
港口作业系统的结构建模及其HLA仿真
2014-12-17 08:35:26高鹏
大连大学学报 2014年6期
高 鹏
(大连大学 经济管理学院,辽宁 大连 116622)
0 引言
集装箱港口多式作业系统能够实现海运、公路、铁路集装箱多式联运中的转换作业,其作业性能对整个多式联运物流的效率有重要影响。集装箱港口多式作业系统是一种随机动态系统,目前,对其作业过程的研究主要包括作业系统结构、运营模式、装卸工艺分析建模等[1],由于其系统要素众多,要素间的关系复杂程度高,大多数采用仿真建模方法。目前广泛采用的系统仿真建模方法包括离散事件仿真[2,3]、Petri网[4]、多Agent 模型[5]等。但是,随着对多式联运系统中交通及物流链分析的对象及其复杂程度的日益增长,仿真模型的内部逻辑日趋复杂,使得当前的仿真建模工作面临着新的困难[6],主要是模型的庞大化和模型的可扩展性、互操作和可重用性等问题。对此,解决的根本出路在于利用基于网络技术的分布式仿真建模方法。
分布式仿真方法包括分布式多Agent 仿真、Web仿真和高层体系结构(HLA)仿真等。目前,分布式仿真的国际标准是IEEE 1516 HLA 标准。HLA 仿真具有可扩展的模型结构、可降低仿真建模的复杂性等优点,近年,已应用到航空运输、智能交通和供应链系统等的仿真建模[7-9]。
在进行港口多式作业系统分布式仿真建模过程中,如何将系统合理分解以及如何使已经分解的各子系统具有很好的交互一致性十分关键。对于前者,目前主要按从系统功能、位置、结构特点等角度进行人工区分和分解,如何从理论上对系统分解并找出各子系统间的关联关系是目前需要解决的问题;对于后者,则要在前者的基础上根据具体系统的关联特点进行交互性分析与设计。
对于复杂的系统来说,系统分解的目的是明确子系统的功能系统,建立系统各基本单元的结构模型,即结构建模。在结构建模中,解释结构模型方法(ISM)是一种用于分析复杂系统结构问题的方法。近年来,解释结构模型方法常被应用于管理信息系统[14]、知识管理中的障碍识别[15]、定性仿真建模[16]、垃圾分捡系统[17]等,这些研究表明通过ISM 可以很好的分析复杂系统中的要素间的结构关系。
本文以集装箱港口多式作业系统为对象,研究其分布式仿真建模方法问题、基于ISM 原理分析系统分解方法以及基于HLA 的模型与数据的交互性和一致性等关键问题,为解决复杂物流系统的仿真建模问题提出新思路。
1 系统的构成及活动分析
集装箱港口多式作业系统通过泊位、堆场、铁路场站、码头大门等不同区域的转换作业连接水运船舶、公路集卡和铁路火车三种不同类型的运输方式。系统中与作业相关的要素(实体)如表1 所示,其中,①②③⑫为活动实体,其它要素为作业资源或称固定实体。

表1 系统节点元素
这些要素相互协作完成各种不同的作业任务,图1 从作业时序的角度来描述港口多式作业系统中各种不同类型实体与不同类型的作业过程的对应关系以及其相互协作关系。图中的虚线框区分不同类型的业务活动,箭头表示不同子业务之间的消息传递。
(1)船侧作业:是集装箱在泊位与堆场之间的装卸与运输作业,作业活动过程如图1 中船侧作业虚线框内所示。首先由船舶到达港口为作业开始消息信号,船侧作业时,由岸桥为船舶进行装卸船作业,内卡在堆场由堆场装卸设备之间进行平行运输作业。作业完成后船舶离开泊位。
(2)铁路侧作业:是集装箱在铁路场站与堆场之间的装卸作业和铁路场站与堆场之间的货物运输,其活动过程如图1 中铁路侧作业虚线框内所示。由火车到达编组站为作业开始,火车作业完成后,需要在编组站重新编组,然后离开编组站。
(3)门侧作业:是指集装箱在大门与堆场之间的装卸作业和大门与堆场之间的货物运输,其活动过程如图1 中门侧作业虚线框内所示。由外卡到达大门入口为作业开始,外卡到堆场完成装卸作业后,返回大门出口,离开大门。

