负载转矩前馈的电励磁同步电机定子磁链定向矢量控制
2015-01-04 01:33尚敬年晓红刘可安南永辉中南大学信息科学与工程学院湖南长沙40004南车株洲电力机车研究所有限公司湖南株洲400
电机与控制学报 2015年11期
尚敬,年晓红,刘可安,南永辉(.中南大学信息科学与工程学院,湖南长沙 40004;.南车株洲电力机车研究所有限公司,湖南株洲 400)
负载转矩前馈的电励磁同步电机定子磁链定向矢量控制
尚敬1,2,年晓红1,刘可安2,南永辉2
(1.中南大学信息科学与工程学院,湖南长沙 410004;2.南车株洲电力机车研究所有限公司,湖南株洲 412001)
∶针对大功率交直交冶金轧机主传动系统对电励磁同步电机控制的高性能要求,以定子磁链定向矢量控制为基础,提出了一种混合型气隙磁链观测方法,其低速段采用电流模型,中高速提出基于速度补偿的新型改进型电压模型,可在全速度范围内很好的观测出电机定子磁链。提出了一种基于降阶状态观测器的模糊自适应负载转矩观测方法,利用观测到的负载转矩电流进行前馈补偿来改善动态性能。仿真和实验结果表明所提出的控制策略的有效性。
∶电励磁同步电机;定子磁链;负载转矩观测;模糊控制;矢量控制
0 引言
电励磁同步电机(ElectricallyExcitedSynchronousMotor,EESM)具有高功率因数、高效率、强过载能力等优点,广泛应用在冶金轧机主传动等大功率、高性能传动领域[1-2]。在冶金轧机传动中,磁链观测和负载转矩观测是EESM的两个关键控制技术。
EESM的磁链观测方案主要分为两大类∶1)基于电机数学模型方案;2)基于状态观测器方案。数学模型方案有电压模型方案、电流模型方案和混合模型方案。一般低速采用电流模型,中高速采用电压模型,但是传统的电压模型存在着直流偏置和初始值误差积累问题。文献[3]中提出带饱和反馈的低通滤波器代替纯积分环节的电压模型磁链方法,但存在限幅值设计困难等问题。文献[4]中新电压模型把积分器置于内环中,通过对反电势的积分得到磁链的幅值,对同步转速进行积分得到磁链的相位角,存在着在转速变化、转矩突变过程中动态性能较差的缺点。文献[5]采用了一种低速电流模型和高速时的新电压模型结合的混合模型辨识EESM气隙磁链,其新电压模型和文献[4]描述的方法基本相同。文献[6]提出一种二阶广义积分器的气隙磁链观测方法。文献[7]提出了适用于全速范围的全阶闭环气隙磁链观测器,阐明了其内部基于滤波器特性的电流-电压模型之间的平滑切换机理。这些算法动态效果不太理想,难于满足负载变化剧烈的场合。
