基于微机电系统的错位移动闭锁机构
2014-12-01 07:12郝永平李大顺刘双杰
探测与控制学报 2014年4期
郝永平,李大顺,刘双杰
(1.沈阳理工大学装备工程学院,辽宁 沈阳110159;2.沈阳理工大学机械工程学院,辽宁 沈阳110159)
0 引言
随着微机电系统(MEMS)技术的不断成熟和发展,MEMS器件在引信中的应用越来越受 到 重视[1-5]。目前,小口径榴弹引信中采用了MEMS安全系统,闭锁机构是该安全系统在保险状态下的重要机构,一个复杂的机构,要想实现预期的功能,除了保证各个部件的可靠性之外,还要考虑各个部分相关联的可靠性;对于MEMS安全系统来说,研究质量块运动到位后锁定其与基板的位置闭锁的可靠性是至关重要的。
但是典型的安全系统如美军开发的用于20mm的理想单兵作战武器(OICW)的基于 MEMS的S&A机构[6],基于MEMS的平板式的后坐悬臂梁安全系统[7]中的闭锁机构都是通过基板或者运动体上的闭锁的变形来实现其作用,由于变形处的刚度较大,在很小环境力下质量块可能出现运动不到位的情况,所以为了使安全系统的闭锁机构更加容易实现其功能,本文提出了基于微机电系统的错位移动闭锁机构。
1 典型闭锁机构的原理
闭锁机构的作用:质量块运动到位后,锁定质量块和基板的相对位置,保证传爆序列对正,顺利完成引爆。闭锁机构分为两部分:运动部件部分和基板部分。考核闭锁机构可靠性有两个指标:(1)运动部件能否顺利运动到位;(2)运动部件运动到位后能否可靠锁定。
如图1所示,典型机构由质量块、基板、拔销器和微弹簧组成。弹簧初始时刻处于预压状态,用拔销器将质量块固定好,当一定时间之后,拔销器工作,此时质量块被释放,在预压弹簧的推力(假设推力足够大)下,质量块向上运动,当质量块运动到与基板接触时,质量块上的卡头发生变形,先是收缩,当卡头完全进入基板卡槽内时,卡头回弹,此时闭锁就将质量块锁在基板的顶部。
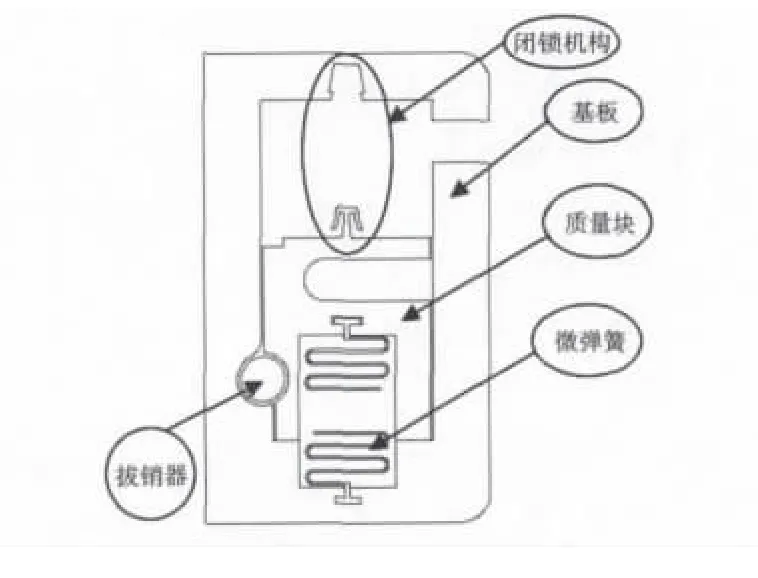
图1 典型闭锁机构模型Fig.1 Typical latching mechanism model
此闭锁机构的缺点:闭锁机构要想实现其功能需要变形,但此变形需要很大的力才能实现,此处的微弹簧的推力很小,不足以使其变形。
2 错位移动闭锁机构的原理
该机构如图2所示,适用于当闭锁机构锁住时,存在使质量块向脱开闭锁方向的力,其方向即如图所示的后坐力的方向;这样能够保证闭锁当受到外界扰动的时候仍能可靠的锁住。
