
车辆行车实时目标区域特征提取及分类训练*
2015-01-01 03:12王长元
西安工业大学学报 2015年11期
王 全 ,王长元 ,穆 静,荆 心
(西安工业大学 计算机科学与工程学院,西安710021)
车辆检测作为智能车辆环境感知系统核心技术,可以有效降低车辆追尾等碰撞造成的财产损失,提高人身安全.城市交通环境中,车辆检测的实时性和鲁棒性不能满足实际应用要求,主要原因是车辆目标类型、尺寸、颜色和环境背景等非确定性因素众多.针对这一情况,本文对前视车辆检测方法进行研究,本文对前视车辆检测方法进行研究.目前,车辆检测的各种方法中,基于机器学习的方法是研究的热点[1].基于机器学习的方法主要包括有效的特征提取和分类器设计两个关键环节。目前特征提取主要提取的特征包括:Gabor特征[2],Haar小波特征[3-4],Haar-Like特征[5],梯度方向直方图(Histogram of Oriented Gradient,HOG)特征[6],尺度不变特征转换 (Scale-invariant Feature Transform,SIFT)特征[7],边缘方向直方图[8]等.分类器的学习方法主要有:支持向量机(Support Vector Machine,SVM)[9]、人工神经网络[10]、Adaboost加强学习算法[11]、决策树分类匹配[12]等.
文献[13-14]提出利用Haar特征和Adaboost算法相结合的方法进行前方车辆检测,当前向车辆距离较远时,容易产生误识别;另外,当图像或视频的背景环境中出现建筑物、云彩、花卉等繁杂物体时,分类器会产生一定的误识别.文献[15]采用基于SIFT的车辆检测算法,该方法对大小和旋转变化有较好的适用性,主要应用在具有明显特征的图像中;HOG特征结合SVM的方法可应用于不同的场景中,但算法的不足是需要大量的运算[16].
本文针对智能车辆视觉导航存在的实际问题,提出一种基于HOG特征和SVM的前方车辆检测方法.采用一种改进的Hough变换直线检测提取图像目标区域,避免对整幅图像进行检测,减小运算量,提升智能车辆前方图像中车辆检测的实时性和鲁棒性.
1 目标区域的提取
智能车辆在行驶过程中,只有当前车道以及左右车道中的车辆对其构成影响,除此之外其他位置的车辆并不关心;为了实现对车辆的高效鲁棒检测,尽可能地减少道路两旁的各种干扰,如车辆、建筑物、树木和护栏等,所以,本文采用一种改进的Hough变换直线检测的方法首先检测智能车辆所在当前车道以及左右车道区域确定目标检测区域,并将后续车辆检测范围约束在该区域范围内.以此提高车辆检测的实时性和鲁棒性.
标准的Hough变换投票空间其极角θ的取值范围是(0,π),极径ρ的取值范围为(0,r),r为图像空间的对角线长度;所以对于车辆检测来说,过大的搜索范围会得到过多的无用信息。因而对ρ和θ的取值做出限定,得到Hough变换目标点的约束区域为

式中:θ1和ρl为智能车辆本身所在车道的左车道线的极角和极径;θr和ρr为右车道线的极角和极径.Hough变换极角约束区域如图1所示,图像的横向坐标用u表示,图像的纵向坐标用v表示,图像的左上角作为图像空间的原点.

图1 建立极角约束区域Fig.1 The establishment of constraint regions of polar angle
在建立了极角约束区域后,左右车道线范围以外的区域将不在Hough变换目标点的搜索范围之内,在滤去大量干扰信息的同时也使得算法的实时性得以改善.
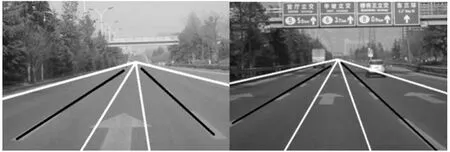
图2 采用改进Hough变换的感兴趣区域提取结果Fig.2 The results of region of interest detection using an improved Hough transform
在实验中调用计算机视觉库Opencv提供的函数cvHoughLines2在二值图像中拟合直线;设置合理的参数可以很好的提取目标区域;图2为在不同的路况下采用了基于极角约束的Hough变换的直线车道检测结果,黑色直线表示拟合的车辆所在车道线,白色直线表示Hough变换的投票范围,外侧白色直线即为提取的图像感兴趣区域,车辆的检测范围将约束在此范围内,算法的计算量减少.