负载转矩观测并进行前馈补偿主要目的是抑制冶金轧制过程中因负载变化造成的速度波动。文献[8-10]介绍了滑模转矩观测方法在电机控制中的应用;但滑模控制器中存在抖振问题。文献[11]建立了全阶状态观测器和基于Kalman滤波器的负载转矩观测器,根据测量的电流、机械位置和转速等参数对负载转矩进行估计;Kalman滤波器缺点是设计复杂且计算量大,难以工业应用。文献[12]设计了一种基于状态观测器的自适应控制辨识负载转矩。文献[13]提出了一种结合滑模控制的模型参考自适应扰动观测器,能够辨识出永磁电机负载转矩和转动惯量。文献[14]描述一种外扰负载观测器在抑制轧钢扰动中的应用。
本文以EESM在交直交冶金轧机主传动应用为研究背景,在定子磁链定向矢量控制下,结合文献[4-6]的方法,提出一种低速采用电流模型、中高速基于转速补偿的改进型电压模型的磁链观测方法。为抑制动态速降,提出了一种基于降阶状态观测器的模糊自适应负载转矩观测方法。通过仿真和实验验证了控制方案的有效性。
1 交直交冶金轧制传动系统
交直交冶金轧机传动系统框图如图1所示,主要由变压器、网侧变流器(变流器1、2)、网侧控制器、机侧变流器(变流器3、4)、机侧控制器、同步电机(EESM1、EESM2)和励磁单元组成。变压器的次边采用双绕组可以降低10kV网侧谐波,每个次边绕组分别输出3kV电压为网侧变流器供电。网侧和机侧变流器都采用二极管钳位式三电平拓扑结构。网侧控制器控制网侧变流器工作在直流电压闭环模式下,为传动系统提供稳定的直流电压。机侧控制器协调控制机侧变流器和励磁单元,根据工艺要求使EESM工作在速度闭环模式下,为传动系统提供动力。两台EESM的控制策略基本相同,仅以一台电机为例进行阐述。
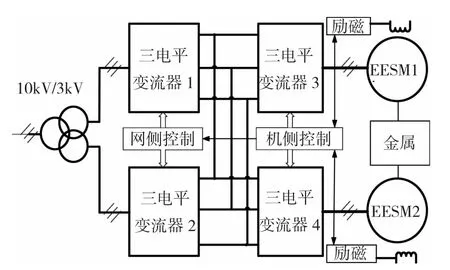
图1 交直交轧机传动系统框图Fig.1 DiagramofAC-DC-ACrolldrivesystem
2 电励磁同步电机定子磁链定向矢量控制
2.1 EESM的数学模型
EESM磁链定向方法有∶转子磁链定向、定子磁链定向、气隙磁链定向和阻尼磁链定向。阻尼磁链观测模型过于复杂,在实际应用中很少采用;转子磁链定向方式缺点是当负载增加时,定子电压升高,功率因数降低;采用定子磁链定向和气隙磁链定向均可实现高功率因数运行和宽调速范围[1-2,7]。本文采用定子磁链定向,EESM在定子磁链定向下的空间矢量如图2所示。定子磁链定向下,EESM在MT轴系下电压方程∶
电机转矩方程∶

式中∶usm和ism分别为M轴定子电压和电流;ust和ist分别为T轴定子电压和电流;Rs为定子电阻;ψs为定子磁链;ωs为电机同步角频率;p为微分因子;Te为电磁转矩;np为电机极对数。
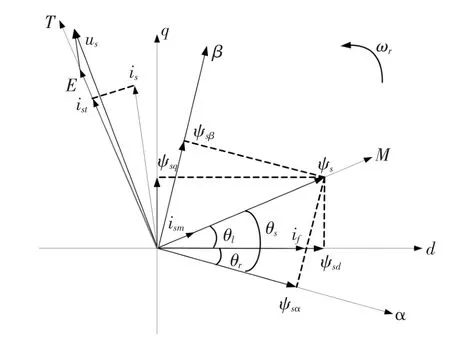
