
一种新型农药喷洒机的原理与设计
2014-11-28 08:17刘畅赵夫超朱林林张智
机械工程师 2014年6期
刘畅,赵夫超,朱林林,张智
(安庆职业技术学院机电工程系,安徽安庆 246003)
0 引言
现代农业生产中大棚种植的普及使得传统的农药喷洒出现了诸多问题,例如:普通的农药喷雾机,无论是肩背式还是车架式均由汽柴油机提供动力,而在密闭的大棚里作业极易造成燃油机尾气(CO)中毒现象;喷嘴离操作人员太近,即使佩戴口罩也无法避免操作人员吸入有害的农药雾化剂,严重损害身体健康;每次作业都需要加燃油,生产成本增加等不利因素都制约着现代农业的发展。
笔者通过观察和研究,利用机电技术设计出一款新型农药喷洒机,该新型喷洒机的优点在于使用直流电机作为动力,利用动力分配装置兼顾喷洒、搅拌和设备移动的功能。可实现多喷头、大面积喷洒和隔离式操作。既提高了生产效率,又节约了成本,还保障了使用者的健康。
1 基本设计思路
本设计包括固定装置、驱动装置和喷洒装置。固定装置主要用于承载支撑及有效整合驱动装置和喷洒装置。该新型农机的各机构均由直流电动机提供原动力,电机通过传动机构与3 个不同作用的机械离合器连接,实现3种不同的动力分配,分别驱动喷洒机行进、农药的均匀搅拌和农药的喷洒。
2 设备组成和工作原理
下面结合图1 对该新型农药喷洒机作进一步说明。
由图1、图2 可见,该新型农药喷洒机由固定装置(车底座)、驱动装置和喷洒装置3 个主要部分组成:固定装置、喷洒装置都与驱动装置上的直流主电机相连接;设备的固定装置包括底座,底座上设有驱动轴和转向轮,转向轮通过转动轴与转向手柄连接,驱动轴两端设有2 只塑料驱动轮,驱动轴的一端设有从动轮,从动轮经传动带与主动轮相连接,主动轮的一端通过移动离合器与直流主电机相连接,移动离合器用于断开和接合由主电机传送过来的动力。
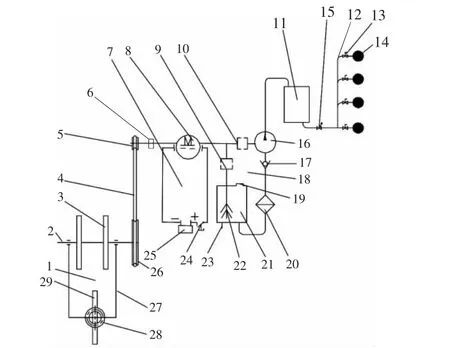
图1 主体结构示意图
该机构的驱动装置是设备的核心,它不但能提供机构行进的动力,而且还同时提供农药搅拌和喷洒的分动力;驱动装置包括普通蓄电池,蓄电池经过启动开关和直流主电机相连接;喷洒装置包括农药混合桶、缓冲罐和喷嘴。农药混合桶内设置有搅拌器,搅拌器与搅拌离合器相连,农药混合桶的上方设有加药口,下方设置有排污口;农药混合桶经过滤器、单向阀、液压泵与缓冲罐相连接,液压泵上设有泵离合器;农药喷嘴经球阀与调节软管相连接,而缓冲罐经设有旋塞阀的导管与调节软管相连接。
使用本设备时,先将蓄电池充足电,再闭合启动旋钮,然后将需要喷过的农药通过加药口加入农药混合桶,并以同样方式加入适量的水至农药混合桶里,启动搅拌离合器促使搅拌器工作,将农药混合桶的农药和适量水进行充分混和,待充分混合后即可断开搅拌离合器;启动泵离合器并打开单向阀,液压泵开始工作,农药混合桶里的混合药水经过滤器后由液压泵送到缓冲罐里,打开旋塞阀和球阀,混合药水随即经调节软管到达喷嘴,实现喷洒;启动移动离合器,直流主电机通过主动轮、传动带、从动轮、驱动轮带动固定装置向前移动,操作转向手柄和转向轮控制向前移动的方向,实现一边移动一边喷洒。
本设计还有另外几个亮点:(1)喷洒机构上设置有多个喷嘴,日常使用过程中,可根据使用面积及植物株杆高度,通过调节软管适当调节喷嘴的高度,最终达到药水喷洒均匀、适量的目标,充分实现药水的使用价值;(2)通过搅拌离合器的设置,实现搅拌彻底并提高自动化程度;(3)通过过滤器的设置,一方面可有效提高药水的纯度,过滤的杂质可以定时通过排污口排出,另一方面提高喷嘴的使用效率,同样可达到喷洒均匀和效率高的目的。当喷洒结束时,先断开移动离合器,固定装置停车;再断开泵离合器,让液压泵停止工作,最后关闭旋塞阀和球阀。
