地面无人机动平台总体设计和动力性分析
2014-12-31 12:08完颜香丽李守成毕书浩孙成全
机械工程与自动化 2014年2期
完颜香丽,李守成,毕书浩,孙成全
(1.南京理工大学 机械工程学院,江苏 南京 210094;2.75134部队 保障处,广西 崇左 532200)
0 引言
随着科学技术的发展,传统的车辆系统因其带来的交通事故、人力资源的浪费、许多特殊场合(如火场、高辐射、重污染区等)无法操控等缺点,越来越不能满足人类的需求。地面无人机动平台因为可以克服以上缺点,近几年来得到了迅速的发展。目前,地面无人机动平台不但在军事上有着特殊的应用价值,而且在公路交通运输中有着广泛的应用前景[1]。
地面无人机动平台分为移动平台、主控台和通讯系统三部分,移动平台可以实现有人驾驶,也可以在主控台的遥控指挥下运动并支持上装部分完成使命。
1 移动平台的总布置设计
移动平台总布置设计包括主要尺寸参数的确定、主要质量参数的确定、各总成选型以及总布置图设计。
移动平台的主要尺寸如表1所示,其主要质量参数如表2所示。

表1 移动平台主要尺寸参数mm
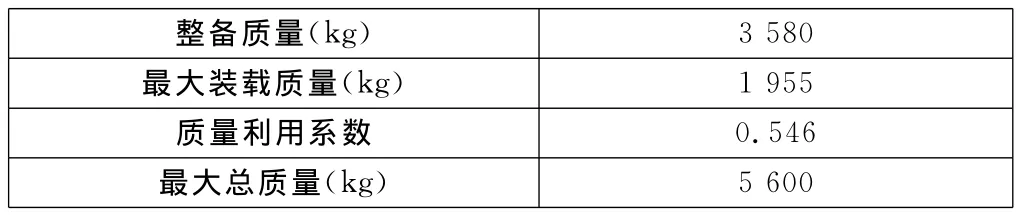
表2 移动平台主要质量参数
各总成选型及其主要参数如下:
(1)发动机型号:SOFIM 8142.43;最大输出功率:83kW;额定功率转速:3 600r/min;最大扭矩:269 N·m;发动机净重:240kg,发动机尺寸:650mm×590mm×780mm。
(2)变速器为南京依维柯2840.6型五档变速箱,各档传动比为6.362,3.482,2.263,1.474,1.000,倒档传动比为5.690。
(3)分动器为六行星轮4706分动器,速比为1,2.69。
(4)主减速器的传动比为5.875。
(5)轮胎为255/70R22.5无内胎越野子午线轮胎,静力半径为460mm,滚动半径为430mm。
(6)GPS定位模块选用NE-85GPS模块,电子罗盘采用DCM220二维电子罗盘,惯性测量单元采用NV-IMU200,图像采集单元采用海康DS-2CD863PFE摄像机。
绘制总布置草图是移动平台总体设计和总布置的重要内容,根据移动平台性能要求和各总成的初步选型绘制移动平台总布置示意图,如图1所示。
2 无人机动平台控制系统设计
地面无人机动平台控制系统的主要设计思想是将网络通信技术、嵌入式技术、GPS卫星定位技术、图像采集处理技术等结合起来,实现对移动平台的监视和控制。移动平台用于承载上装并支持上装完成任务,应包括行驶机构、上装系统、环境感知装置、通信系统等。主控台是指挥员对移动平台进行远程操作的控制平台,用来完成行驶控制、上装控制、信息融合处理、信息显示和通信等功能。主控台和移动平台之间通过以太网进行信息交互。

图1 移动平台总布置草图
2.1 移动平台控制系统设计
移动平台首先应具有感知外界的能力,以监视移动平台的环境,获得移动平台周围的信息并把这些信息通过通信系统传递到主控台供操作员参考;其次,在接收到操作员的指令后,进行基本运动动作,如起步、加速、减速、转向、前进、后退、越障、制动、停车、熄火等;第三,接收到相应操作指令后支持所承载的上装部分完成特定任务;第四,对于收集到的图像信息数据,移动平台要有预处理能力,由此来减少信息传输的压力,增加系统实时性;第五,移动平台应当具有丰富的接口,有可扩展性,可以在需要时添置相应功能的传感器或者外围设备[2]。
移动平台控制系统硬件架构图和流程图如图2、图3所示。

图2 移动平台控制系统硬件架构图
2.2 主控台控制系统设计
主控台即指挥控制中心的操控平台。主控台的主要工作是实时视频监控,显示无人平台网络通信数据,遥控无人平台行进,指挥上装工作等。主控台要综合处理无人平台反馈回来的各种信息,并为指挥员提供良好的人机交互界面。主控台要建立稳定可靠的通信环境,快速准确地与无人平台进行实时通信;要接收操作员的操作,并将操作转换为控制命令,然后通过通讯系统发送给无人平台;接收无人平台命令执行的结果并反馈给指挥员;完成视频图像的解压和显示;要将接收到的无人平台的视频录像等文件导入到主控台,并管理视频文件;主控台还要通过多路视频实时监控无人平台四周,并及时指挥上装工作[3]。图4为主控台硬件架构图,图5为主控台流程图。

