防浪板对两栖车辆航行姿态影响的数值模拟
2014-11-27 05:30:10周景涛曹凤利韩兰懿
火炮发射与控制学报 2014年3期
周景涛,曹凤利,韩兰懿,周 亮
(1.军械工程学院,河北 石家庄 050003;2.武汉军代局,湖南 长沙 410014)
由于两栖车辆具有“水上快速而隐蔽、陆上机动而灵活”等特点,在登陆作战中发挥着无可替代的作用,而如何提高水上行驶速度和行驶稳定性是两栖车辆研究的重要内容。其中,加装防浪板能够有效地减少阻力、稳定航行姿态[1],这一方法在两栖车辆设计中被广泛采用。通过模型静水拖曳试验可以研究防浪板对阻力、功率和航行姿态的影响[2-3],这种方法数据准确、可靠,但成本高、周期长。近年来,CFD(Computational Fluid Dynamics)软件逐渐成为两栖车辆学术研究和工程设计必不可少的工具,很多科研工作者对加装防浪板的两栖车辆绕流场进行了数值模拟[4-5],得出了防浪板对两栖车辆水上性能参数的影响,为两栖车辆的设计改进提供了参考[6],但均未涉及防浪板对航行姿态的影响。两栖车辆在水中行驶时,随着速度的变化,其航行姿态是不断变化的,如何将VOF多相流模型有效地用于两栖车辆航行姿态的性能研究分析,仍然有待进一步研究。
总结并借鉴上述研究经验,笔者采用滑移网格方法实现了航行姿态的变化,对加装防浪板前后的绕流场进行了数值模拟,分析了间歇式防浪板对航行姿态和绕流场的影响。
1 模型建立
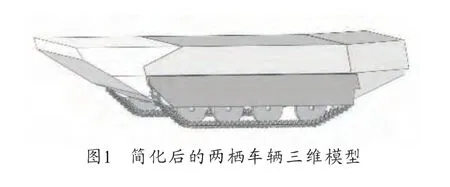
根据拖模试验的两栖车辆的外形尺寸,采用Solidworks软件建立了三维模型。模型的某些部件相切(例如履带和负重轮相切)形成小角度区域,这种有小角度的流场区域很难生成网格,即便能够生成网格,其网格质量也非常差,在Fluent中进行迭代计算时,模拟结果容易发散甚至无法进行迭代计算,所以在不影响绕流场的前提下,对三维模型进行了简化处理。简化处理后的三维模型如图1所示。
2 湍流模型
标准k-ε模型是一种两方程模型,在N-S方程的基础上,分别引入了关于湍动能k和湍动能耗散率ε的方程,同时考虑了湍流脉动速度的输运和湍流脉动尺度的输运,已经得到了广泛的应用并经受了大量的检验,是目前使用最广泛的湍流模型,标准k-ε模型为
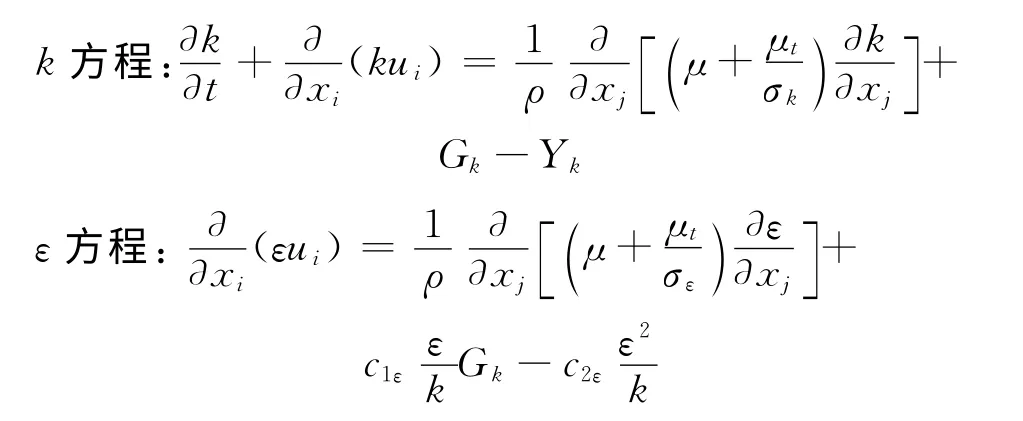