图2 电励磁同步电机定子磁链定向空间矢量图Fig.2 Statorflux-orientedvectorofEESM
2.2 定子磁链观测
结合EESM定子磁链定向的特点,提出一种低速采用电流模型进行磁链观测、中高速基于速度补偿的改进型电压模型进行磁链观测的综合磁链观测方法。
2.2.1 基于电流模型的定子磁链观测
电流模型如式(3)、式(4)所示,式(3)完成定子d、q磁链分量计算,式(4)根据磁链d、q分量和转子角计算出电流模型的定子磁链幅值和定子磁链同步角。
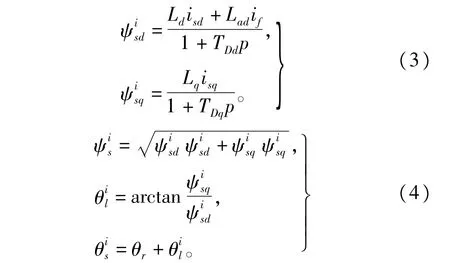
电流模型结构简单,但对电动机参数依赖性强,适用于电动机低速运行的情况。
2.2.2 基于新型电压模型的定子磁链观测
结合文献[4-6]的方法,本文提出一种基于角频率补偿的新型电压模型的定子磁链观测方法。由式(1)可以得到

式中esm,est分别为电机定子电压减去电阻压降后的M轴电压分量和T轴电压分量。根据式(5),并用观测器上标ˆ以区别实际值,可得到
式(6)是在定子磁链定向准确下得到的结论,磁链观测引人校正环节可以提高系统稳定性和动态准确性,本方法根据测量的角频率(与速度成比例)对观测模型进行修正为
式中∶eω为补偿的反电势量;Kp、Ki分别为调节器的比例和积分参数;ωe为实际测量角频率。
式(6)中的磁链计算是基于稳态模型计算得来,为提高动态精度,作为系统输出,设计基于动态幅值补偿的控制为

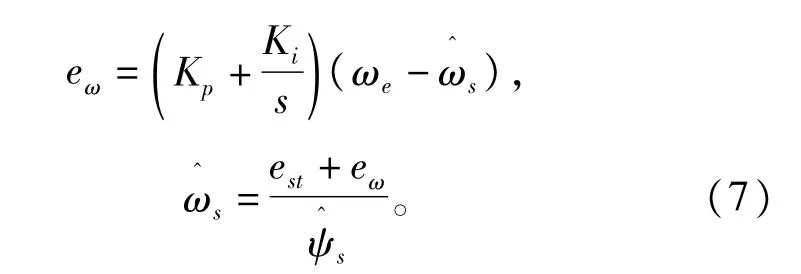
综合式(5)~式(8)得到基于速度补偿的定子磁链电压模型框图,如图3所示。
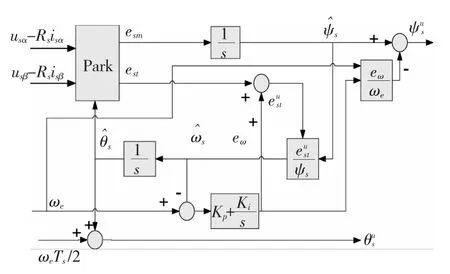
图3 基于速度补偿的新型定子磁链电压模型Fig.3 Thenovelvoltage-modelofEESMstator fluxbasedonspeederrcompensated
图3中,usα、usβ分别为两相静止坐标系下的电压分量,isα、isβ分别为两相静止坐标系下的电流分量。
新型电压模型的特点∶
1)整个结构仅包含定子电阻一个电机参数。
2)输人量为∶usα、usβ、isα、isβ、ωe,相比传统电压模型,增加了测量角频率。,
3)利用测量角频率与估算角频率之差的PI调节器输出对T轴电压和磁链幅值进行补偿,有利提高磁链观测的快速性和稳定性。
2.2.3 综合磁链观测模型
结合电流模型和新型电压模型的特点,本控制方案中采用混合模型进行磁链观测,混合模型如图4所示。当电机速度绝对值小于10%额定速度采用电流模型,并且电流模型的幅值和角度输出作为电压模型初始值;电机速度大于25%采用电压模型;速度在10%~25%时两种模型采用自适应因子系数共同作用。
