
工业机器人在放射源装卸控制系统中的应用
2014-12-24 03:35:04雷绿银李红刚杨海丽
石油管材与仪器 2014年5期
雷绿银 陈 雄 李红刚 刘 君 杨海丽
(川庆钻探工程有限公司测井公司 重庆)
0 引 言
随着石油测井技术的快速发展,放射性物质由于其特殊性质已经被广泛的应用到油气田的勘探和开发,医疗器械和军事武器等方面。放射源(钴-60、铱-192、铯-137、碘-131 等)在衰变过程中会产生具有一定能量的辐射线,它可以破坏人体的正常组织和细胞,引起细胞染色体的畸变和基因突变,对人体健康造成危害。放射源对人体的危害与受辐射线的剂量有关,一次剂量在50 德拉以下的辐射线对人体造成永久性伤害的可能性极小,但是超剂量辐射会导致人体产生呕吐、恶心、腹泻、贫血等机体受损症状,情况严重时可能导致死亡。因此测井探针放射源人工装卸过载过程中测井人员都有可佩戴的防辐射器具和隔离防护的保护措施,但是仍然不能从根本上解决辐射线对测井人员身体有害的问题[1]。
工业机器人是一种面向工业领域的靠自身动力和控制能力来完成一些重复性和危险性工作的机器装置。为了解决测井探针放射源装卸过程中辐射线对测井人员身体的危害和人工装卸效率低的问题,文章中设计了一种基于工业机器人的放射源装卸控制系统。该系统能实现测井探针放射源自动化快速装卸与监控,从根本上解决测井探针放射源装卸过程中辐射线对测井人员身体的伤害,改善了测井作业的工作环境,提高了放射源装卸效率,对测井技术的长远发展具有重要意义[2]。
1 系统的整体架构及工作原理
1.1 系统的整体架构
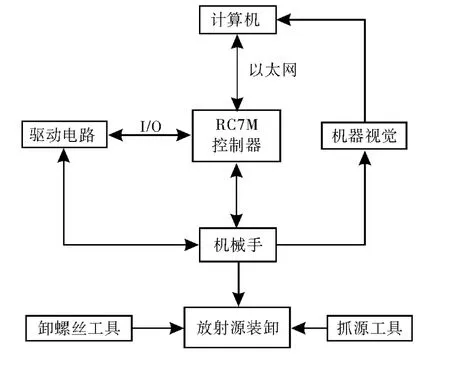
图1 系统的整体架构图
本系统以六自由度工业机器人DENSO 机械手为核心,包括上位机、RC7M 控制器、机器视觉、驱动电路、抓取和卸载工具等几个部分。系统的整体架构图如图1 所示。为了避免放射源装卸过程中产生的辐射线对测井人员身体造成伤害,上位机控制软件与DENSO 机械手之间采用远距离以太网通信技术,操作人员根据机器视觉判断机械手运行状态并控制机械手完成测井探针放射源的装卸过程。RC7M 控制器完成上位机软件控制指令的接收与解析,直接驱动机械手运动,控制器I/O 口的输入输出开关量信号经外部驱动电路控制机械手末端电机的运转和电机运行状态的检测。机械手接收控制器指令后吸合卸载工具打开测井探针容器舱门,换抓取工具抓取放射源放入测井探针容器,最后吸合卸载工具关闭测井探针舱门,完成放射源的装入,反之为放射源的卸载过程。
1.2 系统的工作原理
测井探针放射源装卸控制系统是基于机器视觉的上位机软件控制半自动装卸方案,整个放射源装卸过程包括抓取工具、抓取放射源、装卸放射源、替换工具和机械手复位等几个步骤。机械手装卸放射源工作原理图如图2 所示。放射源装入流程是机械手末端吸合开关舱工具,打开测井探针容器舱门,替换抓取工具后抓取放射源放入测井探针容器,最后机械手末端吸合开关舱工具关闭测井探针舱门,完成测井探针放射源的装入过程。放射源卸载流程与放射源装载流程相反,机械手末端吸合开关舱工具,打开测井探针容器舱门,替换抓取工具后从测井探针容器取出放射源并存入专用放射源存储容器,最后吸合机械手末端吸合开关舱工具关闭测井探针舱门,完成测井探针放射源的取出过程。

图2 放射源装卸工作原理图
2 系统的通信