2 HOG特征的提取
Dalal等人2005年首先提出梯度方向直方图和支持向量机相结合的方法进行行人检测.此后,在目标检测领域基于梯度方向直方图特征结合支持向量机的检测算法得到广泛的应用.梯度方向直方图是对检测目标外形光强梯度或边缘方向的描述符,特征是通过计算局部区域的梯度方向直方图来构成的.Hog特征提取步骤:①对输入彩色图像的子窗口进行灰度化处理;②采用Gamma校正法对图像进行标准化处理,减少阴影和光照因素的影响;③获取轮廓信息,同时进一步弱化光照的干扰,计算图像每个像素梯度的大小和方向;④将图像分成很多个小的单元格,梯度方向从0°~180°量化到几个区域上,单元格中的所有像素的梯度直方图进行累加,形成每个单元格的梯度方向直方图特征,为局部图像区域提供一个编码,保留图像中目标外观和形状信息;⑤对单元格进行归一化,将归一化后的块描述符就称之为Hog描述符;⑥计算完子窗口中所有块的Hog特征并串联起来,就得到了检测目标Hog特征向量,该特征向量供分类使用.本文采用的检测窗口大小为64*64像素,块大小为16*16像素,滑动增量大小为8*8像素,胞元大小为8*8像素,把梯度方向0°~180°分为9个梯度方向,每个梯度方向的范围为20°,即每个块包含4个胞元,每个胞元中统计9个方向的梯度直方图,检测的Block数量为49个,那么检测窗口的HOG特征描述为一个1 764维的向量.
与其他特征相比,HOG特征对图像几何和光学形变都能保持很好的不变性,这是因为操作是在图像的局部方格上,只有在更大的空间区域上才会出现几何和光学的形变.在粗的空域抽样、精细的方向抽样以及较强的局部光学归一化等条件下,光照、平移和旋转等带来的影响得到有效抑制.
3 SVM车辆分类器的训练
支持向量机是一种新型的机器学习方法,是以Vapnik-Chervonenkis维理论结构风险最小化原则为基础的;车辆监测属于二分类问题,为实现两类或多类的分类问题,将输入向量映射到高维特征空间,在这个空间中构造最优分类器;由于其良好的分类性能,支持向量机目前在车辆、行人监测等分类器的设计中被广泛应用.本文结合HOG特征和检测速度的要求选用线性的SVM训练分类器。文中选取的训练样本是从道路图像中人工筛选出的定位精度高、清晰度高的4 000多张图片,其中正样本1 820张,负样本2 810张.基于SVM的车辆分类器训练步骤:①提取所有正样本和负样本的梯度方向直方图特征;②使用SVM对提取的HOG特征进行一次训练,生成基本分类器;③使用训练出来的基本分类器对所有不包含车辆图像的负样本进行特征检测,把误认为是正样本的负样本放在一起作为困难样本;④对车辆正样本和负样本以及困难样本进行二次HOG特征提取;⑤使用SVM对二次HOG特征进行二次训练,生成实际应用的分类器.
4 实验结果与分析
本实验是在主频为2.67GHz的Intel Core i5处理器和内存4G的计算机上进行的;开发平台为VS2010+Opencv2.4.0软件。本文针对车辆前方视图建立了测试样本库,所选择的图像中包含的车辆基本上都是针对本车道及相邻车道上车辆的前方视图,背景区域是各种环境条件下的道路图像。测试样本库来源于计算机视觉库CALTECH和PETS2001视频(跟踪和监控性能评估国际专题讨论会提供)以及本文作者拍摄的图像,从中选择了86张不同背景和光照条件下的图像;分别采用对整幅图像的直接检测方法和对感兴趣区域的区域检测方法,检测结果如图3所示.
从图3中可看出,采用HOG特征结合SVM的直接检测方法对整幅图像进行遍历,对道路两侧及空中等非感兴趣区域车辆检测的误检测率较高;采用本文的区域检测方法,先通过Hough变换提取图像的感兴趣区域,有效的避免诸如路旁建筑物、护栏、植被树木和非相邻车道车辆的干扰,降低了误检率,提高了车辆检测的识别率.另外,为了验证所提方法的有效性,将文中的区域检测方法与基于HOG特征和SVM分类器的直接检测算法和基于Haar-Like和AdaBoost分类器检查算法进行对比实验,分别统计得到车辆检测的平均用时和识别率,结果见表1.

图3 两种方法检测结果对比Fig.3 Comparison between the results abtained by two detection methods

表1 不同车辆检测方法检测结果比较Tab.1 Comparison between the results by different detection methods
由表1所示结果可以得出,使用本文提出的区域检测法能够实时、准确的检测前方车辆;与HOG+SVM的直接检测算法比较,车辆检测用时降低了30%,识别率提高了1.6%,取得了较好的效果.
5 结 论
1)针对智能车前方车辆实时检测问题,文中提出了一种基于梯度方向直方图特征和支持向量机的智能车前方车辆的区域检测方法.
