
面向对象的遥感影像水田信息提取方法研究
2014-11-26 12:06王昌满WANGChangman赵俊三ZHAOJunsan
价值工程 2014年5期
王昌满WANG Chang-man;赵俊三ZHAO Jun-san
(昆明理工大学国土资源工程学院,昆明 650093)
(Faculty of Land Resource Engineering,Kunming University of Science and Technology,Kunming 650093,China)
0 引言
随着要遥感影像分辨率的不断提高,地物的空间信息变得非常丰富,采用传统的基于像元的的光谱信息提取技术已经远远不能满足高分辨率遥感影像信息提取的要求。根据高分辨率遥感影像的特点,Baatz M(1987)等根据高空分辨率影像的特点提出了面向对象的遥感分类方法[1]。Baatz M(2000)等基于异质性最小的原则提出区域合并分割算法,实现了影像对象的多尺度认知模型构建[2]。Hofmann(2001)等使用DEM 作为高程专题层参与影像分割,利用IKONOS 影像提取了建筑物、道路,使建筑物、道路的形状得到了更正确的体现[3]。在国内,面向对象的遥感影像分类方法也取得了很大的进展。黄慧萍(2003-2004)等用高分辨率IKONOS 影像,采用面向对象的多尺度遥感影像分割方法,自动提取了大庆市城市绿地覆盖信息,取得较好的效果[4]。莫登奎(2005)等基于模糊聚类的面向对象分析方法,对株洲市城乡结合部土地利用信息进行提取,精度高,速度快[5]。前人对面向对象影像信息提取做了很多的工作,本文利用eCogniton 软件,结合高分辨率遥感影像的空间特征对地信息进行提取。
1 面向对象遥感影像信息提取方法的研究
向对象的信息提取核心问题是将遥感影分割成为一个个影像对象,综合影像对象的光谱、形状、纹理、层次、邻域、空间位置、类间关系等特征信息对影像进行分割得到同质对象,再对影像对象进行信息提取和分析。
1.1 影像的分割 影像分割的关键就是面对遥感影像进行分析,分割的好坏直接影响到信息的提取和识别的精度。[6]不同的地类有它的一个最优分割尺度和分割参数,目前最优的分割尺度和分割参数都是通过反复的实验得来的。国内外已经提出了许多数字图像分割算法,有些是全自动的,有些是半自动的。大致可把影像分割的方法分为两大类:一是自上而下的方法(top—down),即知识驱动的方法(knowledge driven methods);二是自下而上的方法(bottom—up),即数据驱动的方法(data driven methods)[7]。eCognition 中提供了3 种分割方法:四叉树分割,棋盘分割和多尺度分割[8]。四叉树分割是将影像分割为不同尺寸的正方形,它通过在尺度参数里定义每个正方形的色差进行分割的。四叉树分割性能良好,结果合理,目前主要应用于细胞分析,可以很好地区分背景和前景。棋盘分割是将整景影像或者感兴趣的区域分割为较小的相同大小的正方形。棋盘分割可以细化影像,但是也将连续的同质影像分为若干个小区域,棋盘分割多用于大影像的分块,为了处理大影像,把他们剪切为小块来分别处理。多尺度分割是按照从下往上的方式进行的,主要是基于区域合并的算法,以单个像元为生长点,采用区域生长的算法生成小的影像对象,反之在形成较大的影像对象,在两者合并过程中,影像对象遵循异质性最小原则进行合并。因此,分割尺度参数较大的将会产生较大的影像对象,而较小的尺度参数将会产生较小的影像对象。多尺度分割是一种最优化的过程,最大限度地减少影像对象异质性,同时有最大的同质性。图像区域的异质性f 包含光谱异质性和形状异质性两方面,其计算式为:

式中,hcolor表示光谱异质性,hshape表示形状异质性,wcolor表示光谱相对于形状的权重,而1-wcolor则为形状的权重。
1.2 特征知识库的构建 影像对象特征作为区别不同地物的知识,常被用一些数学模型表达式作为对象特征的定量描述方法,对象特征包括光谱、形状、纹理、层次和专题属性等特征[9]。提取的水田包括三个部分:有庄稼的水田(水田A),覆盖地膜的水田(水田B)和未种植的水田(水田C)下同。
论文采用采用以下几个特征构建提取水田信息的知识库。
①Green-Ratio(绿波段比值):用来提取植被的一个常用指数。

其中,red:红波段的值,blue:蓝波段的值,green:绿波段的值。
②Brightnees(亮度):一个影像对象的光谱平均值除以图层数。

③Length/Width(长宽比):长宽比可以将纤细的物体与圆形和方形的物体区分开来,可以将道路了居民地区分开来。长宽比用边界框来近似为:

其中:a 为外接矩形的长,b 为外接矩形的宽,f 为矩形的填充度,A 为影像对象的面积。
1.3 影像对象的分类 面对遥感影像对象进行分类,不仅要考虑到影像对象的特征,还要考虑两者之间相关的特征,结合人的思维模式,提取出符合实际的目标,以此来提高精度信息。由于影像对象的各种特种的描述都是从不同的角度进行区分的,这样才能够更好地定量影像对象特征提供信息提取的标准和依据。在高分辨率遥感影像信息提取时,综合多个特征才能较好地分类出各个地物类别,因此,需要构建一个多维特征空间分类模型。
常用的分类方法有最邻近分类法和模糊分类法。最邻近法分类法是通过训练样本的对象构建多维的特征空间,然后由邻近的匪类器进行计算,这样就能按距离的大小给各个类别赋予0-1 之间的隶属度值,距离越小,隶属度值越大。模糊分类方法是基于地类在多尺度空间的特性,类别特征的描述是通过隶属函数来实现,把像元的类型特征值转换成0 与1 之间的模糊值,以此来判定某一地类在一个空间尺度上的隶属度。
2 面向对象的水田信息提取实验研究
2.1 实验数据 数据源采用QuickBird 影像,影像的拍摄时间为2008年5 月,空间分辨率为0.61 米,地物清晰可见,有3 个光谱波段。
本文选取昆明市晋宁县某镇827×701 个像元作为研究区域,见图1。研究区域区域内地形不复杂,以水田为主和居民地为主,对水田信息提取有很高的要求。
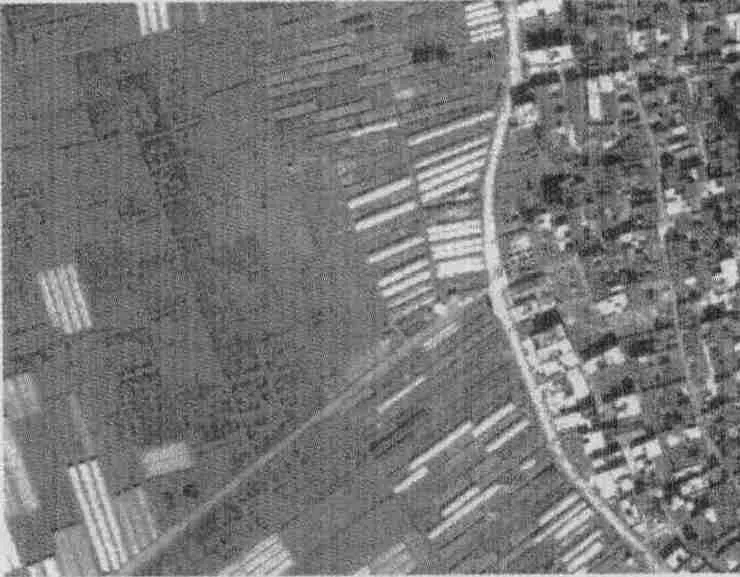
图1 原始影像图
2.2 多尺度分割及分类 本文将影像分为居民区、道路、水田A、水田B 和水田C 五类来提取,采用面向对象的多尺度分割方法,设置参数中波段的权重全部为1。本文在同一图中对影像进行多次分割和分类,总体分割图如图2。