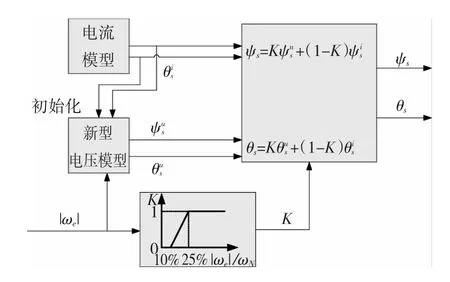
图4 定子磁链混合模型Fig.4 Themixedstatorfluxmodel
2.3 负载转矩观测
机械运动方程∶

式中∶Tl为负载转矩;ωm是旋转角速度;B为摩擦系数;J为转动惯量。
从式(9)可以看出,当负载转矩突然变化时,如果电磁转矩不能及时响应则必然造成转速的较大变化,引人负载观测器进行前馈补偿来有效改善动态速降。本文构造具有自适应调节器的降阶状态观测器进行负载转矩观测。
根据机械方程和降阶观测器原理可以设计EESM的降阶观测器为
式中k1、k2为观测器的增益。
观测器的特征方程∶

选取合适的k1、k2值以满足合适的极点配置,从而满足状态量逼近求解值的速率要求,根据期望的极点α、β,观测器的特征多项式为

则根据式(11)、式(12)可得
根据式(13)可得
利用转速误差经PI调节器输出构造转矩的原理,对上式进行修正定义,可得


零极点的配置和负载的加载时间有关,对于不确定的负载,目前没有统一的极点配置方法,由式(14)~式(16)可知,不同的极点对应不同PI参数,为提高参数自适应能力,采用模糊自适应控制方法自动调节其kp、ki参数。相关模糊控制原理可参照文献[15],本方案模糊控制框图如图5所示。
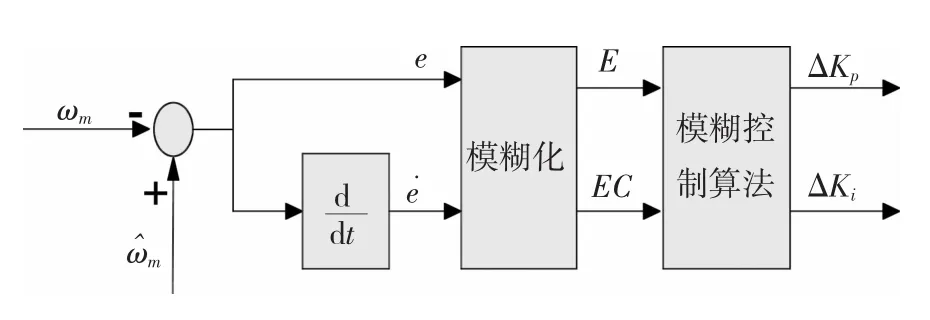
图5 参数自适应模糊控制框图Fig.5 Schematicdiagramoffuzzyparametercontrol
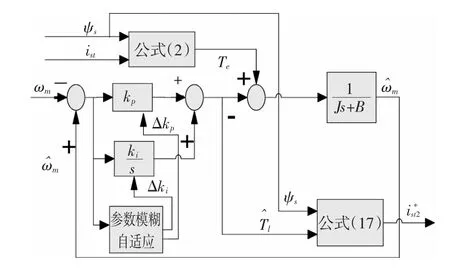
根据式(2)、式(9)、式(15)、式(17)和图5构造的负载转矩电流观测控制框图如图6所示。
2.4 矢量控制

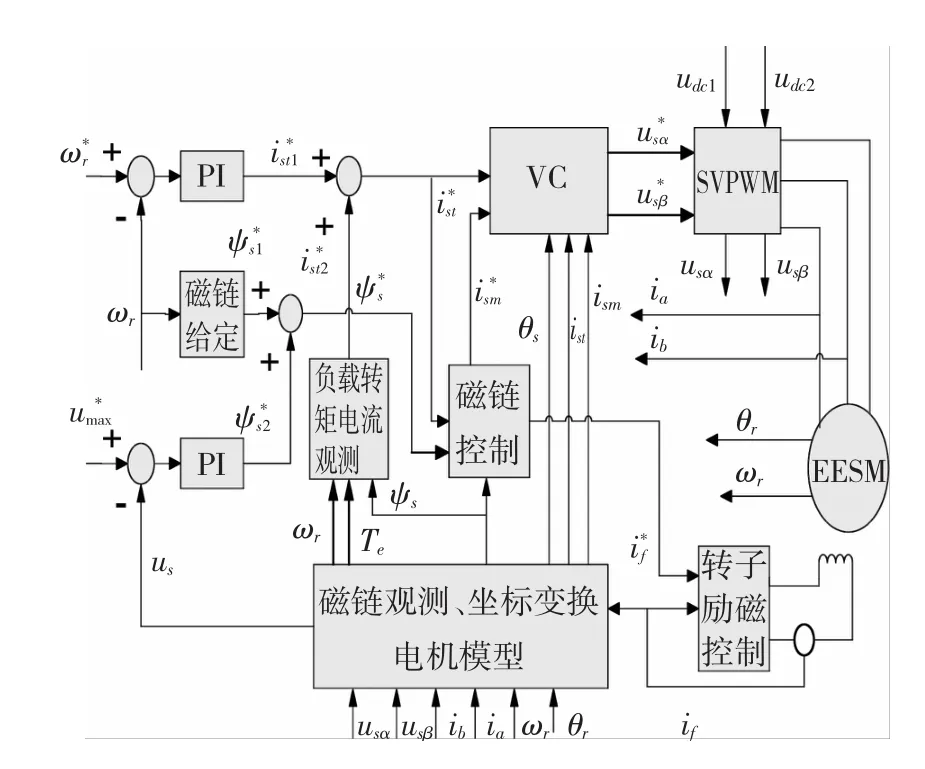
图7 定子磁场定向EESM矢量控制框图Fig.7 VectorcontrolofEESMbased onstatorflux-oriented
3 仿真结果
采用Matlab对控制方案进行仿真以验证方案的有效性,仿真过程中,电机内部参数固定,电机参数根据厂家提供的设计参数确定,主要电机参数∶额定功率为5000kW,额定电压为3050V,额定电流为982A,额定转速为30r/min,定子电阻为0.0583Ω,漏感为8.32mH,d轴互感为45.7mH,q轴互感为28.5mH。
图8~图10分别仿真了3种不同情况的仿真波形,图中从上到下(分别对应第一至第四轴)的定义分别为∶第一轴∶速度给定、带转矩补偿控制方案的速度反馈、不带转矩补偿控制方案的速度反馈;第二轴∶实际负载转矩、观测负载转矩;第三轴∶磁链给定幅值、磁链电流模型α轴分量和本文采用的磁链混合模型方案的α轴分量;第四轴∶带转矩补偿控制的电机A相电流波形。