错位移动闭锁机构的工作原理为:该闭锁机构由原来的双边弹性倒卡刺变为单侧刚性串联钩状齿,工作原理从原来的靠卡头的弹性变形运动到位变为利用装配间隙错位平移到位。即在预压弹簧的推力下,质量块向上运动,当质量块运动到与基板接触时,质量块上的闭锁牙1与基板上的牙2发生摩擦使基板向左运动,质量块继续向上运动,斜面3与4发生摩擦使质量块向右运动使质量块的牙与基板上的牙错位相对;由于此时弹簧的推力几乎为零,而后坐力仍然存在,能使质量块向下运动,但由于闭锁机构的存在阻碍其向下运动,从而使闭锁机构能够可靠地起作用。
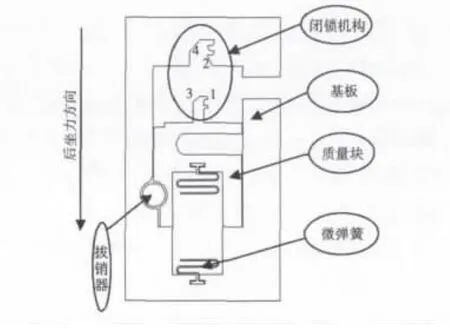
图2 错位移动法方案Fig.2 Dislocation moving france program
3 错位移动闭锁机构的验证
3.1 错位闭锁机构的仿真验证
该保险机构适用于具有持续存在的低过载后坐力弹药,例如肩扛式导弹、迫击炮弹等。设计环境力参数为:后坐过载力为10-16 g,且后坐力持续存在。
由于此闭锁机构是通过错位移动来实现其功能的,且应用的环境力又很小,导致闭锁的牙几乎没有变形或者变形很小,所以假设其为刚体只对其进行ADAMS的仿真验证。
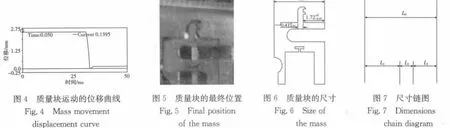
对此机构进行ADAMS[8]仿真,加载的后坐力为恒定值16 g,加载的时间为0.05s,仿真的总时间为0.05s,拔销器开始工作的时刻为0.03s,目的是验证质量块在后坐及弹簧力的合力的作用下,闭锁机构能不能可靠地起作用。运动的结果及运动的位移曲线见图3、图4。
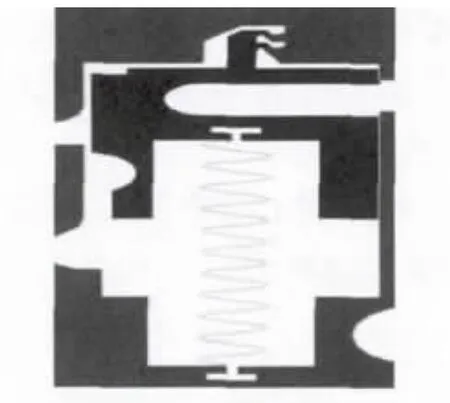
图3 质量块运动到位并锁住Fig.3 Mass movement and lock place
从图4可以看出质量块在32ms时运动到位(显示的位移为0mm),由于到达顶部时弹簧的推力几乎为零,而后坐力还是16 g并且在导弹碰撞目标之前一直存在,所以质量块在后坐力的作用下向下运动,但由于闭锁机构的存在阻碍了质量块向下运动,即当33.6ms时闭锁机构开始起作用,此时位移曲线上显示的位移为0.135 9mm,当到达50ms时位移没变。同时左侧还设有转销(图中未画出)能防止质量块运动到位后左右移动,所以闭锁机构能够将质量块锁死在基板的顶部,保证在需要时(起爆时)能够可靠锁定。理论上说明错位移动闭锁机构能够可靠的工作,进而验证设计是合理的。
3.2 错位闭锁机构的实验验证
为了模拟实际的应用情况,将整个机构固定在离心转台上,用离心力来模拟实际的后坐力,离心力的大小为16 g,弹簧的刚度为0.033 399N/mm,弹簧的初始推力为0.125 58N,质量块的质量为3.906e-5kg,即初始的加速度为328 g,用高速摄像机拍摄的实验的图片如图5,从图中可以看出质量块在弹簧和后坐力的合力作用下成功运动到了基板的顶部,并且被闭锁机构锁在了基板的顶部,和理论的仿真结果一致,实验结果表明错位移动闭锁机构在较小的推力下就能够可靠地工作,进一步验证了此闭锁机构的合理性。
