
直接功率控制的单相功率因数校正器
2014-12-14 07:40唐思文李印龙杨喜军
电气自动化 2014年1期
唐思文,李印龙,杨喜军
(上海交通大学 电气工程系,上海 200240)
0 引言
二极管整流桥后接滤波用电解电容,则无论后接何种负载,整个电路都属于非线性负载[1],使得网侧功率因数低,谐波电流含量高,不符合谐波电流的标准[2-3],为此需要采用有源功率因数校正(APFC)技术。单相APFC具有多种控制策略,如传统双闭环控制,可以获得良好的校正效果。但是对于双闭环控制策略[4-6],传统电压外环一般采用电压误差放大器,而不采用 PID调节器,其目的是为了稳定输出直流电压。电压误差放大器的惯性较大,影响了双闭环控制的动态响应速度,不适用于快速负载变化的应用场合。直接功率控制是一种根据功率需求的变化,实行砰砰控制,在三相PWM整流器[7]、三相有源滤波器等领域中得到了广泛的研究,具有响应快速的优点。在单相有源PFC领域,尚没有这方面应用的先例。基于以上考虑,本文提出了一种电压平方外环的直接功率控制策略,克服了双闭环控制中外环动态响应较慢的缺点,并且能获得网侧单位功率因数和稳定的直流输出电压,并通过MATLAB/Simulink的仿真分析,验证所提方案的正确性。
1 电路拓扑与工作原理
1.1 电路拓扑
单相功率因数校正器的电路拓扑如图1所示,升压电感L1、反向快速恢复二极管FRD1、斩波功率器件S1和电解电容E1构成升压电路;电阻R1为分流电阻,其端电压反映升压电感的瞬时电流;电阻R2为分流电阻,其端电压反映负载的瞬时电流;电阻R3和R4为分压电阻,分压后可以得到反映网压的正弦半波电压;电阻R5和R6为分压电阻,分压后可以得到反映输出电压的电压信号。
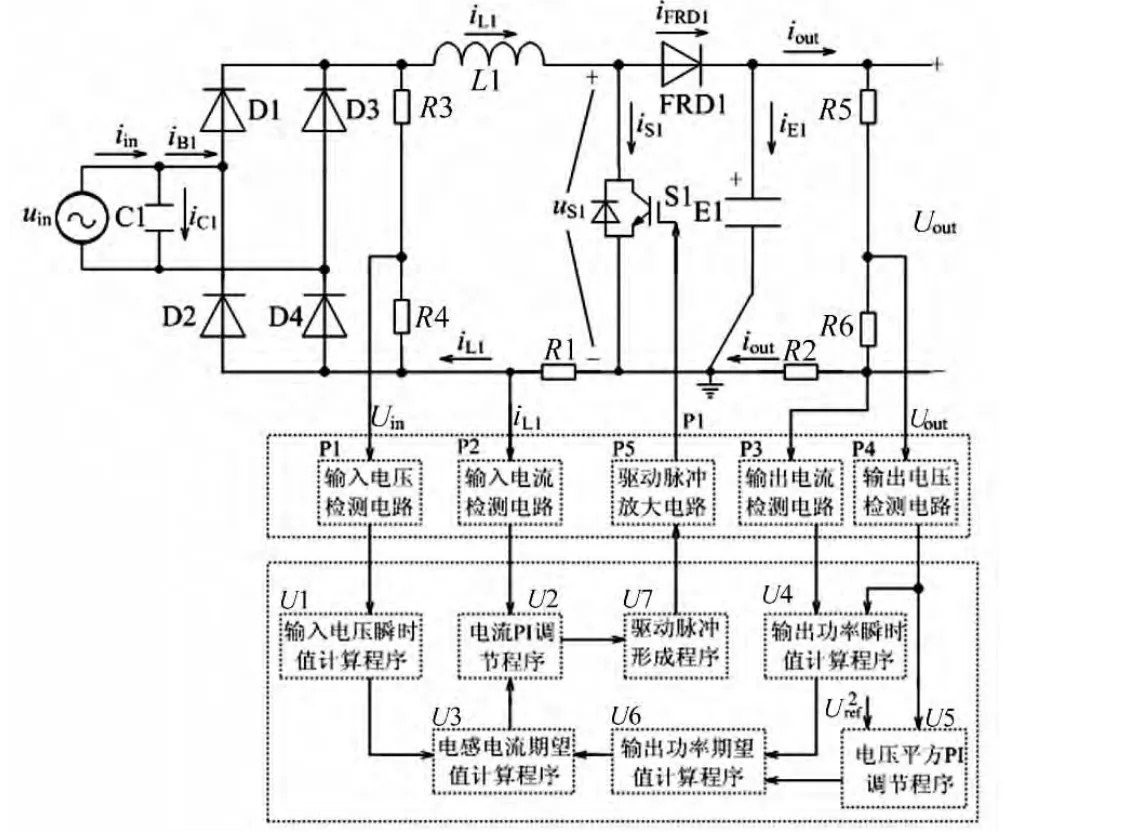
图1 直接功率控制的单相APFC工作原理
1.2 控制原理
假定网侧电压方程为:

式中Uin为交流输入电压有效值。
假定得到的网侧电流为纯正弦波,其方程为:

式中Iin为交流输入电流有效值。
功率开关S1只有两种开关状态:

等效占空比函数为d。
输出电压的瞬时值为uout,平均值为Uout。当忽略功率器件和分流电阻的压降,Sd=1时,uS1=0;Sd=0时,uS1=uout。
根据APFC电路的工作原理,可得:

可以建立以下差分方程:

从平均角度,输入功率等于输出功率,

但是从瞬时角度,输入功率不等于输出功率,

对于采用双闭环控制的传统APFC而言,其电压外环使用的目的是为了稳定输出电压,一般采用电压误差放大滤波电路,响应较慢,直接影响电流内环的响应速度。为此可以采用电压平方外环,在电压误差小的情况下,可以得到较大的电压平方误差,进而可以增加电流内环的响应速度。电压平方可以看作具有“输出功率”属性,因此可以增加功率控制环,实现直接功率控制。
鉴于瞬时输入功率不等于瞬时输出功率,因此单相APFC的直接功率控制宜采用输出功率,其直接功率控制原理如图1的控制部分所示,其核心部分为控制程序部分。
电压平方PI调节程序属于电压平方外环,负责根据测量得到的直流输出电压瞬时值,对其求平方,然后将给定电压(实际为已经平方后得到的给定电压)减去输出电压瞬时值的平方得到平方差,接着对平方差进行比例积分调节(PI),得到控制电压平方的控制量,该控制量是反映输出功率需求变化量的控制量,同时也是维持输出电压稳定不变的控制量。
输入电压瞬时值计算程序负责根据测量得到的输入电压模拟量,转换为电压数字量。
输出功率瞬时值计算程序负责将测量得到的输出电压有效值和输出电流有效值进行相乘,得到实时性较强的当前实际输出功率。
输出功率期望值计算程序负责将输出功率瞬时值计算程序得到的当前实际输出功率和电压平方PI调节程序输出的反映输出功率需求变化量的控制量相加,得到当前需要从电网获取的总功率需求,为直流量。
电感电流期望值计算程序是将当前需要从电网获取的总功率需求,除以输入电压瞬时值,得到输入电流的瞬时值,即电流内环的参考电流。该参考电流被送入电流PI调节程序。
电流PI调节程序将上述参考电流减去输入电流检测值,得到偏差电流,再进行比例积分调节,得到最终类似倒正弦波的占空比函数,送入驱动脉冲形成程序。
驱动脉冲形成程序负责将得到的占空比函数转换为原始PWM信号,该信号送入辅助电路的驱动脉冲放大电路。
驱动脉冲放大电路输出具有驱动能力的PWM脉冲,送入功率电路,驱动第一功率器件的通断运行,最终完成PFC的功能。
2 仿真分析