说明∶第一轴中引人不带转矩补偿的速度反馈是作为效果对比用,仿真中两种方案的其它情况都相同。第二轴中,由于电机参数固定,测量电流和转子角准确,可以认为电流模型观测到的磁链是实际磁链。
图8仿真工况∶从1.5s到2.25s电机从0速加速到9r/min,3s施加额定转矩负载,4.2s开始进行卸载,其中加、减载时间均为150ms。
图9仿真工况∶电机2.8s运行到27r/min,在3s施加额定转矩负载,4s开始进行卸载,其中加、减载时间为50ms。
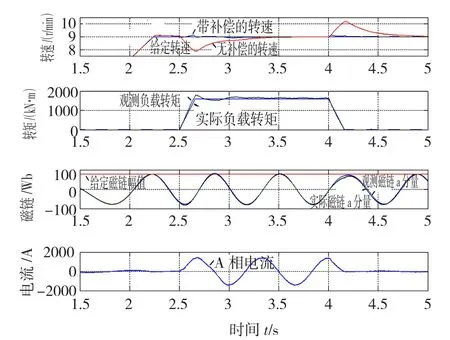
图8 电机速度从0到9r/min波形Fig.8 Waveformwhenthespeedisat fromzeroto9r/min
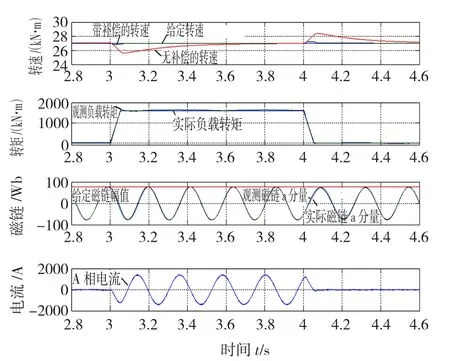
图9 27r/min加减载波形Fig.9 Loadwaveformwhenthespeedisat27r/min
图10仿真工况∶电机2.8s之前已经运行到27r/min并已经完成额定转矩加载,在3s开始带载加速,3.85s加速到45r/min,6s开始带载减速,6.85s减速到27r/min。
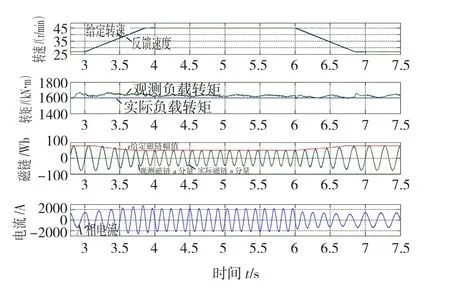
图10 带载加减速工况仿真波形Fig.10 Waveformwhenthemotorisatacceleration anddecelerationprocess
从图8~图10可以看出∶
1)在各种速度范围下、各种加减载工况下,混合磁链都能和实际磁链(电流模型观测到的磁链)基本吻合,从而验证了基于速度补偿的新型电压模型的正确性、稳定性和良好的动态适应性。
2)基于模糊参数自适应的降阶负载转矩观测器能适应不同加载时间的负载,引人负载转矩电流前馈补偿明显改善了控制的动态性能。
3)验证了本文所述的基于定子磁链定向的电励磁同步电机矢量控制方案的正确性和稳定性。
4 实验结果
以集成门极换流晶闸管(IntegratedGateCommutatedThyristors,IGCT)作为功率器件,将自主研发的20MW交直交轧机主传动变频调速系统应用于某热轧线的粗轧机主传动系统中。现场两台同步电机如图11所示。

图11 轧机主传动两台电机Fig.11 ThetwoEESMswhichusedto maindriveforroll
