
车联网研究现状及发展
2015-01-02 12:11奎丽萍罗桂兰
中国科技信息 2015年4期
奎丽萍 罗桂兰
车联网作为智能交通的重要基础,是构建未来智慧城市的重要组成部分,是目前无线通信网络研究的一个热点。本文分别介绍了车联网的研究背景、基本概念、体系结构及特点,对其物理层和MAC 层作了简要介绍,重点分析了路由层的相关协议。此外,还阐述了将网络仿真软件ns-3 与VanetMobiSim 结合的过程,将其作为研究车联网的仿真平台。最后,对车联网的研究现状和进展做了总结与展望。
据官方统计,中国每年交通事故50 万起,因交通事故死亡人数均超过10 万人,稳居世界第一,且带来了巨大的经济损失。发展智能交通的目的就是要从根本上改善目前的交通状况,确保我国道路的交通安全。车联网(Internet of Vehicles,IoV)是智能交通系统(Intelligent Transportation System,ITS)的重要基础。车联网中的车辆集成了信息和通信技术,可以提供车与车之间的通信,及时将道路上的交通信息传递给其他车辆,从而为正在道路上行驶的汽车提供安全和舒适的交通环境。车联网作为我国“十二五”规划重点项目,政府给予了重点支持,为未来的交通运输等领域的发展奠定坚实的技术基础。近几年,车联网关键技术的相关项目也成为不少高校和科研机构的研究热点,并取得了许多有价值的研究成果。
车联网定义、结构和特点
定义
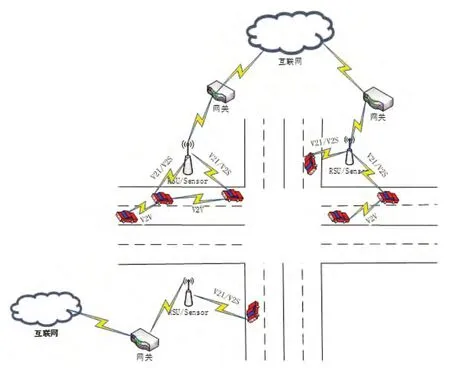
图1 车联网网络架构图
车联网的定义有多种,但它们共有的特性是车辆安装有GPS、RFID、传感器等装置,通过互联网、计算机和通信等技术将行驶车辆以及车辆与路边基础设施结合成一个车辆通信网络,在车辆间及时传递交通信息,实现交通管控的智能化。车联网的通信方式有多种,包括车辆与车辆(V2V)、车辆与基础设施(V2I)、车辆与传感器(V2S)以及车辆与电网(V2G)等通信。
网络架构
车联网网络架构如图1 所示,主要由车辆和路边单元构成,包括V2V 通信和车辆与路边单元(V2R)通信,车联网中的车辆会安装有车载单元(OBU)和全球定位系统(GPS)。GPS 用于定位车辆的位置,以及跟踪车辆的速度和方向。OBU 是无线通信设备,可将道路上安装有该设备的车辆变成无线网络节点,以实现网络通信。
主要特点
车联网有自身的一些特点,主要包括:
1)网络拓扑变化快:车辆运行速度快,网络拓扑易被打乱;
2)移动模型较稳定:车辆只会沿着道路的车道行驶,具有一定的规律性;
3)能源充足:车辆发动机会提供充足的电力;
4)生命时间长:车联网节点生命取决于车辆本身;
5)传输带宽较大:车联网通信传输带宽为几十Mbit/s;
6)无线信道不稳定:车辆通信会受车辆相对速度、路边建筑和道路情况等影响。
车联网协议标准
DSRC
专用短程通信(DSRC)作为一种应用在短距离上高效的无线通信技术,它可以在小范围内将图像、语音等数据信息进行实时、准确和可靠地传输,车辆和道路也可以被有机地连接。
IEEE802.11P
IEEE 802.11p 协议主要用于车载电子无线通信,解决车联网中快速连接、高频率切换和新的安全等问题。在物理层上,IEEE802.11p 是基于正交频分复用(OFDM)技术,可以提高抗干扰性能。
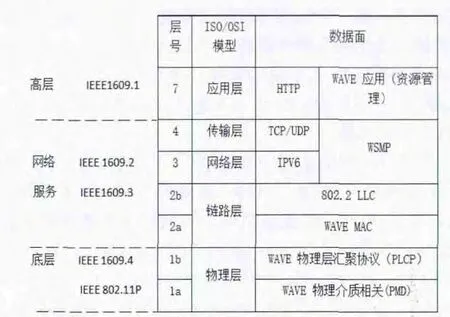
图2 IEEE 1609 与IEEE802.11P 的关系图
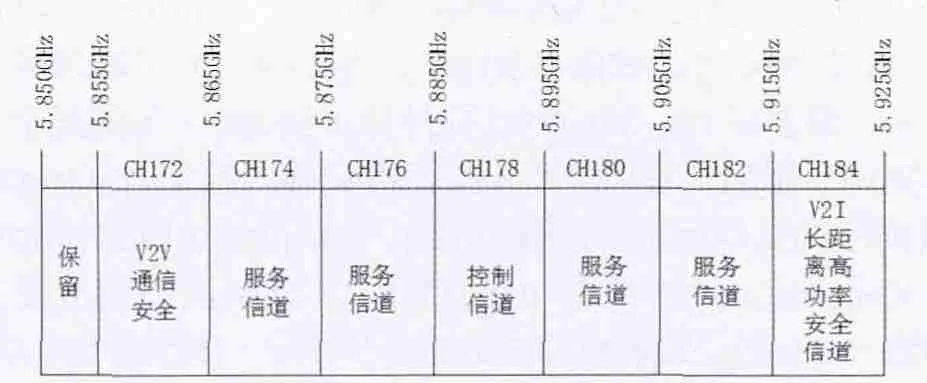
图3 IEEE802.11P 物理层频谱分配图
IEEE1609