图2 分割效果图
2.2.1 居民区的分割及提取 由于本文的重点研究对象为水田,居民区的小路和建筑的阴影等全部列入居民区内,对居民区在LI 层中的最优分割尺度为300,选择颜色因子权重0.8,形状因子权重0.2,紧致度权重0.8,光滑度权重0.2。为了避免居民区和其他地类之间的同普异物现象,采用大尺度分割对居民区进行最邻近分类,分为居民区和非居民区。
2.2.2 道路的分割及提取 eCognition 中在同一层中对影像对象层进行分割时,若分割尺度小于要分割的影像对象原的分割尺度时,Level Usage 选择Use Current。实验对非居民区进行分割对道路提取的最优尺度为80,选择颜色因子权重0.8,形状因子权重0.2,紧致度权重0.2,光滑度权重0.8。
对于道路而言,从影像上可以看出,道路的光谱特征和几何形状特征比较明显,在形状特征中,长宽比(Length/Width) 特征非常明显,由于道路和地膜的长宽比很难区分,但在光谱特征中,道路和地膜的亮度差别很大,因此,采用特征知识库中的式(3)和(4)对道路信息进行提取,对道路提取的特征参数值为:Length/Width ≥7 并且Brightness≤180。
2.2.3 水田A,水田B 和水田C 的分割和提取 实验继续对现在的除居民地和道路的非居民区进行分割提取对水田A、水田B 和水田C,最优分割尺度为30,颜色因子权重0.7,形状因子权重0.3,紧致度权重0.9,光滑度权重0.1。
水田A 提取时,采用公式(2)进行模糊分类。水田B的亮度比较明显,分类的时候采用公式(3),取Brightness≥180。把非居民地中未分类的对象全部设置为水田C,最终的影像分类结果见图3。
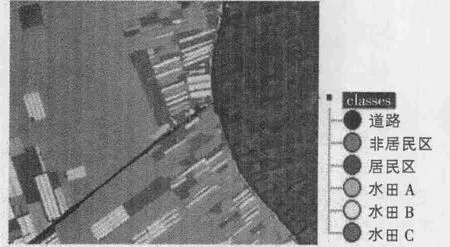
图3 影像最终分类结果图
2.3 分类后处理 粗分类后的影像需对一些分类错误的类别调整。eCognion 中通过growing 和shrinking 两种模式来平滑地类的轮廓线。合并和平滑后的分类结果见图4。
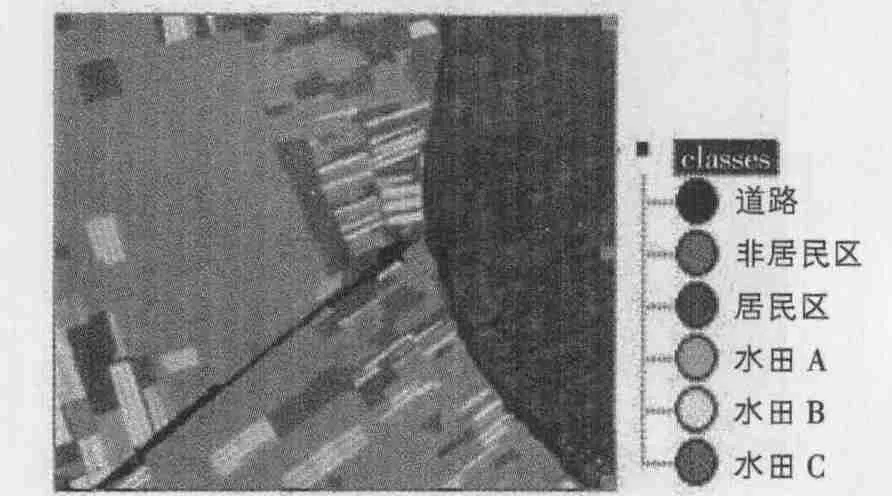
图4 影像分类处理后的效果图
2.4 信息提取的精度评价 精度的高低决定了信息提取结果的可信程度,我们常用的精度评价方法主要有三个,即分类稳定性评价法、最佳分类评价法和误差矩阵统计法。分类稳定性评价法和最佳分类评价法是从隶属度的角度进行精度评价。面向对象的信息提取的方法是基于模糊的概念,因此,本文就是我们采用分类较为稳定的评价法对信息结果进行精度评价。
分类稳定性评价法,主要是通过统计最大隶属度与次大隶属度之间的差值来评价提取结果的稳定性。当差值越大,影像对象的结果提取就较为稳定,反之,影像对象的隶属关系不够明确。本文主要通过统计影像对象的均值、标准差、最小差值和最大差值对评估结果进行分类,见表1。

表1 分类稳定性评价结果
由表1 我们不难看出,整个影像的分类都较为稳定。而且道路、水田B 和水田C 的分类特征很明显,但是稳定性较高,居民区光谱特征比较复杂,水田A 比较分散,因此分类结果稳定性稍低。
3 结论
本文主要针对水田信息的提取,居民区内部的复杂信息没有分类提取,在以后的研究中该把居民区内部做一个详细分类。在面向对象的分割和分类过程中,没有一个标准,更多的是靠主观因素去判断,在今后的学习过程中如何减少主观因素且保证精度是一个主要研究方向。
[1]Baatz M.,Schape A.Object-Oriented and multi-scale image analysis in semantic networks [A].In:Proc of the 2nd International Symposium on Operationalization of Remote Sensing [C].August 16-20th 1999.Ensehede ITC.
[2]Baatz M.,Schape A.Multiresolution Segmentation:An Optimization Approach for High Quality Multi -scale Image Segmentation [J].2000.
[3]Hofmann P.Detecting buildings and roads from IKONOS data using additional elevation information,GeoBIT/GIS,2001,6:28-33.
[4]黄慧萍,吴炳方,李苗苗等.高分辨率影像城市绿地快速提取技术与应用[J].遥感学报,2004,8(1):68-74.
[5]莫登奎,林辉,孙华等.基于高分辨率遥感影像的土地覆盖信息提取[J].遥感技术与应用,2005,20(4):411-414.
[6]明冬萍,骆剑承,周成虎,等.高分辨率遥感影像信息提取及块状基元特征提取.数据采集与处理,2005,20(1):34-38.
[7]谭衢霖,刘正军,沈伟.一种面向对象的遥感影像多尺度分割方法[J].北京交通大学学报,2007,31(4):111-114.
[8]黄亮,左小青,张晓晓,等.面向对象的道路信息识别提取分析.昆明理工大学学报(理工版),2010,35(6):6-10.
[9]Definiens Image Company.eCognition User Guide [M].German,2004.
猜你喜欢
新世纪智能(英语备考)(2020年3期)2020-08-11
现代装饰(2020年5期)2020-05-30
畅谈(2018年17期)2018-10-28
电子测试(2018年15期)2018-09-26
电测与仪表(2017年24期)2017-12-19
中学生博览(2016年17期)2016-09-10
现代计算机(2016年12期)2016-02-28
浙江工商职业技术学院学报(2016年2期)2016-01-22
IT时代周刊(2015年9期)2015-11-11
河南科技(2014年10期)2014-02-27