电机控制策略采用本文所述的基于转矩电流前馈的定子磁链定向矢量控制,利用开发的CSR-drive软件监视波形,图12、图13是现场实验波形,分别监视了半桥直流电压、速度(界面中乘以100显示)、负载转矩(单位∶kN.m)、电流等信息。
图12工况∶运行到27r/min时进行加载,负载大约持续2.5s后卸载。
图13工况∶27r/min完成加载后,大约0.7s完成带载加速到36r/min。
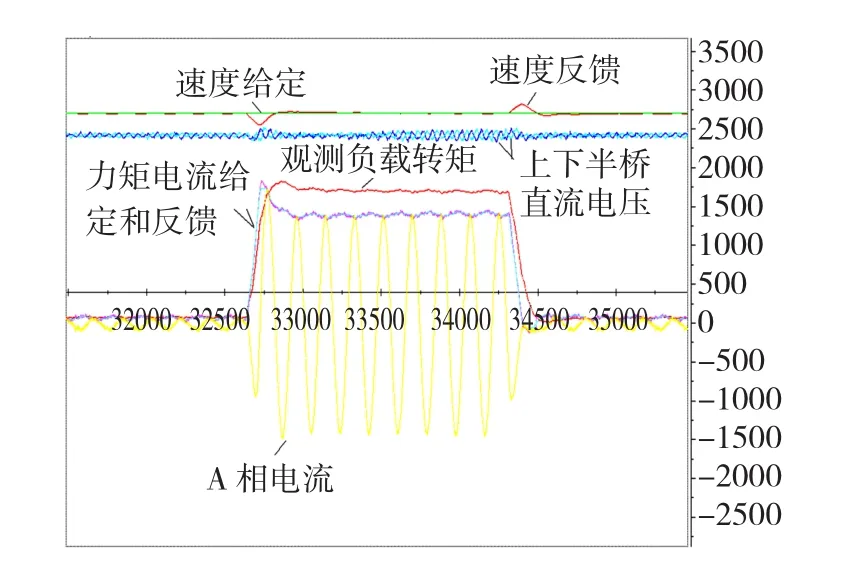
图12 27r/min带转矩前馈补偿加载、卸载Fig.12 Loadchangedwaveformwhentorquecurrent feed-forwardcontrolisadoptedandthe speedisat27r/min
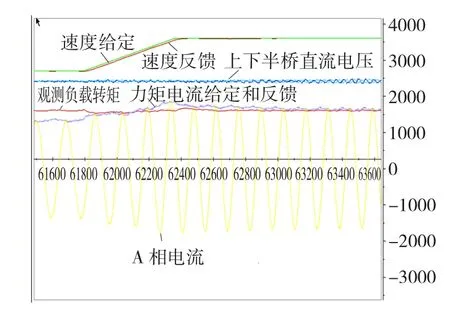
图13 带载加速波形Fig.13 Waveformwhenthemotorisat accelerationwithload
从图12、图13可以看出∶
1)在突然加载时,速度有小幅跌落(约2r/min),然后在300ms内快速恢复到给定速度;卸载时速度有稍微超调(大约1.5r/min)。然后快在250ms内快速恢复到给定速度。
2)电动机在恒速和加速过程中,速度反馈都能很好的跟踪速度给定,电机电流都保持了良好的正弦性。
实验证明了采用负载电流前馈控制方案的有效性。
5 结论
仿真和实验数据证明表明基于负载转矩前馈的定子磁链定向EESM矢量控制系统具有优良的调速性能。采用混合定子磁链观测器,其低速段采用传统的电流模型,中高速提出基于速度补偿的改进型电压模型,该方法能够在全速度范围内精确观测定子磁链;采用模糊参数自适应的降阶观测器观测负载转矩,对转矩电流进行前馈补偿有效降低动态速降,明显改善了传动系统动态性能。
∶
[1]李崇坚.交流同步电机调速系统[M].北京∶科学出版社,2012∶1-2.
[2]吴轩钦.电励磁同步电机双三电平矢量控制系统研究及其应用[D].徐州∶中国矿业大学信电学院,2007∶1-2.
[3]HUJun,WUBin.Newintegrationalgorithmsforestimatingmotor fluxoverawidespeedrange[J].IEEETransactionsonPowerE-lectronics,1998,13(5)∶969-977.
[4]马小亮,魏学森.数字矢量控制和直接力矩控制调速系统中的电压模型[J].电工技术学报,2004,19(3)∶66-69. MAXiaoliang,WEIXuesen.Voltagemodelofdigitalvectorcontrolanddirecttorquecontrolsystems[J].TransactionsofChina ElectrotechnicalSociety,2004,19(3)∶66-69.