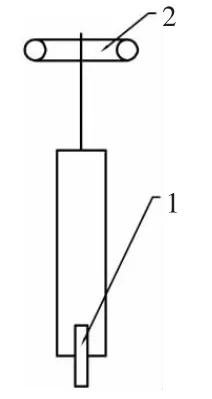
图2 转向轮结构示意图
3 行进控制与防护改进
本产品与市场上销售的喷洒机另一个不同之处就在于人机隔离机构和自动行进机构。目前常用的喷洒机除了是热机驱动外必须有驾驶员操作,而且驾驶室均为敞开式,即使某些产品喷嘴离驾驶员较远也难免会受到农药的侵害。本设计在驱动装置上加装一个有机玻璃罩,与起重机的驾驶室类似,这样便可以解决农药喷洒时附着人体的问题。本设计的初级产品仍是由操作者手动操作行进机构,但设计者在行进机构上预留了空间,用于今后在改进时加装自动行进控制设备,将可实现远程控制和无人操作。
基本设计思路是:利用车载芯片控制一部转向操作控制器,用于调节转向轮轴的转动角度。在车载控制板上赋予PID 调节功能,通过角度和速度检测及反馈系统调节车速和偏向角度。
具体的实施方法是:将直流电机经过减速器减速增矩后的转向力矩传递给喷洒机的转向轴,改进后的传动机构由一对传动齿轮和传动链组成,电机和减速器组合为一个整体,减速器的输出轴上安装一个直齿齿轮,该齿轮和转向轴上安装的齿轮通过链条传动,传动比为1.6:1。电机和减速器通过支架固定在底座上。用角位移检测装置检测出转向轮的偏角,与设定的目标航向比较求出航向偏差,通过PD 调节器的比例和微分调节控制转向轴的输出,不断调整转向轮的角度,从而达到自动行进的控制要求。
4 试制与应用
该农药喷洒机的设计由于设备零部件均为市场易购得的标准件和常用件,现已试制出产品模型,试运行的效果良好,但一些技术环节仍需改进和调整。目前已有多家厂商与设计者初步达成协议,规模化生产将指日可待。2013 年11 月,该设计(不包括自动行进部分)已成功申请国家发明专利,并已授权公示。此种新型农业设备具有制造成本低、工作效率高、无污染等特点。
[1]周俊,姬长英.农用轮式移动机器人视觉导航系统研究[D].南京:南京农业大学,2002.
[2]张智刚,罗锡文,李俊岭.轮式农业机械自动转向控制系统研究[J].农业工程学报,2005(1):77-80.
[3]陈文良,谢斌,宋正河,等.拖拉机电控液压动力转向系统的研究[J].农业工程学报,2006(10):122-125.
[4]李红伟.农业机械速度控制方式研究[J].广东农业科学,2010,37(9):214-216.
[5]杨欣,贾金霞,佟金.农业机械典型部件装配关联设计[J].计算机辅助设计与图形学学报,2006,18(1):156-159.
[6]郜立焕,杨毅,柴玉东.一种静液驱动系统变量泵控制装置[J].液压与气动,2008(7):70-72.
猜你喜欢
物联网技术(2022年11期)2022-11-22
数学小灵通(1-2年级)(2022年10期)2022-10-27
现代仪器与医疗(2021年2期)2021-07-21
数学小灵通(1-2年级)(2018年10期)2018-10-22
中国交通信息化(2017年10期)2017-06-06
三联生活周刊(2016年35期)2016-08-29
工业设计(2016年11期)2016-04-16
中国医学装备(2015年10期)2015-12-29
汽车文摘(2015年11期)2015-12-14
客车技术与研究(2014年5期)2014-02-28