式中:Gk为湍动能k的 产 生 项;Yk是 耗 散 项;c1ε、c2ε为经验常数;σk、σε分别是与湍动能k和耗散率ε对应的Prandtl数;μt为湍流粘性系数;μ是分子粘性。
3 流场网格离散
假设两栖车辆在静水中行驶时,车体两侧受到的阻力完全相同,车体航行姿态在横向上不产生变化,所以可以将两栖车辆的航行姿态分解为吃水深和纵倾角的变化,吃水深指车体在竖直方向上的位移,纵倾角指车体在横向上绕重心转动的角度。
流场划分和离散如图2所示,将绕流场划分成3个区域。区域1转动时,可以实现车体纵倾角的变化。区域1和区域2 一起沿竖直方向上下移动时,可以实现车体吃水深的变化。通过调整3个区域间的相对位置,从而实现车体航行姿态的变化。

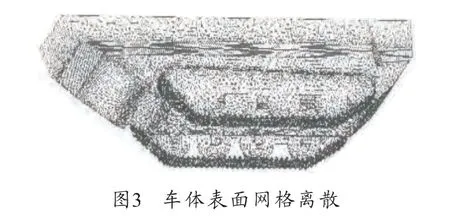
区域1是车体周围附近的区域,其流场几何形状极不规则,为了兼顾总体网格质量和网格数量,用一椭圆柱将区域1分成两部分,一部分是车体附近区域,采用适应性很强的非结构网格(四面体网格)对流场区域进行离散;另一部分采用结构网格进行离散,提高网格的总体质量和控制网格数量。车体几何形状变化剧烈的地方,流场的各个变量变化也较大,为了准确的模拟出流场的变化情况,应采用较精密的网格,并控制该区域网格的疏密程度,使车体附近的网格由密到疏向外扩散。车体表面网格离散如图3所示。
区域2是由区域1向区域3的过渡区域,目的是为了实现车体在竖直方向上的自由度。该区域采用棱柱形非结构网格进行离散,并使用Size Function进行疏密控制,以节省网格数量,生成的网格质量比较高。区域3的几何形状比较规则,距离车体相对较远,此处流场的各个变量的变化比较小,采用尺度比较大的结构网格进行离散,并通过控制线网格的疏密来控制整个区域的疏密。
3个区域的交界面采用相同网格进行划分,以减少截断误差,从而减少模拟结果的误差。自由面区域采用加密网格进行离散,能够较准确的模拟出车体周围的破波和航行波现象。
4 航行姿态确定
通过编写UDF程序,监测车体受到的浮力值和绕重心转矩,浮力和绕重心转矩根据下列公式求得:
式中:Q为浮力;Pi为车体表面第i个单元网格的压强;A[1]i为车体表面第i个单元网格在x轴方向上的投影面积;A[2]i为车体表面第i个单元网格在y轴方向上的投影面积;M为绕重心转矩;xi和yi为第i个单元网格坐标。
当模拟结果收敛时,链接UDF程序进行判断,根据判断结果不断调整3个区域的相对位置,直至浮力等于重力,绕重心转矩为0,此时,区域1竖直方向的位移就是吃水深,区域1转动的角度就是纵倾角。
