轻型电动汽车无刷直流电机驱动系统的研制
2014-12-31 08:22:52黄清锋
中国科技信息 2014年16期
黄清锋
研制了一种运用于轻型电动汽车的无刷直流电机驱动系统,它包括控制单元及电机驱动模块两大部分。相较于传统式电动汽车,本设计将驱动电路、无刷直流电机及电动车轮子整合成一个驱动模块,电动机动力直接驱动电动汽车,而无需传动系统。控制单元是以数字信号处理器(Digital Signal Processor,DSP)为控制基础,并通过控制局域网络总线(Controller Area Network Bus,CAN Bus)接收检测信号及传送指令驱动无刷直流电机,每一模块可根据不同驾驶模式独立运作。通过软件的设定,电机驱动模块可搭配在不同形式的电动汽车上,不需要更改电路设计。
随着能源问题和环境恶化的日益严重,开发一种新型的无油耗、无大气污染、无噪音的交通工具正被世界交通业认为是大势所趋。轻型电动汽车是一种由电力驱动的、无污染的、节能的、新型的交通工具,发展电动汽车是解决燃油汽车所带来的大气环境恶化和能源消耗问题的最有希望的方案之一。
现今,在轻型电动汽车研发的众多技术中,轮毂驱动式电动汽车作为一种新型的电动汽车的选型方向,受到业界的高度关注,相对国内的相关研究来说,目前尚处于刚刚起步阶段,但是由于轮式驱动特有的优点,令其具有广阔的应用前景。电动汽车驱动控制系统是车辆行驶的核心,与传统内燃机汽车相比,电动汽车的电机驱动控制响应速度快、精度高,特别是对于轮式驱动的电动汽车,每个驱动轮的转矩可以独立控制,这样可通过软件实现电动车的行驶功能,其控制装置凸现低成本、高性能的独特优势。本文以此为切入点,进行了轻型电动汽车无刷直流电机驱动系统的研制。
轻型电动车架构与控制策略
轻型电动车基本架构的确定
图1 为传统式电动汽车的整体架构,由图中可看出整个电动车构造复杂,电动机动力通过传动系统传至驱动轮,系统架构不但笨重且能量流失严重,同时使用制动系统来减速或刹车,能量无法回收利用。
图2 为本次设计所提出的轻型电动汽车的整体架构,相较于传统式电动汽车,其架构已大幅简化,将驱动器、电动机、传动系统、制动系统与驱动轮全部整合成电机驱动模块,直接接受控制单元的控制。电动汽车运转时控制电路根据驾驶模式控制无刷直流电机操作于不同象限,可以命令电动车前进或后退。当需要减速或刹车时,无刷直流电机转变成发电机状态,将电动车的动能经由电机驱动模块转换成电能回充于电池。
轮圈式无刷直流电机