2)通过一种改进的Hough变换直线检测方法将智能车辆当前车道的及左右车道确定为感兴趣区域,有效避免了对整幅图像进行检测,计算量得以降低.3)采用SVM算法和HOG特征训练车辆分类器,并对实际图像进行检测.区域检测方法在平均用时和识别率两项指标上优于直接检测方法,具有良好的应用前景.但感兴趣区域边界的定位还不够准确,有待进一步改进.
[1] 蔡益红.多特征融合的道路车辆检测方法[J].计算技术与自动化,2013,32(1):98.CAI Yi-hong.Fusing Multiple Features to Detect Onroad Vehicles[J].Computing Technology and Automation,2013,32(1):98.(in Chinese)
[2] SUN Z,BEBIS G,MILLER R.Monocular Precrash Vehicle Detection:Features and Classifiers[J].IEEE Transactions on Image Processing,2006,15(7):2019.
[3] WANGR C C R,LIEN J J J.Automatic Vehicle Detection Using Local Features-A Statistical Approach[J].IEEE Transactions on International Transportation System,2008,9(1):83.
[4] CHENG G,CHEN X.A Vehicle Detection Approach Based on Multi-features Fusion in the Fisheye Images[C]//2011 3rd International Conference on Computer Research and Development(ICCRD),Shanghai:IEEE Press,2011:1.
[5] CHENG W,HAN D J.A Cascade Classifier Using Adaboost Algorithm and Support Vector Machine for Pedestrian Detection[C]//2011IEEE International Conference on Systems,Man,and Cybernetics(SMC),Anchorage,AK:IEEE Press,2011:1430.
[6] MAO L,XIE M,HUANG Y.Preceding Vehicle Detection Using Histograms of Oriented Gradients[C]//2010International Conference on Communications,Circuits and Systems(ICCCAS),Chengdu:IEEE Press,2010,354.
[7] LOWE D G.Distinctive Image Features from Scaleinvariant Key-points [J].International Journal of Computer Vision,2004,60(2):91.
[8] MIYOSHI T,SHIBATA T.A Hardware-Friendly Object Detection Algorithm Based on Variable-Block-Size Directional-Edge Histograms[C]//World Automation Congress(WAC),Kobe:IEEE Press,2010:1.
[9] NELLO C,JOHN S.An Introduction to Support Vector Machines and Other Kernel-Based Learning Methods[C]//Anon Proceedings of Conference Vision and Pattern Recognition.San Diego,California,USA.2004.New York:IEEE Computer Society Press,2004:335.
[10] 倪志伟,蔡庆生.神经网络专家系统及其数据挖掘技术的探讨[J].系统工程学报,2001,16(1):61.NI Zhi-wei,CAI Qing-sheng.Neural Network Expert System and Its Knowledge Discovery[J].Journal of Systems Engineering,2001,16(1):61.(in Chinese)
[11] 王海川,张立明.一种新的Adaboost快速训练算法[J].复旦学报:自然科学版,2004,43(1):27.WANG Hai-chuan,ZHANG Li-ming.A Novel Fast Training Algorithm for Adaboost[J].Journal of Fudan University:Natural Science Edition,2004,43(1):27.(in Chinese)
[12] 杨明,张载鹏.决策树学习算法ID3的研究[J].微机发展,2002,5(1):6.YANG Ming,ZHANG Zai-peng.Research on Decision Tree Learning Algorithm of ID3[J].Microcomputer Development,2002,5(1):6.(in Chinese)
[13] HAN S,HAN Y,HAHN H.Vehicle Detection Method Using Haar-Like Feature on Real Time System[J].Engineering and Technology,2009,59:455,
[14] SONG G Y,LEE K Y,WOONG L J.Vehicle Detection by Edge Based Candidate Generation and Appearance-Based Classification[C]// Proceedings IEEE Intelligent Vehicles Symposium.Eindhoven:Netherlands,2008:428.
[15] DLAGNEKOW L.Video-Based Car Surveillance:License Plate,Make and Model Recognition[D].San Diego:University of California at San Diego,2005.
[16] 张全发,蒲宝明,李天然,等.基于HOG特征和机器学习的工程车辆检测[J].计算机系统应用,2013(7):104.ZHANG Quan-fa,PU Bao-ming,LI Tian-ran,et al.Vehicles Detection Based on Histograms of Oriented Gradients and Machine Learning[J].Computer Systems & Applications,2013(7):104.(in Chinese)
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
卫星应用(2021年11期)2022-01-19
科学大众(2021年9期)2021-07-16
中国交通信息化(2020年11期)2021-01-14
安徽电子信息职业技术学院学报(2020年5期)2020-11-13
摄影之友(影像视觉)(2018年12期)2019-01-28
电子技术与软件工程(2017年14期)2017-09-08
计算机应用(2017年4期)2017-06-27
初中生世界·八年级(2017年3期)2017-03-24
中国交通信息化(2015年10期)2015-06-06