根据图1,利用MATLAB/Simulink建立了直接功率控制的单相APFC仿真电路,如图2所示,并进行了较为全面的仿真分析。
仿真参数:单相输入交流电压有效值220 V,期望额定输出直流电压平均值为385 V,纹波电压峰峰值为10 V。交流电容 C1为 0.47 μF,电感 L1为 0.5 mH,电解电容 E1为 1 410 μF,电阻R1、R2为 10 mΩ,R3、R4分别为 99 kΩ 和 1 kΩ,R5、R6分别为 222 kΩ和1 kΩ,参考电压平方为 3 V2,开关频率 35 kHz。
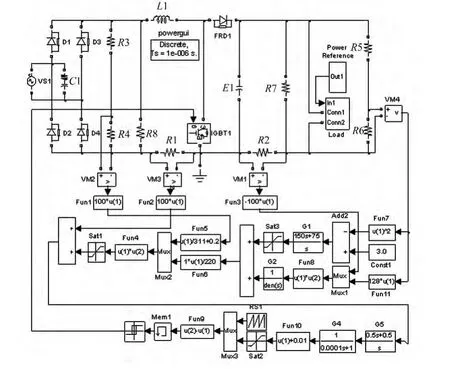
图2 直接功率控制的单相APFC仿真电路
经过反复的参数调整,进入稳态时,在任何输出功率条件下,都可以实现网侧电流波形与电压波形一致且同步,波形正弦度很高,说明获得满意的功率因数校正效果。当输出功率分别为1.0 kW、2.5 kW 时,网侧电压与电流的仿真波形分别如图 3、图4所示。
稳态时,直流回路电压的平均值为385 V,纹波电压峰峰值为6 V,输出功率2.5 kW时直流回路电压波形如图5所示。
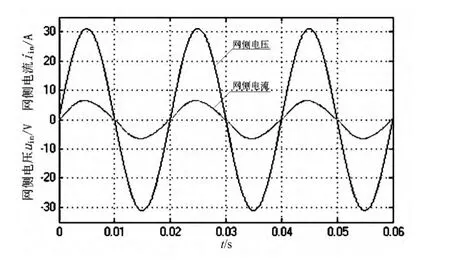
图3 稳态时网侧电压与电流的仿真波形(1.0 kW)
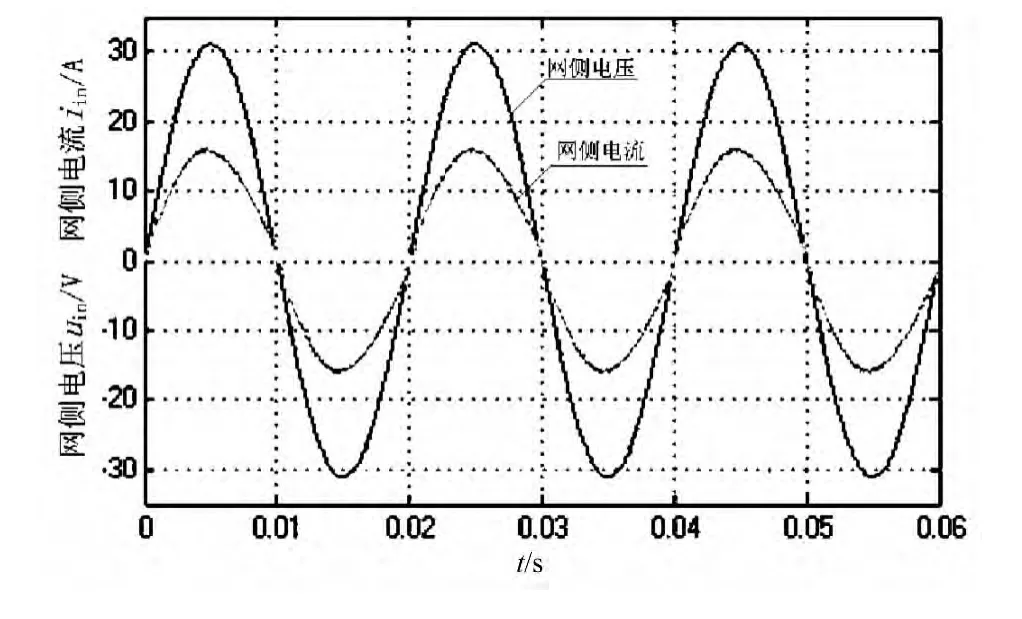
图4 稳态时网侧电压与电流的仿真波形(2.5 kW)
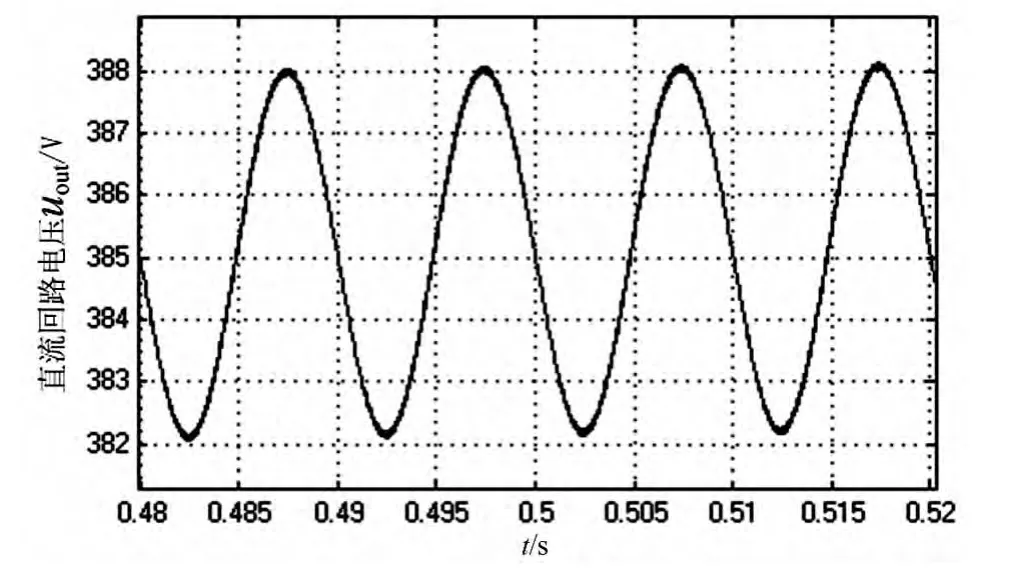
图5 直流回路电压的仿真波形(2.5 kW)
直接功率控制的优点就是对输出功率变化的响应速度较快。但是当突加突泻负载时,由于外环控制量突变,使得内环电流的给定量同步上升,造成输入过流。为了消除该缺陷,需要在电压平方外环和功率外环的输出增加阻尼环节,抑制内环电流给定量的陡增。为此,仿真中增加了一个时间常数为0.03 s的一阶惯性环节。
图6和图7分别给出了当输出功率由0.5 kW→1.0 kW→1.5 kW→2.0 kW→2.5 kW的网侧电流波形和直流回路电压波形,这是最严酷的情况。
显然,负载突变时,动态响应速度较快,当然其代价是负载突变后的前几个周期中,输入电流出现较大的变化率。由图7可见,负载较重时,稳定状态下输出电压平均值维持在给定值附近,纹波峰峰值较大。负载较轻时,纹波峰峰值较小,但是平均值略有下降。其原因是,轻载下,输出电压误差较小,外环产生的控制量偏低,致使电流内环输出的控制量偏低,APFC的整体占空比也就较低。