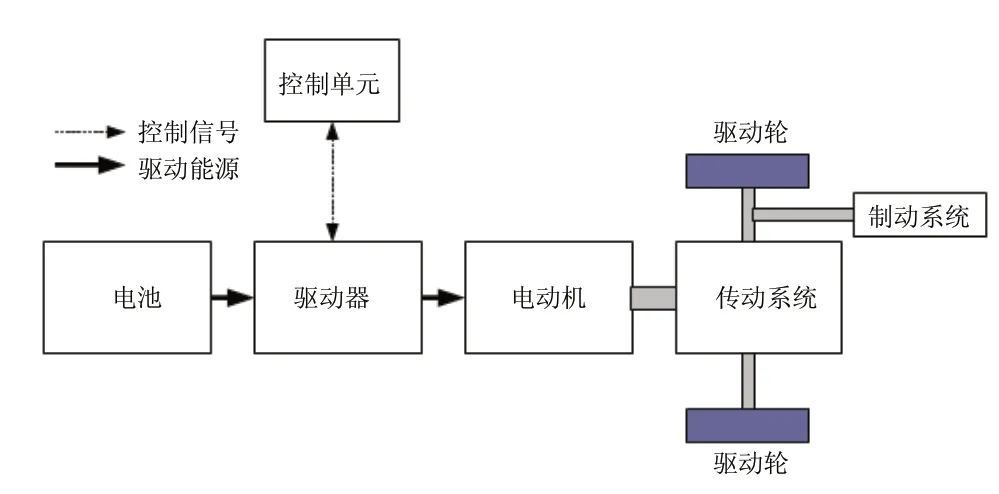
图1 传统式电动车整体架构

图2 轻型电动车整体架构
电机系统是电动汽车运行的心脏,是电动汽车研究需解决的首要问题。针对目前电动汽车常用的电动机进行了比较,得出直流无刷电动机是比较适合于电动车的。它既具有交流电机结构简单、运行可靠、维护方便等一系列优点,又具备直流电机运行效率高、调速性能好的特点,同时无励磁损耗。本系统所使用的无刷直流电机为轮圈式电机,其驱动模块可将电动机动力直接输出,不必通过中间的齿轮、链条或皮带的传输,因此有较高的传动效率。图3 为轮圈式电机结构,可以看出外转子式电机构造,永磁式磁铁镶嵌于转子内侧,固定在外壳上以转轴为圆心转动。定子部分包括硅钢片及定子电枢绕组,固定于无刷直流电机骨架上,整个无刷直流电机转子与定子之间只有通过转轴上的轴承连接,可以将无刷直流电机整体机械损耗降至最低。

图3 轮圈式电机结构
轻型电动汽车驱动系统控制策略
轻型电动车的驾驶模式
电动汽车驾驶模式如图4 所示,包括从静止状态起步加速,固定转速定速行驶及最后阶段的减速或刹车等模式,且电动车行进方向可为前进或后退。电动汽车的驾驶模式除了直线前进外,也包括转向,如图5 所示。由于电动汽车转向时各车轮所走的距离不同,转速各不相同。若无差速器吸收内外侧轮间的转速差,则内侧轮与地面产生的阻力会让电动车转向时的行进轨迹难以有效掌握,所以差速器是车辆传动系统的必要装置。本设计借由控制电路输出不同速度的命令给电动车左右两边的电机驱动模组,所形成的转速差,便具有差速器的效果,不必再依靠机械结构。
轻型电动汽车电机电压控制策略
文献指出,转矩控制策略、功率控制策略及转速控制策略下,驾驶感觉与传统内燃机汽车相异,不适合轻型电动汽车无刷直流电机驱动系统,故本文采用电压控制策略。通常采用线性电流调节系数的电流负反馈控制系统和调压调速系统都属于电压控制策略。
轻型电动汽车直行控制策略
轻型电动车由两个轮圈式电机单独驱动,因取消了机械差速系统,再加上驱动模组内部参数和外部路况等因素,即使两驱动模组的输入信号一致,也不可能绝对保证左右电机转速相同,继而影响电动汽车直行时的稳定性。保证电动汽车能够正常直行的核心是要尽可能地减小直行时的跑偏量,如图6 所示,我们引入一个补偿减小两驱动轮的转速差,补偿的过程是将左电机的速度与右电机的速度比较,将其差值回馈到右电机的速度给定环节,从而减小左右驱动轮的转速差。

图4 电动汽车驾驶模式