IEEE1609 是IEEE802.11P 的补充,二者的关系如图2 所示。IEEE1609.1 标准用于车载环境中的资源管理,为采用DSRC 技术通信的设备提供管理机制;IEEE1609.2 标准用于应用和管理信息的安全服务;IEEE1609.3 标准提供WAVE/DSRC 的网络通信服务,即提供V2V 和V2I 之间的通信;IEEE1609.4 是多信道操作标准,提供信道协调及MAC 子层管理功能。
车联网关键技术
物理层
在物理层,车联网采用IEEE 802.1lp 标准,其工作频率为5.850~5.925GHz,频谱分配如图3 所示。由于在IoV 通信中存在多径传播、多普勒效应,为了提高通信质量,IEEE 802.1lp 使用64 点OFDM 技术,其传输范围是300m~1km,信息传输速率为3~27Mbit/s。
MAC 层
与传统自组织网络相比,IoV 的MAC 层有很多自身的特点,如:信道质量不稳定,易受交通状况影响,网络拓扑变化快,链路稳定性差等。因此,车联网的MAC 层在高速移动状况下应具备较好的通信实时性和可靠性。此外,还要有较高的带宽利用率,以避免网络拥塞。
路由层
车联网的路由协议有部分是源于传统Ad hoc 网络,但是由于IoV 具有独特性,这部分协议并不具有很好的适应性。目前IoV 的路由协议已有多种形式,其路由协议关系如图4 所示。
单播路由
基于网络拓扑的路由
按需路由和表驱动路由是极为重要的两种基于网络拓扑的路由以协议,其中典型的按需路由有AODV、DSR等。由于车联网规模庞大、拓扑变化较快,要实时地维护其网络拓扑信息是很困难的,路由表很容易失效。这使得AODV 和DSR 不能有效地适用于车联网中,尤其在远距离的通信时,丢包等问题更严重。
基于地理位置路由协议
2000 年,美国哈佛大学的两位学者Brad Karp 和H.T.Kung 提出了贪婪周边无状态路由协议(GPSR)。在车联网中,完全采用GPSR 容易出现局部最优问题,车联网环境复杂,尤其是在城市环境中。因此,在车联网中,许多基于地理位置路由协议会对GPSR进行改进,如:GPCR协议、GPSR-DTN路由算法、DTN路由协议等。
基于地图的路由协议
较早的基于地图路由算法有A-star 路由算法和Dijkstra 算法,A-star 路由算法是建立在交通流量统计基础上的,但就目前的技术条件来讲要提供与真实交通状况完全一致的数据仍有一定的难度。Louvre 协议提出了节点自主统计车辆密度,周期性广播以与周围节点交换密度信息。为了实现对车辆密度的实时准确的统计,且减少额外的带宽消耗,AGLOR 算法设计在路边均匀铺设AP 来统计车辆密度 。
广播路由
基于概率的广播路由
基于概率的广播路由中,车辆节点是以p 概率进行转发操作,但该算法存在不足,如不能均匀的对目标区域进行全覆盖,且当车辆节点密度较低时,可能出现所有节点都不转发的情况。N.Wisitpongphan 提出了一种加权式p-坚持方法,实验结果表明:这种转发概率机制可以很大程度地降低数据冗余度和丢包率。
基于地理位置的广播路由
随着汽车电子工业的发展,汽车上都配置了GPS 导航系统,车辆的地理位置信息就很容易获取。把基于地理位置算法与GPSR 算法相结合,这种结合算法假设每辆车都安装了GPS,并能准确定位车辆位置。实验表明:该方法能减少数据包的丢失率,提高数据包到达率。
基于车辆到基础设施的路由协议
V2V 路由协议虽然可以在一定程度上提高性能,但是会因为车辆的高度移动性而遭遇网络分割的问题。当前的研究趋向于将V2V 和V2I 合并起来以获得预期的效果,其方案就是在沿着道路布设接入点以使通信变得更加可靠并减少传递延迟。
静态基础设施路由协议
