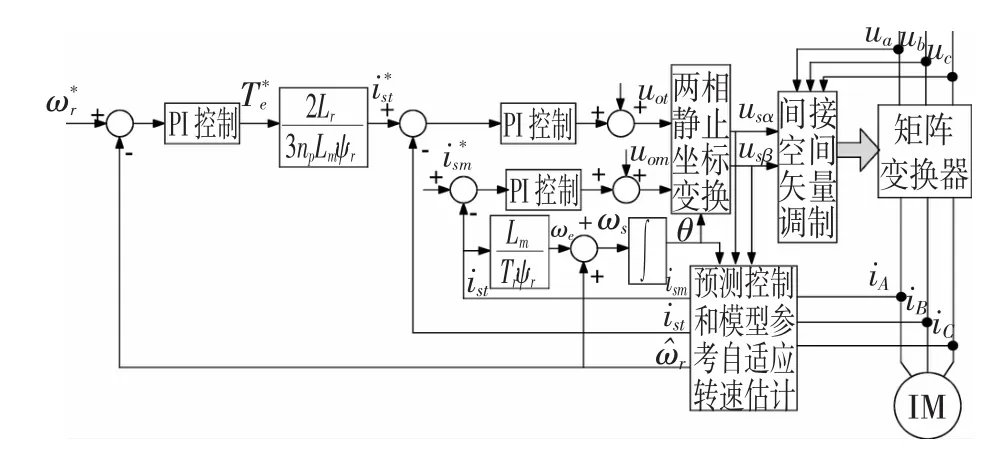
图2 间接矢量控制原理图Fig.2 Theprincipalchartofindirectvectorcontrol
上图中∶
4 仿真验证
为了验证所提磁链计算方法和模型参考自适应系统转速辨识方法用于矩阵变换器驱动感应电机无速度传感器间接矢量控制调速的正确性,对其进行了仿真验证。电机参数为∶额定电压380V,额定频率50Hz,额定功率1.1kW,定子电阻R=5.61Ω,定子电感Ls=0.482mH,转子电阻r=5.52Ω,转子电感Lr=0.482mH,定转子互感Lm=0.453mH,转动惯量J=0.03kgm2,极对数np=2;矩阵变换器相关参数为∶输人滤波器电感2mH,电容10μF,阻尼电阻50Ω,开关频率5kHz。
1)空载性能
图3为空载时估计转速、反馈转速及定子A相电流波形,开始时给定转速300r/min,1s时刻给定转速调整为600r/min。在给定转速为300r/min时的转速上升阶段,估计转速上升比较平滑,实现了电机的平稳启动,0.3s后系统达到稳态,估计转速、反馈转速均很好的稳定在给定转速;当给定转速为600r/min时,估计转速和反馈转速上升平稳且估计转速很好的跟踪了反馈转速,估计转速0.16s后达到稳态,实际转速0.3s后达到稳态,估计转速较实际转速先达到稳态,保证了系统的稳定性。仿真结果表明基于预测控制和模型参考自适应系统的转速辨识方法具有良好的稳态和动态性能。
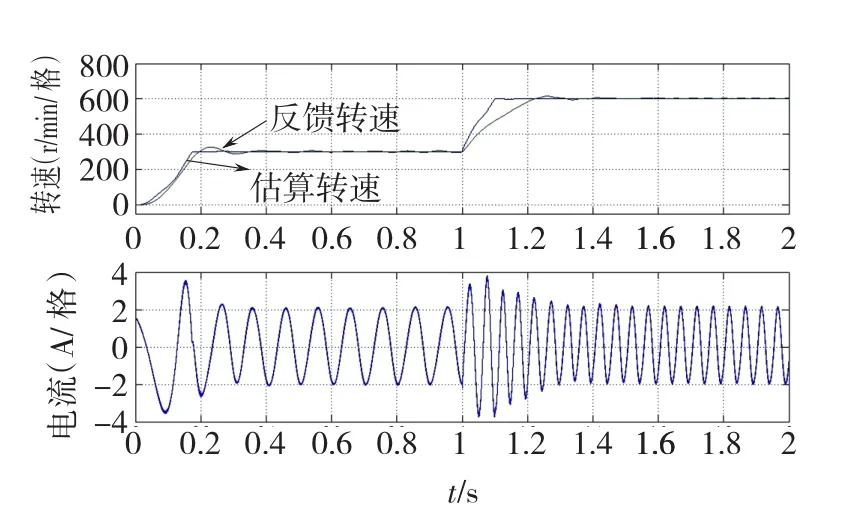
图3 电机转速和电流波形Fig.3 Thewaveformsofrotorspeedandstatorcurrent
图4为α、β轴转子估计磁链与实际磁链波形。由图可知,估计磁链响应比实际磁链快,保证了估计转速比实际转速提前达到稳态,进而确保了整个系统的稳定性;在稳态时,估计磁链与实际磁链已经基本吻合,估计转速就即是实际转速;在转速上升阶段,由于实际磁链与估计磁链误差较大,导致估计转速跟踪实际转速精度降低。说明采用预测控制获得转子磁链信息,较传统的积分运算[17]具有更好的稳态精度和动态性能,同时也说明转速辨识性能好坏与转子估计磁链能否准确跟踪实际磁链有密切关系。