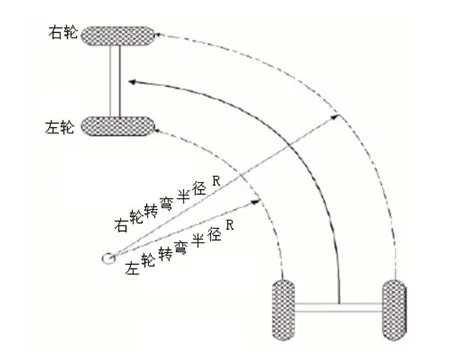
图5 电动汽车的转向
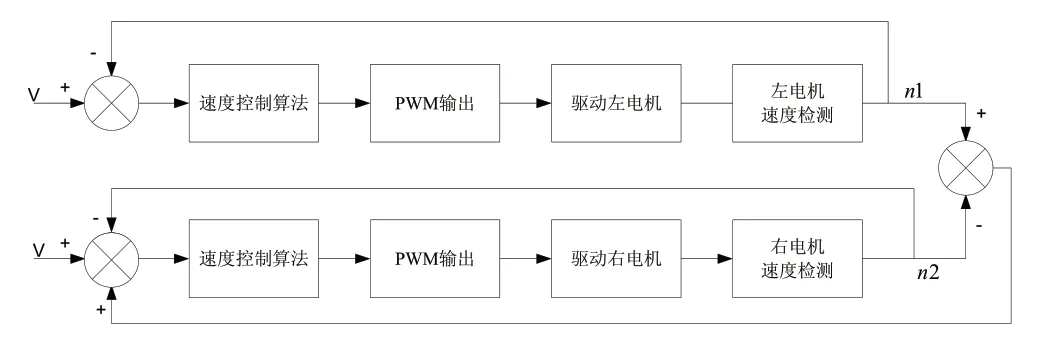
图6 轻型电动车直行控制策略
轻型电动汽车转弯控制策略
轻型电动汽车转向的简化模型如图7 所示,我们分析驱动轮3 和4 的速度可知,v3和 v4是关于车速v 和转向角θ 的变量,改变 v3和 v4,电动车的行进方向会往转速较慢的那边转向。但由于此方式存在一定的安全隐患,同时对驱动轮的要求较高,所以需要对转向转角进行限制。本系统中将转角限制在45°,转角信号超过45°仍然按照45°计算。
轻型电动车调速控制策略

图7 轻型电动汽车转弯简化模型
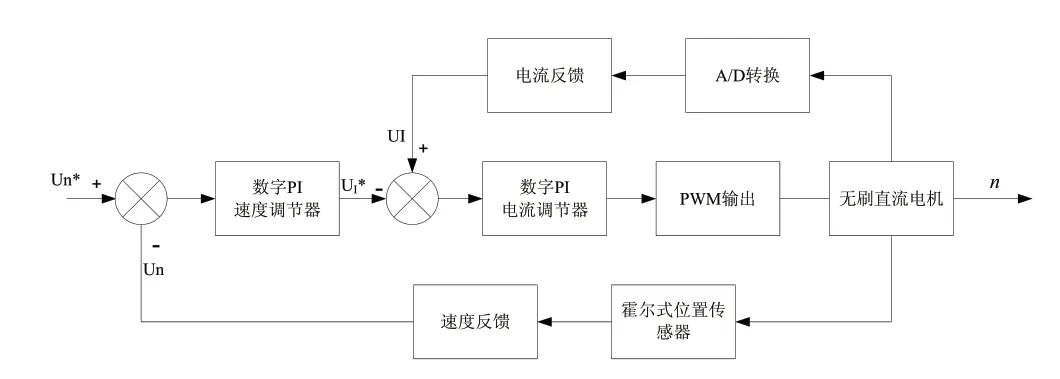
图8 轻型电动车双闭环调速控制策略

图9 轻型电动车无刷直流电机驱动系统硬件总体框图
在工业控制领域中直流无刷电机得到广泛应用,先进的调速控制策略也得到广泛采用,如PID 控制、模糊控制、自适应PID 控制等。由于轻型电动汽车对调速特性的要求并不是很高,故本系统采取转速、电流双闭环控制,它能完全利用无刷直流电机的过载能力,在启动过程中保持电流为允许的最大值,使系统以最大的加速度启动,等转速稳定后,立即让电流降下来,使转矩与负载平衡,使系统进入稳态运行。轻型电动汽车双闭环调速控制策略如图8所示。
通过检测无刷直流电机转子位置信号的变化,我们可以估算出无刷直流电机转速,其目的就是为转速调节计算出电流环的指令值。同时通过检测转子位置信号可以确定定子绕组的导通顺序,从而根据电枢绕组的电流确定定子绕组导通所需的电压平均值,即PWM 的占空比。电流环的作用就是为确定并更新电压平均值即PWM 的占空比。
轻型电动汽车驱动控制系统的设计
硬件设计
轻型电动汽车无刷直流电机驱动系统硬件总体架构如图9 所示,整个驱动系统主要由功率主电路即换流器、驱动电路、转子位置检测、电流检测电路、保护电路、开关输入电路、脚踏板输入电路、CAN 通信电路、电源模块等组成。其中,保护电路包括欠压、过压以及过流保护等;开关输入电路包括钥匙,前进后退转向等信号输入;转子位置检测电路检测无刷直流电动机转子的位置信息,为电动机的准确换相以及速度检测提供依据。
系统的控制单元以DSP TMS320LF2407A 作为控制核心,其特点是利用DSP 强大的数学运算,实现模拟电路所无法完成的控制流程,并充分利用DSP 内建功能如模拟/数字转换器、PWM 产生器、通讯接口等,降低系统的硬件复杂度。