ORIN 是一种独立于设备层、网络层和应用程序的开放式标准数据交换接口,包括标准程序接口CAO、标准网络协议CAP 和标准数据模式CRD 三个部分。ORIN 将相互独立的应用层和设备层抽象化,提供一个标准的数据交换接口给应用层和设备层,应用层操作的实际对象是经ORIN 抽象化后的虚拟设备层。系统的通信连接图如图3 所示。NetwoRC 协议完成了上位机软件和RC7M 控制器之间通信数据的接口定义与数据包的封装,上位机与RC7M 控制器之间数据传输是基于TCP/IP 协议的以太网通信技术。
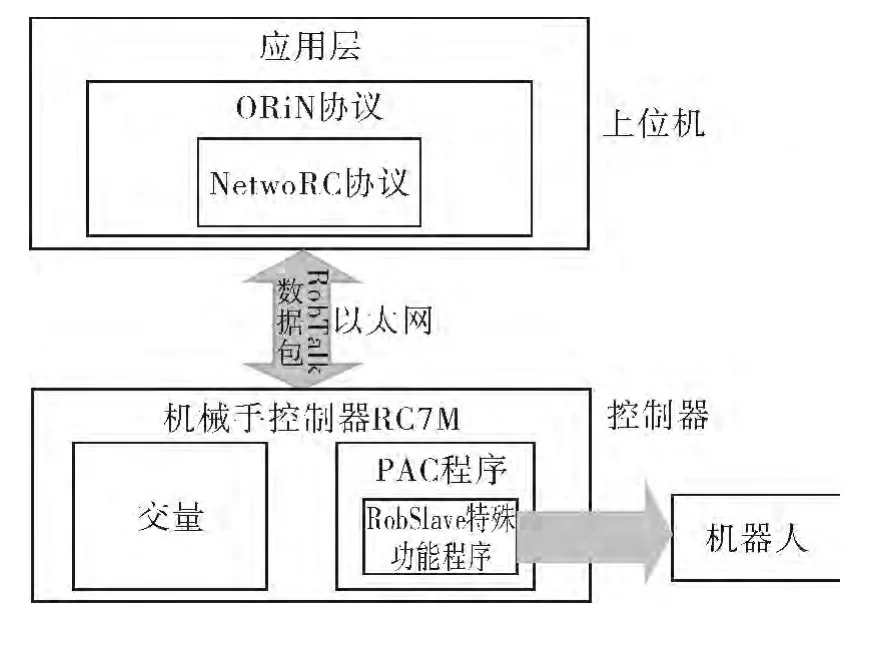
图3 系统的通信连接图
上位机软件调用ORIN 中的CAO 组件对象模型生成NetwoRC 专有通信数据包(RoboTALK),经以太网传输到机械手控制器RC7M,控制器中运行的特殊功能程序RobSlave 完成与上位机的通信握手,上位机软件ORIN 中CAO 组件对象模型完成控制器内的变量访问和机械手初始化。通信连接建立之后,RC7M 控制器置于自动运行模式并运行特殊程序RobSlave,上位机软件发送的控制指令数据包由特殊程序RobSlave 完成控制指令解析,控制器直接驱动机械手运动[3]。
3 系统硬件电路设计
3.1 电机控制电路设计
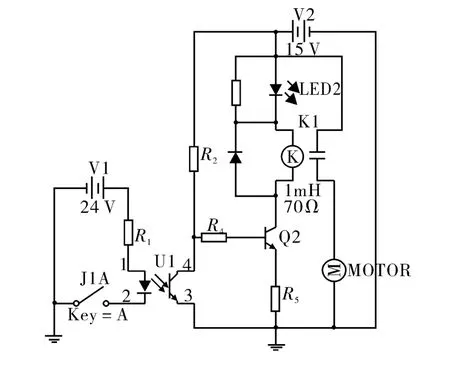
图4 电机控制电路图
RC7M 控制器IO 口输出开关量信号控制机械臂末端电机的运转,但控制器IO 口输出的开关量信号驱动能力有限。文章采用光耦隔离、三极管放大和继电器驱动的方案控制电机运行。电机控制电路图如图4 所示。RC7M 控制器IO 口输出的开关量信号输入光耦二极管负极,光耦的输出通断控制三极管导通与截止,从而驱动继电器控制电机的运转。当控制器IO 口输出高电平时,光耦的输出关断使Q2 基极输入高电平,三极管进入导通放大状态且继电器线圈通电使常开触点吸合,无刷直流电机得电转动。当控制器IO 口输出低电平时,光耦的输出导通使Q2 基极输入低电平,三极管进入截止区域且继电器断电使常开触点断开,无刷直流电机停止转动。继电器两端并联反向二极管在继电器断电瞬间起续流作用,防止感性负载断电瞬间反向电流对电路的冲击[4]。
3.2 电机过载检测电路设计
机械手末端电机运行过程中需要检测电机的运行状态,防止电机出现堵转而损坏。文章采用电压比较器LM311P 和光耦隔离的方案检测电机的堵转状态。电机过载检测电路图如图5 所示。调节可变电阻器R2在电压比较器LM311P 引脚3 输入电机出现堵转的参考电压,无刷直流电机运行时驱动器输出对应运行状态的电压输入电压比较器的引脚2。当电机正常运行时,电压比较器引脚2 输入电压低于堵转参考电压,电压比较器输出的高电平输入光耦二极管负极,光耦的输出关断使Vout 输出的高电平反馈输入RC7M 控制器IO 口,上位机检测到无刷直流电机正常运行。当电机运行出现堵转时,电压比较器引脚2 输入电压高于堵转参考电压,电压比较器输出的低电平输入光耦二极管负极,光耦的输出导通使Vout 输出的低电平反馈输入RC7M 控制器IO 口,上位机检测到无刷直流电机堵住运行,控制器IO 口控制无刷电机停转,从而达到保护电机的目地[5]。
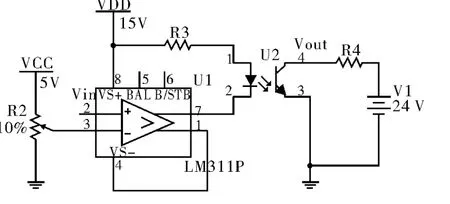
图5 电机过载检测电路图