图6 变载时网侧电流的仿真波形

图7 变载时直流回路电压的仿真波形
3 结束语
提出一种基于电压平方外环的APFC直接功率控制策略,外环采用误差放大调节器,电流内环采用PI调节器,提高了APFC系统的整体响应速度。但是也会造成在负载突变情况下,输入电流会出现电流尖峰,引起过流故障。为此,需要对电压平方外环和直接功率控制外环采取阻尼措施,限制其输出控制量的变化率,在快速性和不出现系统过流情况下获得平衡。该结论得到了MATLAB/Simulink仿真分析结果的验证。
[1]林海雪,孙树勤.电力网中的谐波[M].北京:中国电力出版社,1998.
[2]IEC61000-3-2:1995“Electromagnetic compatibility Part3:limitsset.2:limits for harmonic current emission(equipment input current≤16A per phase)”[S].Switerland.IEC.
[3]IEC61000-3-12:2005,Electromagnetic compatibility(EMC)Part3-2:limits-limits for harmonic currents produced by equipment connected to public low-voltage systems with input current>16 A and(75 A per phase[S].Switerland.IEC.
[4]李冬,阮新波.高效率的BOOST型功率因数校正预调节器[J].中国电机工程学报,2004,24(10):153 -156.
[5]郑越,张代润,石晓丽,等.双环控制策略的有源功率因数校正电源研究[J].电源世界,2007,10(11):36 -39.
[6]Fernando Beltrame,Leandro Roggia, Luciano Schuch, José Renes Pinheiro.A Comparison of High Power Single-Phase Power Factor Correction Pre-Regulators[J].2010 IEEE International Conference on Industrial Technology,pp.625 -630.
[7]何致远,韦巍.基于虚拟磁链的PWM整流器直接功率控制研究[J].浙江大学学报(工学版),2004,38(12):1619-1622.
猜你喜欢
园林科技(2021年2期)2022-01-19
石油沥青(2021年1期)2021-01-11
中医眼耳鼻喉杂志(2019年2期)2019-04-13
测控技术(2018年9期)2018-11-25
筑路机械与施工机械化(2018年1期)2018-03-06
电子制作(2016年1期)2016-11-07
广西电力(2016年1期)2016-07-18
电气化铁道(2016年5期)2016-04-16
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年3期)2016-03-26