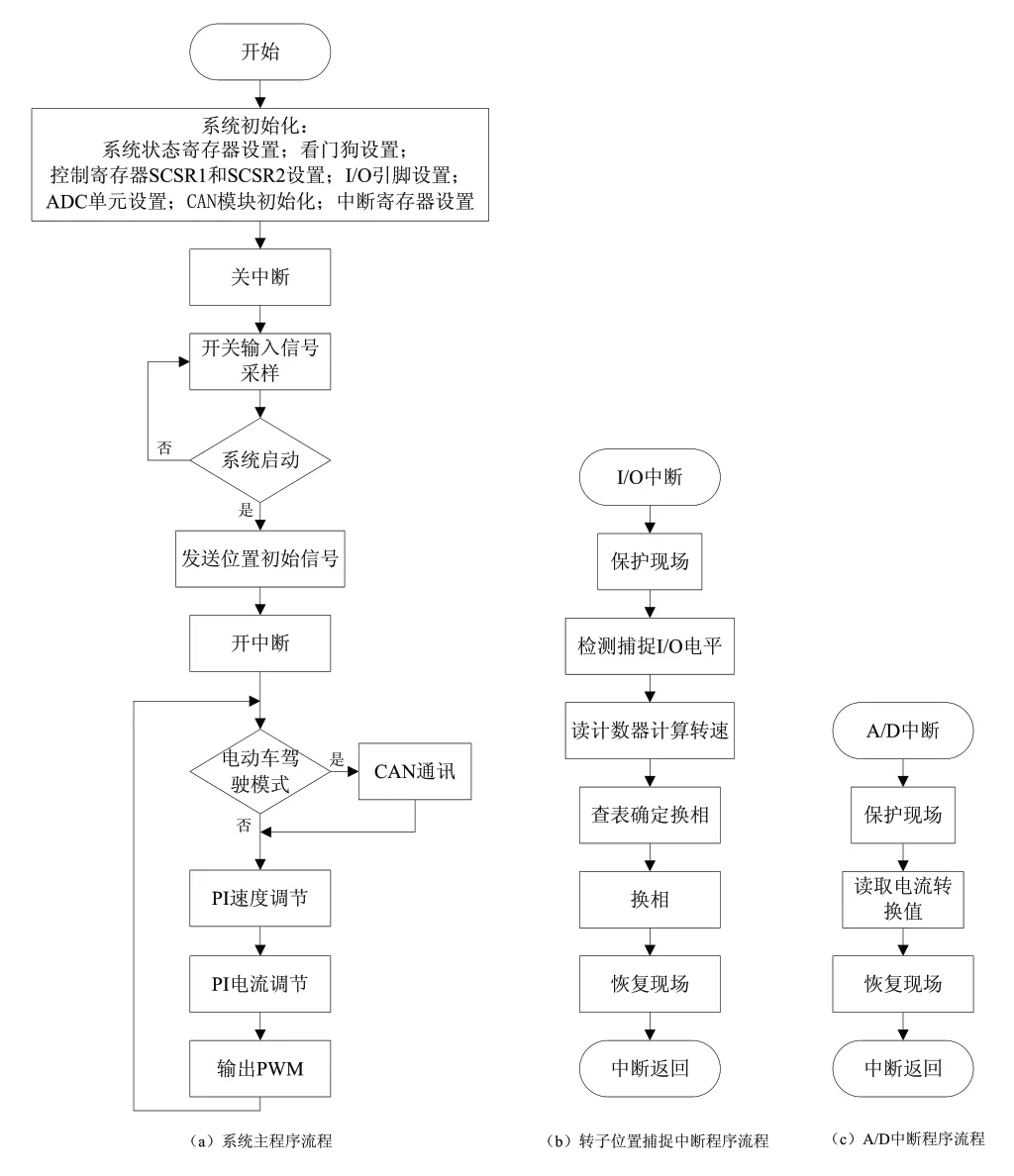
图10 系统程序流程图
控制电路和电机驱动模块以CAN 总线作为命令传送接口。控制电路的方向与速度控制器信号经由CAN 总线传送给远端的电机驱动模块,控制电池与直流无刷电机间的功率流向,速度与电流信号亦经由 CAN 总线传回给控制电路。
软件设计
轻型电动汽车无刷直流电机驱动控制系统能否正常工作,只有硬件系统是不够的,还必须软件的配合才能正常工作。硬件电路满足了驱动电动机运转的基本要求,且提供了硬件保护,软件则使驱动电动机获得优异的调速性能,并且提供了软件保护。
系统程序流程如图10所示,(a)为系统主程序流程,(b)为转子位置捕捉中断程序流程,(c)为A/D 中断程序流程。系统上电时,将进行初始化,之后对外部输入信号进行采样,发现速度信号或方向信号后,系统将按设定的控制策略对直流无刷电动机进行协调控制。DSP 在间隔时间内对外部输入的信号进行采集,实时更新PWM 值,如此循环。转子位置捕捉中断服务子程序的主要作用是根据I/O 脚中断信号捕捉到的转子位置信号进行换相与速度计算。A/D中断服务子程序的主要作用是读取电流转换值,给调解速度环和电流环,实现PWM 参数的更新提供依据。
结语
经实机测量,轻型电动汽车可达到前进、后退、转弯及原地转向等驾驶模式,通过电流限制功能可控制电动机输出转矩,使电动车运转于省电模式;轻型电动汽车具有能量回馈功能,通过无刷直流电机不同象限的控制,刹车时的动能可转为电能回充于电池,测试得到,驱动系统效率最高可达80 %。
猜你喜欢
大电机技术(2022年5期)2022-11-17 08:12:56
消费电子(2022年7期)2022-10-31 06:16:42
能源工程(2020年6期)2021-01-26 00:55:22
21世纪商业评论(2020年12期)2020-01-14 10:44:37
山东冶金(2019年3期)2019-07-10 00:54:04
消费导刊(2018年10期)2018-08-20 02:57:02
大灰狼(2018年3期)2018-06-11 15:28:50
中国公路(2017年5期)2017-06-01 12:10:10
电子制作(2017年1期)2017-05-17 03:54:12
通信电源技术(2016年1期)2016-04-16 04:57:26