基于iScan一体化移动测量系统的带状地形图测绘生产技术
2014-12-12 01:47:24龚书林
测绘通报 2014年5期
龚书林
(武汉海达数云技术有限公司,湖北武汉430000)
三维激光测量技术即通过对惯性导航、卫星定位、里程计、全景相机、计算机控制等模块的一体化集成,并固定在移动平台上,使空间三维信息的快速获取成为可能。iScan一体化移动测量系统正是这样一套一体化、高可靠、易运输、易安装的刚性体。
一、生产流程
基于iScan一体化移动测量系统的带状地形图测绘的主要流程包括:外业数据采集、内业数据处理提取、外业调绘、调绘成果成图等(如图1所示)。
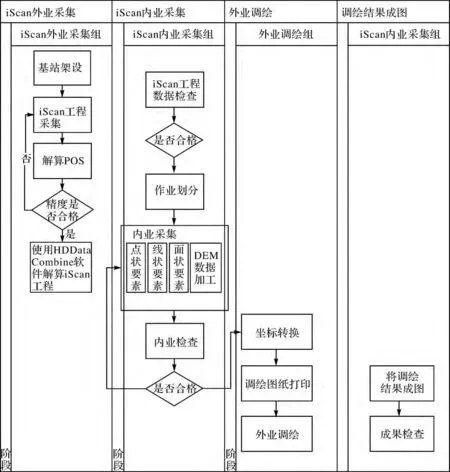
图1 生产处理流程
其中,外业采集阶段主要包括GPS基站静态数据采集、iScan工程采集、POS解算(结合基站静态数据、移动站数据、惯性导航数据、里程计数据等综合解算移动平台的每时刻位置和姿态)、根据POS和内部部件相对位置关系解算点云绝对坐标和全景影像位置和姿态。在内业处理采集阶段主要工作是点云数据预处理、基于点云与全景数据的地物要素采集、路面点云分类DEM数据加工等工作。
二、CAD环境下基于点云和全景测图
CAD软件在基础测绘领域具有广泛的用户群体,iScan产品配套带有“海达点云测图CAD插件”(HdPtCloudVector For AutoCAD),它提供在CAD环境下iScan工程管理、轨迹浏览定位、点云与全景浏览、矢量测图符号库、数字测图采集、数据成果导出等功能,如图2所示。
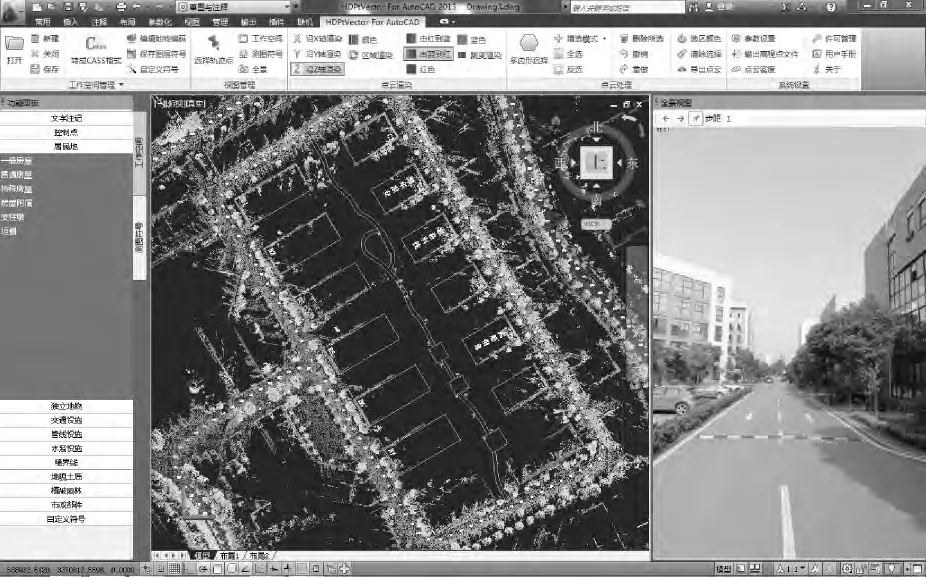
图2 CAD环境下点云与全景测图
“海达点云测图CAD插件”中支持系列比例尺地形图符号库、城管部件符号库、水文要素符号库等。点云显示同样有多种渲染方式,支持在全景影像上测量地物要素,量测宽高属性。
三、ArcGIS环境下基于点云和全景测图
ArcGIS软件在GIS行业内有众多用户基础,具有很强大的测图、编辑、建库、分析等功能,为此iScan配套软件中包含“海达点云测图ArcGIS插件”,提供在ArcGIS环境下加载显示iScan工程、点云在二维地图显示、轨迹浏览定位、三维渲染点云与全景显示、二维地图与三维点云联动、全景与二维地图联动,数字测图采集、全景测量、点云过滤等功能(如图3、图4所示)。

图3 ArcGIS下点云与全景测图
四、质量控制
1.iScan工程数据检查
1)检查POS解算的精度报告,0~10 cm为精度较高,0~50 cm为精度一般。

图4 ArcGIS下多数据源联合测图
2)检查点云数据是否完整,检查每个扫描头目录下是否有点云文件,是否有全景影像和轨迹文件。
3)检查影像数据是否完整,相机目录下是否有iScan-Image-1.db 影像数据文件、iScan-Image-1.hdi影像轨迹文件。
4)使用HD 3LSScene点云处理软件打开iScan工程,检查轨迹、点云、影像是否可以显示,全景和点云是否可以叠加显示。
5)检查每个扫描头点云是否可以叠加显示,以及叠加套合精度。
2.内业测图检查
在内业测图检查前需要将测图成果合并,并将iScan工程轨迹线合并,将测图成果和轨迹线坐标转换为底图坐标系。
1)检查测图成果和轨迹线叠加是否遗漏。
2)检查测图成果街边是否遗漏或重复。
3)检查坐标转换前测图成果和点云叠加量测精度是否正常。
4)将测图成果与底图叠加合并,检查符号显示是否正常,为后续打印调绘作准备。
3.成果检查
通过外业调绘,并将调绘成果成图后,最后还需要对成果进行检查。
1)调绘成果成图检查,检查外业调绘成果是否正确添加到成果中。
2)成果数据打印出图,外业抽查。
五、结束语
iScan移动测量系统是集多种传感器于一体的刚性平台,是三维空间地理信息快速采集系统,同时配套完整的内业处理生产软件,可以满足带状地形图快速采集更新要求,可广泛应用于市政规划、城市管理、地理国情普查等。
(本专栏由中海达和本刊编辑部共同主办)
猜你喜欢
上海理工大学学报(社会科学版)(2022年4期)2022-02-10 06:58:56
上海理工大学学报(社会科学版)(2022年4期)2022-02-10 06:58:56
戏剧之家(2021年28期)2021-11-14 18:06:27
西部交通科技(2021年9期)2021-01-11 12:55:36
智能建筑与智慧城市(2018年11期)2018-11-28 09:04:14
铁道勘察(2018年1期)2018-03-02 07:07:12
中国资源综合利用(2017年2期)2018-01-22 02:45:02
铁道勘察(2016年4期)2016-10-14 03:05:37
中国房地产业(2016年2期)2016-03-01 01:25:35
地球(2015年7期)2015-10-12 09:02:43