[5]付凤超,戴鹏,周二磊,等.电励磁同步电动机磁链观测模型[J].电气传动,2010,40(8)∶24-27. FUFengchao,DAIPeng,ZHOUErlei,etal.Fluxestimatedmodelofelectricalexcitationsynchronousmotor[J].ElectricDrive,2010,40(8)∶24-27.
[6]赵新,金新民,李葛亮,等.直驱型电励磁同步发电机新型磁链观测技术[J].电工技术学报,2013,28(10)∶75-82. ZHAOXin,JINXinmin,LIGeliang,etal.Newfluxobserverofdirect-driveelectricallyexcitedsynchronousgenerators[J].TransactionsofChinaElectrotechnicalSociety,2013,28(10)∶75-82.
[7]谭国俊,吴轩钦,李浩,等.Back-to-Back双三电平电励磁同步电机矢量控制系统[J].电工技术学报,2011,26(3)∶24-29. TANGuojun,WUQinxuan,LIHao,etal.Vectorcontrolsystemof electricallyexcitedsynchronousmotorfedbyback-to-backdual three-levelconverter[J].TransactionsofChinaElectrotechnical Society,2011,26(3)∶24-29.
[8]张晓光,孙力,赵克.基于负载转矩滑模观测的永磁同步电机滑模控制[J].中国电机工程学报,2012,32(3)∶111-116. ZHANGXiaoguang,SUNLi,ZHAOKe.Slidingmodecontrolof PMSMbasedonanovelloadtorqueslidingmodeobserver[J]. ProceedingsoftheCSEE,2012,32(3)∶111-116.
[9]王志宇,王长松,齐昕,等.永磁同步电机自适应滑模负载观测器研究[J].电机与控制学报,2012,16(1)∶45-49. WANGZhiyu,WANGChangsong,QIXin,etal.StudyonMRAS sliding-modeloadtorqueobserverbasedonPMSM[J].Electric MachinesandControl,2012,16(1)∶45-49.