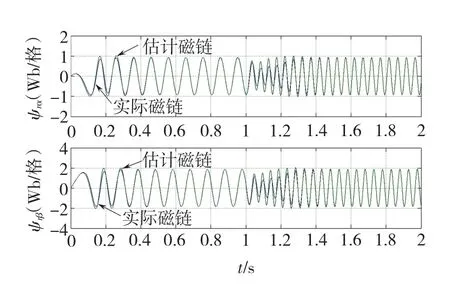
图4 α、β轴转子实际磁链与估计磁链Fig.4 Thewaveformsofactualrotorfluxand estimatedfluxinα-βcoordinate
2)负载性能
图5为1s时刻电机突加负载时的估计转速、反馈转速及定子三相电流波形。1s前系统达到稳态,估计转速和反馈转速均很好的稳定在给定转速;1s时刻,电机突加负载,估计转速变化不大,实际转速略微下降,但很快恢复到给定转速附近,说明所提转速辨识方法具有较强的抗负载扰动能力。
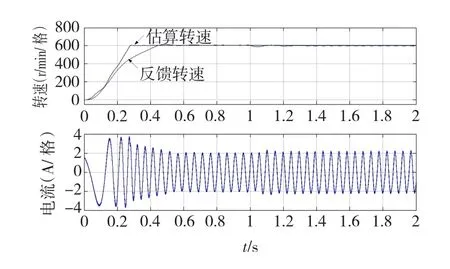
图5 电机转速和电流波形Fig.5 Thewaveformsofrotorspeedandstatorcurrent
图6为转子估计磁链与实际磁链波形。当电机突加负载时,转子估计磁链与实际磁链变化均很小,其幅值均稳定在0.927(额定工况下磁链峰值)附近,同时转子估计磁链很好的跟踪了真实磁链,保证了转速辨识的准确性。
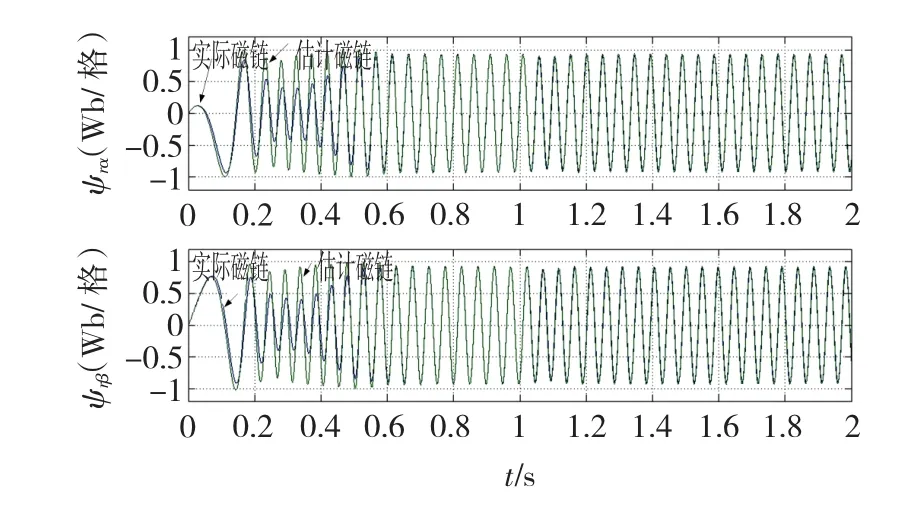
图6 α-β轴转子实际磁链与估计磁链Fig.6 Thewaveformsofactualrotorfluxand estimatedfluxinα-βcoordinate
5 结论
模型参考自适应系统转速辨识方法中须获得转子参考磁链和估计磁链,针对传统方法由电机数学模型直接积分存在计算误差大和响应速度慢的缺点,提出模型预测控制。通过对基于预测控制和模型参考自适应系统相结合的转速辨识方法用于矩阵变换器驱动感应电机采用间接矢量控制调速进行仿真研究,可以得出如下结论∶
1)相比积分方法获得磁链信息,预测控制具有更好的稳态精度和动态响应速度;
2)基于模型参考自适应的转速辨识方法估计转速精度高、响应快,转速上升平稳且超调量小,表现出良好的转速估计性能;
3)基于预测控制和模型参考自适应相结合的转速辨识方法应用于矩阵变换器驱动感应电机进行无速度间接矢量调速控制是切实可行的。
∶
[1]孙凯,周大宁,梅杨.矩阵式变换器技术及其应用[M].北京∶机械工业出版社,2007.