基于顶点预测贪婪路由(VPGR)协议是一种适用于城市的多跳V2R 路由协议,它估计从源车辆节点到固定基础设施的一个序列连接,然后将消息沿着这些连接传递给固定的基础实施。提出基础设施辅助地理路由(IAGR),通过利用可靠的RSU 连接性,这种路由可以提高多跳地理路由协议的操作性、可靠性。
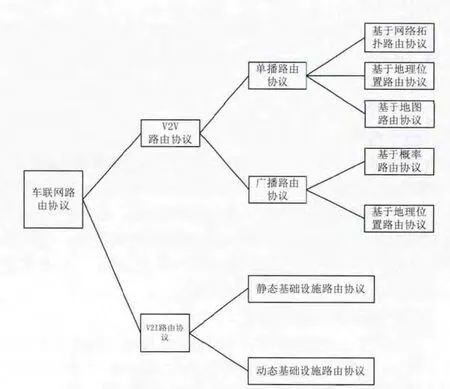
图4 车联网路由协议关系图

图5 ns3 编译成功结果图
移动基础设施路由协议
基于移动基础设施车辆自组网路由(MIBR)是一种基于位置反应式路由协议,该协议规定,在公共汽车分布较密集的道路区域,会由公共汽车将数据包从一个十字路口转发到另一个十字路口,而在车辆稀疏的道路区域,会由公共汽车和汽车共同协作执行数据包转发。类似的协议还有移动网关路由协议(MGRP),它旨在提高数据包到达率,减少平均跳数。
总的说来,相比于其他路由协议,基于位置的路由协议更适用于车联网环境。而基于基础设施的路由协议是车联网路由技术中最有前景的研究领域。
搭建VanetMobisim 与ns-3 实验仿真平台
VanetMobisim 是一种能提供真实交通流信息的车联网仿真工具,它采用不同的宏移动、微移动模型以及二者联合使用的车辆移动跟踪Trace 文件。其中Trace文件可以直接导入不同的网络仿真软件,如ns-2、QualNet 和GloMoSim 等,下面描述如何将二者结合以用于车联网仿真。
将由VanetMobiSim 中的IDM_LC.xml 文件生成的trace 文件导入到ns-3 中。首先将IDM_LC.xml 重命名变为IDM_LC.txt 文本文件,接着对该文本文件中的扩展类注释语句<!--extension class=”de.uni_stuttgart .informatik.canu.mobisim.extensions。NS Output”output=”ns_ trace.txt”/-->去注释化,修改后,再重命名成IDM_LC.xml 文件。此时对IDM_LC.xml运行就可以生成能到导入到ns-3的trace文件,trace 文件会自动被保存到jar 文件夹中。为了能够成功导入,需要将ns_trace.txt 文件拷贝到ns-3 的某个文件夹内。最后,在ns-3 的脚本文件内给出ns_trace.txt所在的文件目录,代码是std::string traceFile=“src/mobility/examples/ns_trace.txt”,这条语句要放在主函数main 内。如果编译结果如图5 所示,表示结合成功。
总结与展望
随着信息通信和电子技术的快速发展,车辆日趋于网络化、智能化。本文主要介绍了车联网的路由协议,对如何将ns-3 于与VanetMobiSim 结合进行了描述。目前已经提出了较多的车联网路由层协议,但这些协议离实际应用还存在很大的差距,对路由协议开展更深入的研究是必然趋势。作为构建智慧城市重要基础的车联网,已经得到西方发达国家高度重视,我们国家也开始注意到发展车联网对促进我国智慧城市及国民经济发展的重要意义。基于传统理论与技术而设计的方案,不能有效地解决车联网中的关键问题。因此,要根据车联网的特性,探索研究更加有效的方法来实现车联网的实际应用。
猜你喜欢
网络安全与数据管理(2022年2期)2022-05-23
党的生活(黑龙江)(2022年4期)2022-04-25
现代电子技术(2022年8期)2022-04-13
现代电子技术(2022年4期)2022-02-21
铁道通信信号(2020年9期)2020-02-06
太原学院学报(自然科学版)(2019年3期)2019-09-23
太原科技大学学报(2019年3期)2019-08-05
电子制作(2018年23期)2018-12-26
科技与创新(2018年1期)2018-12-23
通信世界(2018年27期)2018-10-16