3.3 闭锁机构的尺寸链验证
为了使闭锁机构可靠地起作用,需要保证质量块的加工尺寸在要求的范围内,所以对质量块进行尺寸链的验证。图6为质量块的设计尺寸图,图7为尺寸链图,图中L0=mm;L2=0.41;L3=1.72mm;L1为待求测量尺寸。L1、L2、L3为增环;L0为封闭环。
求得:L1=1.87mm,只要测得L1在公差之内,就一定能够满足设计要求。为了使质量块运动时不被基板卡死,要求与其相配合处的基板尺寸为4.
4 结论
本文提出了基于微机电系统的错位移动闭锁机构 ,该机构以两对错位移动的牙代替了原来的变形体方式的闭锁机构,通过ADAMS理论仿真及实物的实验验证,表明此闭锁机构在很小的初始推力下(微弹簧或其他的惯性力)就能够实现其锁死的功能。即错位移动闭锁机构在很小的推力下就能够满足实际的需求,同时平面微弹簧刚度不需要很大,为设计、制造带来方便。
为了验证此闭锁机构在振动下的可靠性,下一步还需做相关的振动试验。
[1]傅建中,胡旭晓 .微系统原理与技术[M].北京:机械工业出版社,2005.
[2]牛兰杰,张建,赵旭.基于有限元法的MEMS后坐保险机构运动特性研究[J].探测与控制学报,2006,28(4):15-18.
[3]冯鹏洲,朱继南,吴治亮.美国典型MEMS引信安全保险装置分析[J].探测与控制学报,2007,29(5:)26-30.
[4]徐伟,李志超,王炅.引信MEMS延时保险机构性能仿真分析[J].微纳电子技术,2010,47(12):757-761.
[5]张继桃,邵伟平.基于 MEMS的安全解除保险机构的设计与试验研究[D].沈阳:沈阳理工大学,2012.
[6]王世伟,郝永平,张德志,等.基于 MEMS的引信保险机构综合分析[J].探测与控制学报,2006,28(6):55-58.
[7]李志超,王炅 ,徐伟,等.引信 MEMS后坐悬臂梁保险机构[J].探测与控制学报,2010,32(5):42-45.
[8]李增刚.ADAMS入门详解与实例[M].北京:国防工业出版社,2010.
猜你喜欢
电子产品可靠性与环境试验(2022年2期)2022-05-14
奥秘(创新大赛)(2020年10期)2020-10-28
陶瓷学报(2020年3期)2020-10-27
科学导报(2019年55期)2019-09-28
科学与技术(2019年12期)2019-03-29
安徽化工(2018年6期)2019-01-11
山东工业技术(2017年18期)2017-09-12
科技视界(2017年9期)2017-09-04
科技传播(2016年12期)2016-07-05
新高考·高一数学(2016年3期)2016-05-19