[2]ALESINAA,VENTURINIMGB.Analysisanddesignofoptimum-amplitudenine-switchdirectAC-ACconverters[J].IEEE TransactionsonPowerElectronics,1989,4(1)∶101-112.
[3]ISHIGUROA,OKUMAS.Anovelcontrolmethodforforcedcommutatedcycloconvertersusinginstantaneousvaluesofinputline-tolinevoltages[J].IEEETransactionsonIndustrialElectronics,1991,38(3)∶166-172.
[4]CASADEID,SERRAG,TRENTINA,etal.Matrixconverter modulationstrategy∶anewgeneralapproachbasedonspace-vector representationoftheswitchstate[J].IEEETransactionsonIndustrialElectronics,2002,49(2)∶370-381.
[5]HELLEL,LARSENKB,JORGENSENAH,etal.Evaluationof modulationschemesforthree-phasetothree-phasematrixconverters[J].IEEETransactionsonIndustryElectronics,2004,51(1)∶158-171.
[6]XIAChangliang,ZHAOJiaxin,YANYan,etal.Anoveldirect torqueandfluxcontrolmethodofmatrixconverter-fedPMSM drives[J].IEEETransactionsonPowerElectronics,2014,29(10)∶5417-5430.
[7]林桦,佘宏武,何必,等.矩阵变换器的电压型两步换流策略[J].中国电机工程学报,2009,29(30)∶36-41. LINHua,SHEHongwu,HEBi,etal.Two-stepcommutationstrategiesformatrixconverter[J].ProceedingsoftheCSEE,2009,29(3)∶36-41.
[8]张晓锋,何必,林桦,等.矩阵变换器的一种安全换流策略[J].中国电机工程学报,2008,28(18)∶12-17. ZHANGXiaofeng,HEBi,LINHua,etal.Safecommutationstrategiesformatrixconverter[J].ProceedingsoftheCSEE,2008,28(18)∶12-17.
[9]何必,林桦,张晓锋,等.电流控制型矩阵变换器抑制共模电压控制策略[J].中国电机工程学报,2007,27(25)∶90-96. HEBi,LINHua,ZHANGXiaofeng,etal.Amodulationstrategyto reducecommon-modevoltageforcurrent-controlledmatrixconverters[J].
[10]CASADEID,SERRAG,TANIA,etal.Optimaluseofzero vectorsforminimizingtheoutputcurrentdistortioninmatrixconverters[J].IEEETransactionsonIndustrialElectronics,2009,56(2)∶326-336.
[11]范蟠果,杨耕.感应电机无速度传感器控制自适应速度观测器[J].电机与控制学报,2008,12(6)∶621-628. FANPanguo,YANGGeng.Adaptivespeedobserverforspeed sensorlesscontrolofinductionmotor[J].ElectricMachinesand Control,2008,12(6)∶621-628.
[12]王高林,陈伟,杨荣峰,等.无速度传感器感应电机改进转子磁链观测器[J].电机与控制学报,2009,13(5)∶638-642. WANGGaolin,CHENWei,YANGRongfeng,etal.Improvedrotorfluxestimateforsensorlessinductionmotor[J].ElectricMachinesandControl,2009,13(5)∶638-642.