4 系统软件设计与实现
4.1 机械手控制初始化
上位机和机械手控制器之间建立通信连接需要初始化,创建CAO Engine 对象、CaoWorkspace 对象、Cao-Controller 对象和CaoVariables 对象,系统通信连接建立后,上位机软件中CaoVariables 对象访问RC7M 控制器内变量,CaoRobot 对象初始化机械手运动,机械手控制初始化完成。
系统的初始化代码如下:

4.2 控制系统应用测试
上位机软件设计以Microsoft Visual Studio 2008 为平台,采用基于MFC 对话框开发的图形界面软件,软件的整体界面包括视觉显示和功能按钮两个主要部分,软件的整体界面图如图6 所示。视觉显示区域为操作人员手动控制机械手提供实时三维动态图像参考以及机械手运行状态的监控,功能按钮区域完成机械手装卸放射源过程中的机械手的运动控制和末端工具切换。

图6 放射源装卸流程图
实践测试结果表明基于工业机器人的放射源装卸控制系统能够快速高效的完成测井探针放射源的装入与取出,解决了测井公司放射源装配效率低和对操作人员身体危害大的问题,同时该系统具有无辐射、性能稳定,实用性强等优点,在测井探针放射源装配领域具有良好的发展前景。
5 结束语
工业机器人在测井探针放射源装配中的应用,既改善了测井人员的工作环境,使操作人员摆脱了放射性物质对身体的危害,又可以确保测井作业的安全生产,满足了测井作业高效安全的生产需求。本文设计的基于工业机器人的放射源装配控制系统具有操作简单、界面友好和维护方便等特点,该系统的成功应用提高了测井作业的自动化生产水平和测井探针放射源装配效率,降低了企业的生产成本,增强了企业的市场竞争力,对测井技术的发展具有重要意义[6]。
[1]王振玉,宋 黎,杨 斌,等. 放射源取样机的研制与应用[J]. 机械设计与制造,2012,(6)
[2]万 钊,耿南平. 放射源库机械手的应用[J]. 武汉汽车工业大学学报,1998,20(2)
[3]NetworRC provider DENSO Robot.[DB/OL]. http://www.densorobot.com/,2012-07-17
[4]康华光,陈大钦,张 林. 电子技术基础模拟部分[M].北京:高等教育出版社,2006
[5]张 兵. 直流无刷电机的建模与辨识[D]. 重庆大学硕士学位论文,2010
[6]陈立新,郭文彦. 工业机器人在冲压自动化生产线中的应用[J]. 机械工程与自动化,2010,(3)
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26 09:39:12
核安全(2022年3期)2022-06-29 09:17:50
核安全(2022年3期)2022-06-29 09:17:34
电子测试(2018年10期)2018-06-26 05:54:18
铁道通信信号(2016年12期)2016-06-01 12:12:02
测绘科学与工程(2016年5期)2016-04-17 06:51:20
通信电源技术(2016年1期)2016-04-16 04:57:29
电子器件(2015年5期)2015-12-29 08:43:12
机电信息(2015年3期)2015-02-27 15:54:53
同位素(2014年2期)2014-04-16 04:57:21