5 试验和模拟结果分析
5.1 试验过程
试验在拖曳水池中进行,试验模型与实车比例为1∶2,模型外形与实车基本一致,能够反映出实车的物理外形,试验的研究重点是速度对航行姿态和阻力的影响。模型经过配重、防水等必要处理,本次试验进行了7种航速下的测量,每个速度点测量3次,取平均值。拖模试验过程如图4所示。
5.2 总阻力结果分析
总阻力模拟值与试验值对比曲线如图5所示。
从图5中可以看到,阻力的模拟值与试验值相差很小,曲线增长趋势一致,但模拟值比试验值偏大,主要是由于网格尺寸偏大和未计算到最终收敛造成的。速度较低时,有防浪板的模拟值略大于无防浪板的模拟值,这是由于速度较低时,增加了防浪板后增大了车辆的湿水面积,由于速度较低,防浪板没有起到压浪、减少兴波的作用。随着速度的增大,防浪板对减少兴波的作用越来越明显,有效地起到了降低阻力的作用,有无防浪板的兴波现象如图6所示。
5.3 吃水深分析
吃水深的模拟值与试验值对比曲线如图7所示。
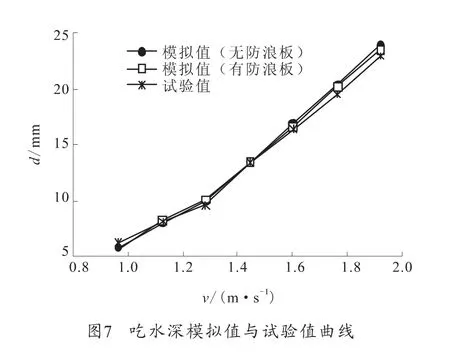
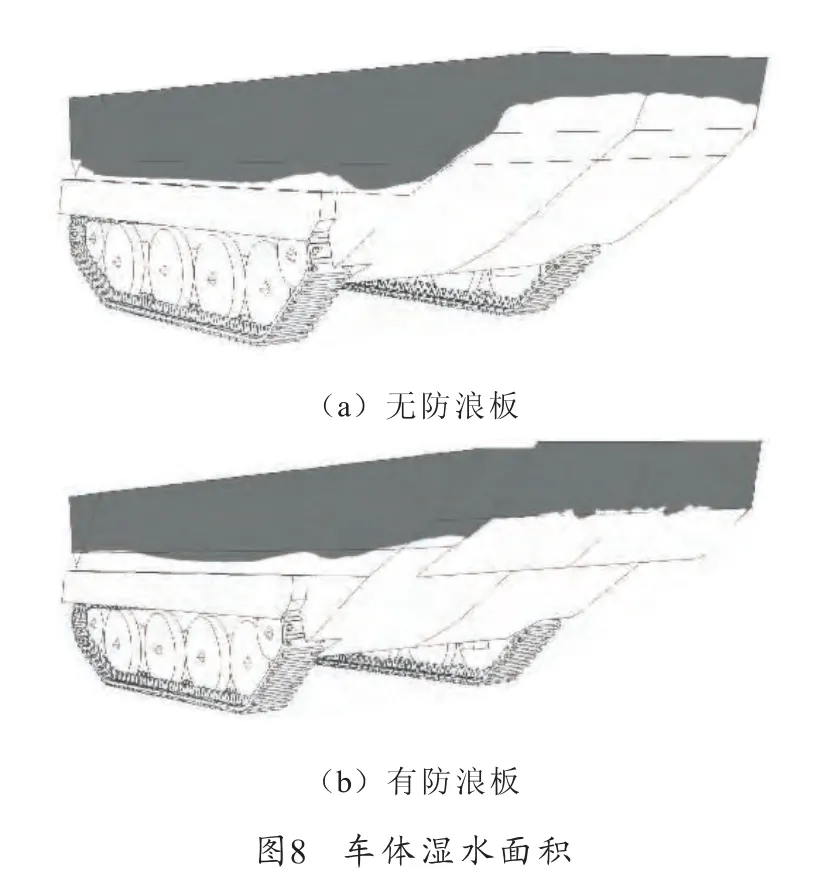
从图7中可以看出,模拟值和试验值相差很小,不超过5%,这主要是因为车体受到的浮力主要和其水深位置有关,受网格尺寸的影响较小。增加防浪板后,车体的入水角减小,车体受到水流的竖直向上的作用力增大,随着速度的增加,车体受到的竖直向上的作用力明显越大;而且增加防浪板后,兴波现象减小,湿水面积增大。车体受到的浮力增大,所以有防浪板车体的吃水深略小于无防浪板车体的吃水深。车体湿水面积如图8所示。
5.4 纵倾角分析
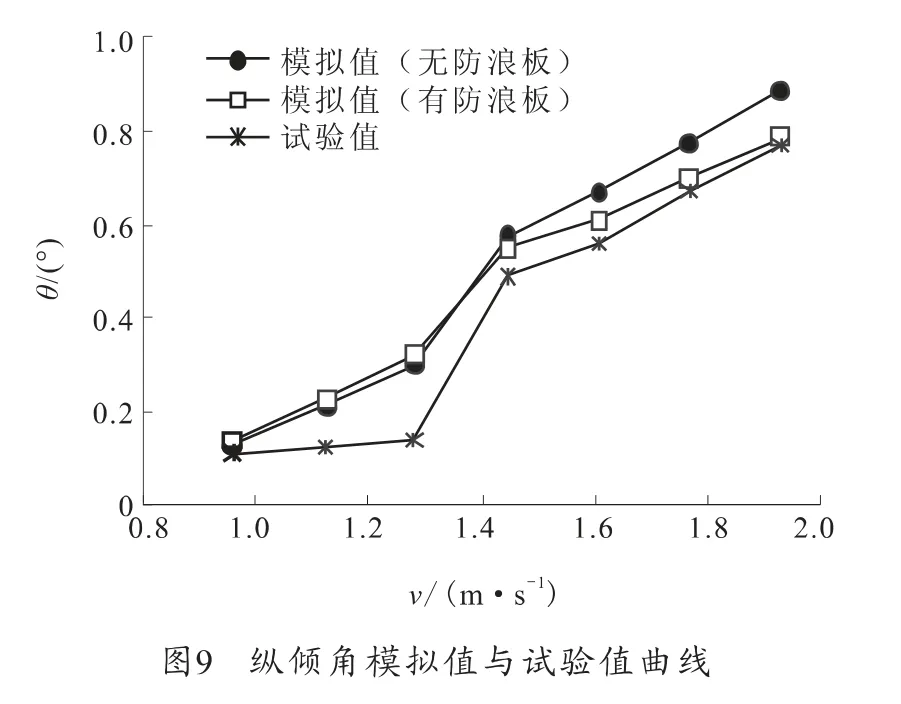
纵倾角的模拟值与试验值对比曲线如图9所示。
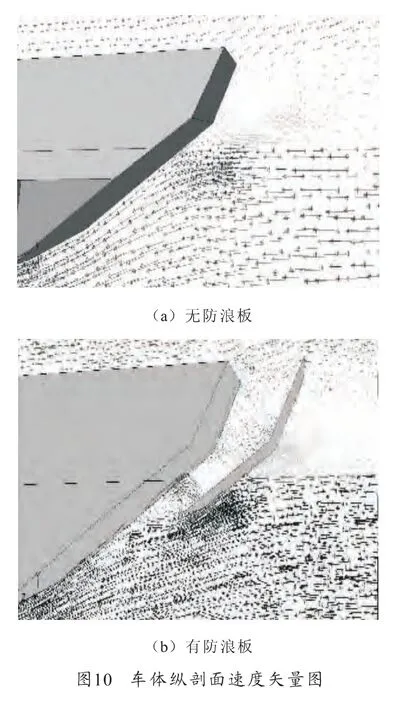
从图9中可以看出,纵倾角的模拟值明显大于试验值,这主要是由于自由面网格尺寸较大,造成模拟出的水面偏高,产生一个首倾的力矩;其次是由于纵倾角较小,测量值不准确,导致纵倾角的模拟值要大于试验值。随着速度的增加,防浪板的压浪作用越来越明显,有防浪板的车首的兴波现象明显小于无防浪板的车体,而且在车首产生漩涡,形成低压区。车体产生的首倾现象也较小,产生的纵倾角也较小。车体纵剖面速度矢量图如图10所示。