[13]王晶鑫,姜建国.基于磁场定向的矩阵变换器驱动感应电机变结构直接转矩控制[J].中国电机工程学报,2010,30(6)∶57-62. WANGJingxin,JIANGJianguo.Variable-structureDTCcontrol forinductionmotordrivenbyamatrixconverterbasedonfieldoriented[J].ProceedingsoftheCSEE,2010,30(6)∶57-62.
[14]王晶鑫,姜建国.矩阵变换器驱动感应电机转矩和转子磁链控制[J].电机与控制学报,2007,14(7)∶59-65. WANGJingxin,JIANGJianguo.Torqueandrotorfluxcontrolfor inductionmotorfedbymatrixconverter[J].ElectricMachines andControl,2007,14(7)∶59-65.
[15]LEEKyobeum,BLAABJERGF.SensorlessDTC-SVMforinductionmotordrivenbyamatrixconverterusingaparameterestimationstrategy[J].IEEETransactionsonIndustrialElectronics,2008,55(2)∶512-522.
[16]王成元,夏加宽,杨俊友,等.电机现代控制技术[M].北京∶机械工业出版社,2007.
[17]王晶鑫,姜建国.基于预测算法和变结构的矩阵变换器驱动感应电机无差拍直接转矩控制[J].中国电机工程学报,2010,30(33)∶65-70. WANGJingxin,JIANGJianguo.AdeadbeatDTCcontrolstrategy withpredictionalgorithmandvariablestructurecontrollerforinductionmotordrivenbymatrixconverter[J].Proceedingsofthe CSEE,2010,30(33)∶65-70.
(编辑∶张诗阁)
Improvedspeedestimationmethodapplyingto ACspeed-controlofmatrixconverter
XIAYi-hui,ZHANGXiao-feng,QIAOMing-zhong,WEIYong-qing,ZHUPeng
(CollegeofElectricEngineering,NavalUniversityofEngineering,Wuhan430033,China)
∶Traditionalrotorfluxinformationisobtainedbyusingintegralcontrolbasedonvoltagemodel andcurrentmodel,whichresultsinrotorfluxwithlargeerrorandlowresponsespeed,andlowprecision andlowresponsespeedofestimatedspeed.Toavoidthedefectsoftherotorfluxinformationobtainedby integralcontroller,theestimatedspeedmethodwithcombiningpredictivecontrolwithmodelreferenced adaptivesystemwasputforward.Thepredictivecontrolhasadvantagesofsimpleprincipleandeasytorealize,thedeadbeatcontrolofthereferencedrotorfluxandmodelrotorfluxcanberealizedbysimplypredictingaheadofonesampleperiod.Thesimulatedresultsindicatethatthesystemnotonlyhasgoodperformancesoftheestimatedspeedbutalsoofspeedregulationbyusingproposedestimatedspeedmethod whenapplyingtoindirectvectorcontrolofinductionmotorfedbymatrixconvert.
∶modelreferenceadaptivesystem;speedestimation;predictivecontrol;integral;matrixconverter
∶TM452
∶A
∶1007-449X(2015)11-0092-06
∶2013-08-28
∶国家自然科学基金(51277177,51307180,51407188,51507183)
∶夏益辉(1987—),男,博士,讲师,研究方向为电力电子与电力传动;
张晓锋(1963—),男,教授,博士生导师,研究方向为船舶电力系统自动化;
乔鸣忠(1971—),男,教授,博士生导师,研究方向为电机设计和电力电子与电力传动;
魏永清(1979—),女,博士,讲师,研究方向为电力电子与电力传动;
朱 鹏(1984—),男,博士,讲师,研究方向为电力电子与电力传动。
∶乔鸣忠
DOI∶10.15938/j.emc.2015.11.014
猜你喜欢
卷宗(2016年10期)2017-01-21
中学课程辅导·教师教育(上、下)(2016年20期)2016-12-01
数学学习与研究(2016年19期)2016-11-22
考试周刊(2016年65期)2016-09-22
考试周刊(2016年59期)2016-08-23
科教导刊·电子版(2016年21期)2016-08-23
大学教育(2016年6期)2016-07-06
中国市场(2016年18期)2016-06-07
考试周刊(2016年20期)2016-04-14
教育教学论坛(2015年2期)2015-12-11