图3 移动平台控制流程图
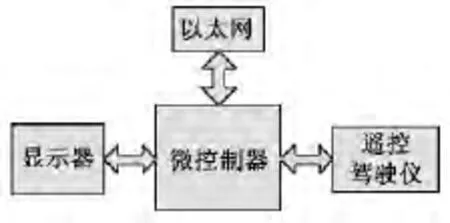
图4 主控台控制系统硬件架构图

图5 主控台控制流程图
3 基于Cruise整车性能分析
根据地面无人移动平台的总布置设计图,利用Cruise软件搭建其模型图,如图6所示。
根据各总成选型,将整车配置组件参数数据依次添加到vehicle data中,同样添加变速箱档位速比参数、后桥主减速比参数、轮胎参数、整车参数等。车辆数据添加完成之后,就可以进行动力性仿真了。图7为各档爬坡性能曲线图,图8为各档加速度图;表3列出了各档最大速度,表4给出了0km/h~100km/h加速时间。
由表3可得,该移动平台最高车速vmax=110km/h;由图7可以得出,最大爬坡度为71.27%;由表4可得,0km/h~100km/h的加速时间为41.76s。
4 总结
目前,地面无人机动平台有很大的市场需求,其涉及到的许多关键技术,如环境感知技术,图像采集、处理及传输等关键技术还有待提高[4]。本文通过移动平台总布置设计及其性能分析可得,所设计的移动平台各性能满足要求,在市场上有较好的应用前景。
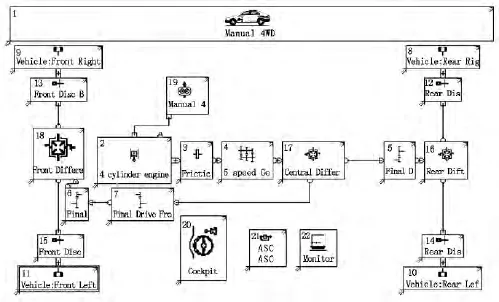
图6 整车模型图

图7 各档爬坡性能曲线图
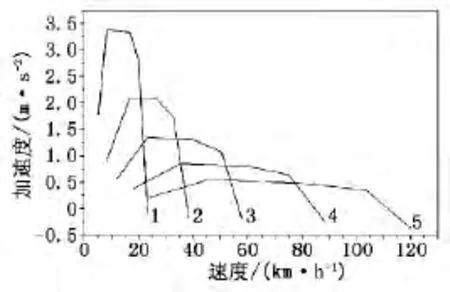
图8 各档加速度图
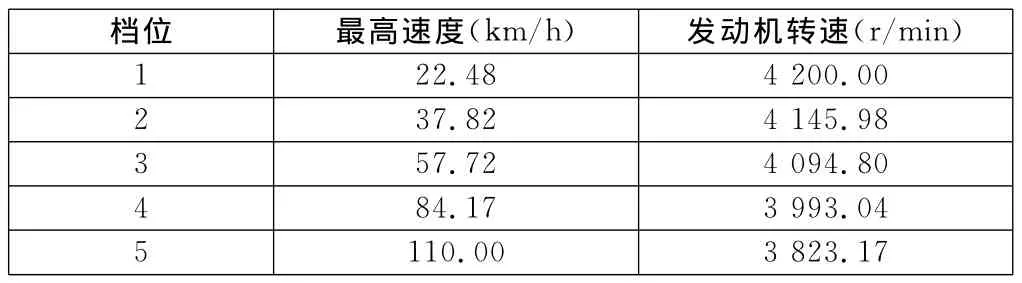
表3 各档最大速度
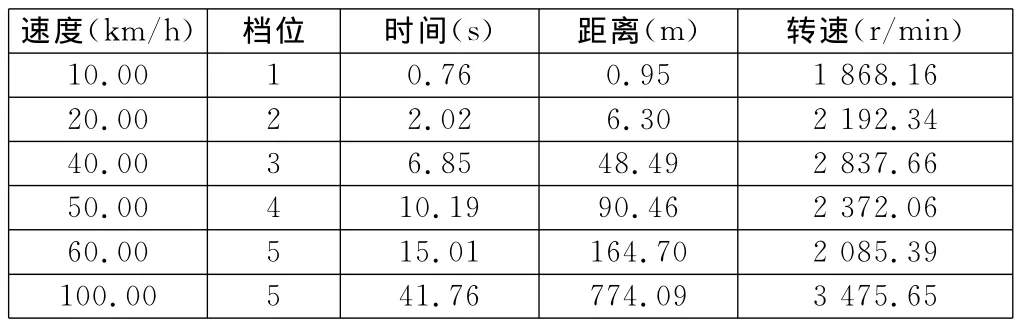
表4 0km/h~100km/h加速时间
[1]曾国栋,张殿富.国内外无人地面武器机动平台发展现状及趋势[J].科技信息,2009(36):38-40.
[2]高峻峣,龚建伟.地面机器人控制系统的研制[J].计算机测量与控制,2003,11(1):36-38.
[3]何忠波,陈慧岩.履带式遥控车辆自动驾驶控制系统的研制[J].工程机械,2003,34(10):3-7.
[4]张敏,刘培志,徐英新,等.地面无人车环境感知关键技术研究[G]//第十五届全国测试与故障诊断技术研讨会论文集.西安:中国计算机自动测量与控制技术协会,2006:316-320.
猜你喜欢
小哥白尼(军事科学)(2019年2期)2019-04-17
小哥白尼·趣味科学画报(2019年12期)2019-02-28
中华手工(2017年2期)2017-06-06
岷峨诗稿(2017年4期)2017-04-20
新高考(英语进阶)(2017年12期)2017-02-26
早期教育(2016年5期)2016-08-23
中外会展(2014年4期)2014-11-27
铁路通信信号工程技术(2014年5期)2014-02-28
铁路通信信号工程技术(2014年2期)2014-02-28
坦克装甲车辆(2000年12期)2000-06-13