图1 集装箱港口多式作业系统作业关系图
2 系统的解释结构模型分析
在对上述系统建立基于HLA 的分布式仿真模型时,需要为系统建立各种联邦成员模型,前提是进行合理的模型分解,然后根据划分出来的子系统建立联邦成员模型。解释结构模型方法以图论中的关联矩阵原理来分析复杂系统的整体结构,将系统的结构分析转换为同构有向图的拓扑分析,继而转化为代数分析,通过关联矩阵的运算来明确系统的结构特征,达到系统分解的目的。
根据图1 所描述的系统各节点元素之间的活动关系,将集装箱港口多式作业系统的业务活动抽象为系统的信号流图,以描述系统中状态变量的相互关系,如图2 所示。在信号流图中节点表示系统中的变量,即对应表1 中的元素,节点之间的箭头及其方向表示变量之间的关系和方向。根据信号流图,可以对系统中变量之间的关系建立布尔连接矩阵,利用布尔连接矩阵可以对系统进行分解计算。

图2 系统信号流图
根据解释结构模型的原理,模型分解的具体步骤如下:
(1)建立系统流程图的n阶初始矩阵A(aij)n×n,并根据布尔矩阵运算法则计算其可达矩阵其中I为与A(aij)同阶单位矩阵;
(2)若R 中有0 元素,则说明系统是非强连接系统,既系统是可分,若系统可分,则计算得到的矩阵为对称矩阵,且元素为1 表示对应的节点为强连接,元素为0 表示非强连接;
(3)按照(2)的结果,根据是否具有强连接性,将节点集合S 分成m 个互不相交的子集,属于同一子集的节点为强连接节点,构成一个子系统。而后对节点重新编号模型分解矩阵。
根据图2 建立系统的要素的初始连接矩阵表达式A(aij),其中的行和列的标号对应图2 中的节点编号,矩阵阶数n=12,其中元素aij定义如下:

根据布尔矩阵的运算法则,得到可达矩阵R:

由于R中存在0 元素,可知系统信号流图是非强连接的,因此系统可以被分解。计算可达矩阵R的逻辑积为:

根据该矩阵,首先选取11j=,得到节点位置集合1{1}S= ;其次选取 2 2j=,得到集合再次选取j3= 3,得到集合S3= {3,6};再次选取j4= 4,得到集合S4= {4,5};再次选取j5= 9,得到集合S3= {9,10,11};最后选取j6= 12,得到集合S6= {12}。

经重新编号后的连接矩阵A(aij)变为A’(aij):

若将每个Si视为一个节点,则由矩阵A’(aij),可以得到Si(i=1,2,…,6)之间的连接矩阵B。

由矩阵B可以看出,在第4 行第1 列元素为1,说明S1和S4之间有交互关系,且S1中只包含要素1既船舶,是一个活动实体,因此为简化系统,将S1与S4合并,同理将S5和S6合并,得到新的集合为
对节点重新编号如下:

经重新编号后的连接矩阵A’(aij)变为A’’(aij):

由矩阵A’’(aij),可得到Si(i=1,2,…,4)之间的连接矩阵B’:

对A’’(aij)进行分块化简,分别用S1、S2、S3、S4和C1、C2、C3来表示子模块矩阵,其中,S1、S2、S3、S4分别表示堆场子系统、泊位子系统、大门子系统、铁路子系统;C1、C2、C3分别表示S1和S2、S1和S3、S1和S3的关系矩阵。简化后的A’’(aij)如下。