6 结论
采用CFD 软件对两栖车辆的绕流场进行了数值模拟,通过对浮力值等于重力值、绕重心的转矩为零的平衡关系,实现了车体航行姿态的变化,并分析了间歇式防浪板对总阻力、吃水深和纵倾角的影响,从结果看,在水上行驶速度较高时,间歇式防浪板在一定程度上能够减少水上行驶的阻力、吃水深和纵倾角,对提高两栖车辆水上行驶的稳定性能够起到一定的作用。
通过模拟值与试验值的对比分析,证明了笔者采用数值模拟方法对两栖车辆绕流场进行仿真研究是可行的,通过模拟结果还可以分析绕流场的压力、速度、漩涡等情况,对于车体的参数优化具有一定的指导意义。
(References)
[1]杨楚泉.水陆两栖车辆原理与设计[M].北京:国防工业出版社,2003.YANG Chuquan.Principle and design of amphibious vehicle[M].Beijing:National Defense Industry Press,2003.(in Chinese)
[2]施奇,杨大明,尹赟凯.船模拖曳水池静水阻力比对试验研究[J].江苏科技大学学报:自然科学版,2011,25(4):312-314.SHI Qi,YANG Daming,YIN Yunkai.Resistance test of ship model in towing tank[J].Journal of Jiangsu University of Science and Technology:Natural Science Edition,2011,25(4):312-314.(in Chinese)
[3]刘淑艳,陈长秋,闫为革,等.改进设计的两栖车辆水上性能试验研究[J].北京理工大学学报,2003,23(1):34-37.LIU Shuyan,CHEN Changqiu,YAN Weige,et al.Towing research on the model of modified amphibious vehicle[J].Transactions of Beijing Institute of Technology.2003,23(1):34-37.(in Chinese)