[10]LAICK,SHYUKK.Anovelmotordrivedesignforincremental motionsystemviasliding-modecontrolmethod[J].IEEETransactionsonIndustrialElectronics,2005,52(2)∶499-507.
[11]郑泽东,李永东,肖曦.永磁同步电机负载转矩观测器[J].电工技术学报,2010,25(2)∶30-36. ZHENGZedong,LIYongdong,XIAOXi.Loadtorqueobserverof permanentmagnetsynchronousmotor[J].TransactionsofChina ElectrotechnicalSociety,2010,25(2)∶30-36.
[12]高扬,杨明,于泳,等.基于扰动观测器的PMSM交流伺服系统低速控制[J].中国电机工程学报,2005,25(22)∶125 -129. GAOYang,YANGMing,YUYong,etal.Disturbanceobserver basedlowspeedcontrolofPMSMservosystem[J].Proceedings oftheCSEE,2005,25(22)∶125-129.
[13]刘颖,周波,方斯深.基于新型扰动观测器的永磁同步电机滑模控制[J].中国电机工程学报,2010,30(9)∶80-85. LIUYing,ZHOUBo,FANGSichen.Slidingmodecontrolof PMSMbasedonanoveldisturbanceobserver[J].Proceedingsof theCSEE,2010,30(9)∶80-85.
[14]赵弘,李擎,李华德,等.负荷观测器在抑制轧钢扰动中的应用[J].电气传动,2006,36(5)∶16-18. ZHAOHong,LIQing,LIHuade,etal.Applicationofloadobservercontroldisturbanceofrolling[J].ElectricDrive,2006,36(5)∶16-18.
[15]彭勇刚.模糊控制工程应用若干问题研究[D].杭州∶浙江大学电气工程学院,2008∶24-46.
(编辑∶张诗阁)
Statorfluxorientedvectorcontrolofexcitedsynchronousmotor basedonloadtorqueobserverfeed-forwardcontrol
SHANGJing1,2,NIANXiao-hong1,LIUKe-an2,NANYong-hui2
(1.SchoolofInformationScienceandEngineering,CentralSouthUniversity,Changsha410004,China;2.CSRZhuzhouElectricLocomotiveResearchInstituteCo.,Ltd.,Zhuzhou412001,China)
∶Thestatorfluxorientedvectorcontrolstrategywasstudiedforelectricallyexcitedsynchronous motortosatisfythehighperformanceofrollingmillmaindrive.Amixedstatorfluxobserverwasusedto satisfythefullspeedrange.Themixobserverincludesacurrent-modelwhichisusedatlowspeedanda novelvoltage-modelwhichisusedathighspeedbasedonspeedcompensated.Toimprovethespeeddynamiticperformance,theloworderloadobserverforfeed-forwardtorquecurrentcontrolwasproposedin whichfuzzyadaptivecontrolwasadopted.Simulationandexperimentresultsdemonstratethestrategyis effective.
∶electricallyexcitedsynchronousmotor;statorflux;loadtorqueobserver;fuzzycontrol;vector control
∶TM341
∶A
∶1007-449X(2015)11-0025-07
∶2014-10-10
∶国家科技支撑计划(2012BAF090B2);国家自然科学基金(61075065)
∶尚 敬(1977—),男,博士研究生,高级工程师,研究方向为大功率交流电机传动控制;
年晓红(1965—),男,教授,博士生导师,研究方向为交流技术与传动控制、复杂多体系统控制和优化;
刘可安(1971—),男,教授级高级工程师,研究方向为大功率交流传动控制;
南永辉(1979—),男,高级工程师,研究方向为交流电机调速控制。
∶尚 敬
DOI∶10.15938/j.emc.2015.11.004
猜你喜欢
防爆电机(2020年6期)2020-12-14
防爆电机(2020年4期)2020-12-14
光学精密工程(2016年3期)2016-11-07
电测与仪表(2016年10期)2016-04-12
铁道科学与工程学报(2015年5期)2015-12-24
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电测与仪表(2015年19期)2015-04-09
大电机技术(2015年5期)2015-02-27
电测与仪表(2014年17期)2014-04-04
电测与仪表(2014年11期)2014-04-04