3 基于HLA 的分布式仿真建模
3.1 分布式仿真联邦的构成
本研究采用基于高层体系结构HLA(High Level Architecture)的分布式仿真平台进行建模。HLA 可将具体的仿真功能的实现、仿真运行管理和底层通信三者分离,并能保证系统各成员之间的互操作和重用[11]。根据HLA 系统运行框架的要求,整个仿真模型作为一个联邦,仿真联邦的架构如图3 所示。
联邦执行包括物流作业及信息流的处理过程[12]。联邦中设计了三类联邦成员:作业类联邦成员、信息管理联邦成员和作业管理联邦成员。
(1)作业类联邦成员:根据前述的系统分解结果,与S1、S2、S3、S4对应,可将系统作业类联邦成员分为四类:泊位成员(BF)、大门成员(GF)、铁路场站成员(RF)、堆场成员(YF)。各子系统被视为排队系统,因此可以对每一类作业联邦成员建立基于离散事件仿真模型。
(2)信息管理联邦成员:提供仿真试验的场景数据,收集各成员的仿真运行状况、各对象类的信息和仿真统计数据等。
(3)作业管理联邦成员:制定系统的作业计划,配置总体资源,在仿真运行后分析统计结果,评估仿真策略。

图3 港口多式作业系统HLA 仿真联邦结构
3.2 各仿真子模型的集成
各仿真子模型集成的关键:一是保证各仿真模型的数据的一致性,二是保证业务逻辑层中各业务模块之间的通信交互顺畅。为有效解决此集成问题,在对作业过程的分析的基础上,设计HLA 的联邦对象模型,定义联邦成员间的作业交互时序。
3.2.1 FOM 设计
FOM(Federate Object Model)用于定义联邦成员间交互的对象和事件,关注的是需在成员间共享与交换的所有信息,从全局的角度保证联邦间交互数据的一致性及可重用性,基本构成包括对象类和交互类。
对象类:对象类的设计根据图1 中纵向坐标轴上的对象。资源类(Resources)是系统中所有资源的公共抽象类,它的子类包括泊位、装卸设备、大门类,是系统的静态结构要素;运输工具类(Transport)是系统运输工具的抽象父类,包括火车、船舶、外卡、内卡四种运输工具类,是离散事件仿真模型中的实体;货物类(Cargo)指系统中的实体集装箱。各对象类及其与各成员对象的关系如图4 所示。

图4 分布式仿真系统对象类图
交互类:分布式仿真系统中联邦间的仿真事件是指作业类成员间的交互信息的发送和接收。根据对系统的分解结果,各系统间的交互关系实际上对应着货物从不同系统的转移。对此设置系统之间的交互类货物转移通知(CargoTransfer);同时,作业的开始和结束是由实体的到达和离开事件来标志的,因此对应着各货物到达通知(CargoArrives)和装卸完成通知(U/LComlpeted)两类交互类。交互类层次关系如表2所示。
3.2.2 联邦成员间的交互时序
各联邦成员之间的交互过程通过发送交互类触发其它成员的仿真事件,实现子系统之间的互操作,通过更新对象类属性改变自身系统的运行状态。图1所述的三个典型作业过程,对应三种交互过程,由于篇幅有限,仅以泊位作业成员(BF)和堆场作业成员(YF)间的作业交互为例说明成员间发送的交互消息时序及其含义,如图5 所示。