[4]李玉良,潘双夏.提高两栖车辆水上行驶速度的车体设计方案研究[J].兵工学报,2007,28(9):1116-1121.LI Yuliang,PAN Shuangxia.Research on amphibious vehicle body design concepts for raising its navigation speed[J].Acta Armamentarii,2007,28(9):1116-1121.(in Chinese)
[5]郭文凤,潘玉田.基于FLUENT 的轮式两栖车辆航行阻力数值模拟[J].中北大学学报:自然科学版,2013,34(3):240-243.GUO Wenfeng,PAN Yutian.Numerical simulation on sailing resistance of wheeled amphibious vehicle based on FLUENT[J].Journal of North University of China:Natural Science Edition,2013,34(3):240-243.(in Chinese)
[6]崔金一,赵又群,阮米庆.过渡型两栖车辆造型设计及水上性能数值分析[J].中国机械工程,2011,22(8):989-993.CUI Jinyi,ZHAO Youqun,RUAN Miqing.Transitional amphibious vehicle shape-designing and numerical analysis of its water performance[J].China Mechanical Engineering,2011,22(8):989-993.(in Chinese)
猜你喜欢
科学大众(2021年19期)2021-10-14 08:33:10
中国临床医学影像杂志(2021年6期)2021-08-14 02:21:46
疯狂英语·新读写(2021年6期)2021-08-05 07:49:10
北京汽车(2021年3期)2021-07-17 08:25:42
中学生英语(2017年6期)2017-07-31 21:28:55
青年歌声(2017年6期)2017-03-13 00:57:56
电力系统及其自动化学报(2016年5期)2016-12-01 03:13:00
焊接(2015年1期)2015-07-18 11:07:33
焊接(2015年1期)2015-07-18 11:07:33
机械制造与自动化(2014年1期)2014-03-01 04:21:44