表2 联邦对象模型中交互类的层次结构表
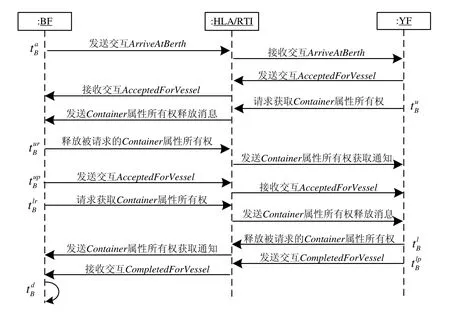
图5 联邦成员BF 和YF 间的交互时序图
4 结论
本文提出的采用解释结构模型对集装箱港口多式作业系统进行分析,并依据分析结果设计基于HLA 的分布式仿真模型的这一针对复杂的交互作业系统的建模思路。该思路通过解释结构模型有效的解决的系统的分解的问题,并且通过系统分析,有效的解决了分解后的子系统之间数据交互的一致性问题。可以预计:随着对象系统复杂程度的提高,分布式仿真方法将显示出其优势。本文为解决复杂物流系统的建模问题开辟了新思路
[1]张广存,张海霖,王雪峰.多式联运集装箱港口物流系统分析与建模[J].系统工程,2005,23(12):63-68.
[2]Qingcheng Zeng,Zhongzhen Yang.Integrating simulation and optimization to schedule loading operations in container terminals [J].Computers &Operations Research,2009,36(6):1935-1944.
[3]Maurizio Bielli,Azedine Boulmakoul,Mohamed Rida.Object oriented model for container terminal distributed simulation [J].European Journal of Operational Research,2006,175(3):1731-1751.
[4]Guido Maione,Michele Ottomanelli.A Petri net model for simulation of container terminals operations [J].Advanced OR and AI Methods in Transportation,2002,5:373-378.
[5]Lawrence Henesey,Paul Davidsson,Jan Persson .Evaluating container terminal transhipment operational policies:an agent-based simulation approach [J],WSEAS Transactions on Computers,2006(5):2090-2097.
[6]金淳,霍琳,高鹏.保税港区运营系统的仿真建模研究[J].系统工程,2007,25(10):70-76.
[7]Adelantado M.A-CMSI:An airport-common modeling and simulation infrastructure using high level architecture [J].Simulation Journal,2002,78(2):105-112.
[8]Lee J K.DEVS.HLA-based modeling and simulation for intelligent transportation systems [J].Simulation Journal,2003,79(8):423-439.
[9]Agostino G,Bruzzone,Roberto Mosca,et al.Agent directed HLA simulation for complex supply chain modeling [J].Simulation,2005,81(9):647-655.
[10]张福恩.大系统的分解[J].信息与控制,1980,9(4):26-31.
[11]Simulation Interoperability Standards Committee(SISC)of the IEEE computer Society.IEEE Standard for Modeling and Simulation(M&S)High Level Architecture(HLA)-IEEE Std.1516-2000,1516.1-2000[M].New York:Institute of Electrical and Electronics Engineers,Inc,2000.
[12]Chun Jin,Xuejie Wang.A HLA federation simulation modelling approach for multimodal transportation system of ports [J].International Journal of Services Operations and Informatics,2006,1(3):233-252.
[13]王刚,金淳,高鹏.Arena 与HLA 互联方法研究[J].系统仿真学报,2008,20(15):2429-2432.
[14]陈建明,黄平,张仲义.管理信息大系统的结构模型表示与分解[J].系统工程与电子技术,1999,21(7):20-23.
[15]M D Singh,R Kant.Knowledge management barriers:An interpretive structural modeling approach [J].International Journal of Management Science and Engineering Management,2008,3(2):141-150.
[16]夏文俊,李世其,王峻峰,等.基于结构模型化分析方法的定性仿真建模[J].计算机仿真,2010 ,27(12):83-88.
[17]Shankar Chandramowli,Morghan Transue,Frank A.Felder.Analysis of barriers to development in landfill communities using interpretive structural modeling [J].Habitat International,2011,35:246-253.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:06:44
智能建筑电气技术(2022年2期)2022-02-06 02:30:50
家庭影院技术(2020年10期)2020-12-14 07:54:16
铁道通信信号(2020年3期)2020-09-21 09:13:00
家庭影院技术(2019年7期)2019-08-27 02:42:06
运筹与管理(2019年1期)2019-02-15 09:26:42
铁道通信信号(2018年8期)2018-11-10 05:15:44
集装箱化(2014年12期)2015-01-06 18:31:36
集装箱化(2014年10期)2014-10-31 18:28:10
铁路通信信号工程技术(2014年1期)2014-02-28 16:55:27
