
地感线圈在车辆通行自动检测控制系统中的应用
2014-11-26 12:07邓奕DENGYi鞠静文JUJingwen
价值工程 2014年5期
邓奕DENG Yi;鞠静文JU Jing-wen
(①汉口学院协同创新中心,武汉 430212;②武汉理工大学自动化学院,武汉 430070)
(①Collaborative Innovation Center of Hankou University,Wuhan 430212,China;②College of Automation,Wuhan University of Technology,Wuhan 430070,China)
0 引言
LC 振荡电路是模拟电子技术中比较重要的部分,其在日常生活中有着重要的应用,本文通过改变LC 振荡电路中的电感值来改变输出波形的频率,进而通过单片机实现控制电机的目的[1]。这种技术广泛应用于挡车器的电路中,其作用是在档杆下落过程中其下方有车辆时可以自动感应车辆,并且使档杆升起防止砸中车辆,因此具有很高的实用价值。
1 系统结构简介
本控制系统框图如图1 所示,主要由地感线圈、地感线圈检测电路、单片机、电机驱动电路和单相电机组成。其工作原理是:地感线圈检测是否有车辆经过,如果有车辆经过则地感线圈电感值发生变化导致振荡电路输出波形的频率改变,单片机检测到频率改变,从而输出控制信号,通过驱动电路控制单相电机运转。检测电路采用了三点式LC 振荡电路,振荡电路输出类似于正弦波的波形,当电感L 的值改变时输出波形的频率发生变化,这个频率变化被单片机检测到,当频率变化大于设定的阈值时,输出控制信号驱动电机,从而实现通过线圈电感量的变化控制电机的正反转。
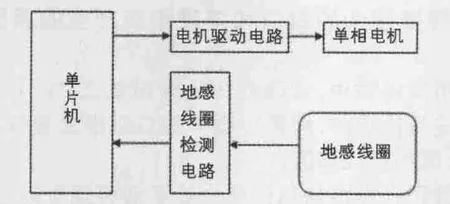
图1 系统框图
2 地感线圈检测电路设计
地感线圈检测电路如图2 所示,其采用LC 电容反馈三点式振荡器(考毕兹电路),它的优点是:振荡波形好;电路的频率稳定度较高,适当加大回路的电容量,就可以减少不稳定因素对振荡频率的影响;工作频率范围比较大,可直接利用振荡管的输出、输入电容作为回路的振荡电容[2,3]。

图2 地感线圈检测电路
本设计中地感线圈的电感量在没有车的情况下为100uH-150uH 左右,当有车辆经过时电感量降低为50uH左右,输出波形的频率有明显的提高。从振荡电路输出的波形还要经过整形电路变为方波,以便于单片机的检测。整形电路主要由一个LM339 电压比较器构成,当输入电压高于同相端电压时输出高电平,低于同相端电压时输出低电平,从而实现了将正弦波信号整形为方波信号。检测电路输出的方波信号送入单片机的CCP 口,CCP 口是单片机的脉宽捕捉模块,该模块有三种工作模式:输入捕捉,输出比较和脉冲宽度调制输出[4]。本次设计中采用了它的输入捕捉功能。捕捉输入的脉冲宽度的变化,也就是频率的变化,当超过设定阈值时输出控制信号。为了验证结论的正确性,设计过程中运用Multisim 10.0 软件对振荡电路进行仿真,将输出波形的周期进行了比较。图3、图4 中横坐标和纵坐标的量程和单位均相同,目的就是为了直观地了解到周期的变化。
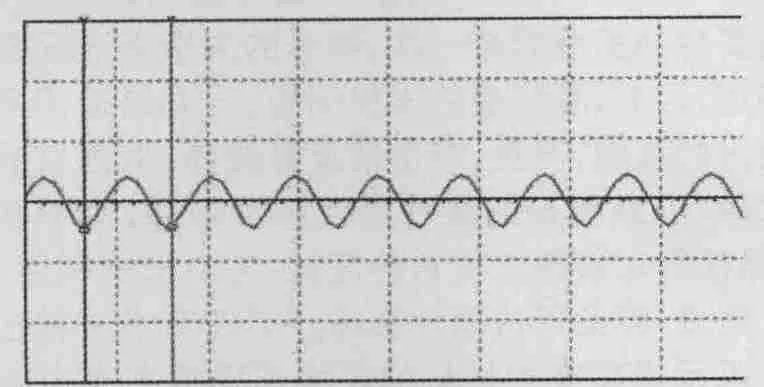
图3 150μH 地感线圈检测电路输出波形图

3 电机驱动电路设计
电机驱动电路如图5 所示,它主要起到以下几个作用:①将单片机输出的控制信号转换成可以驱动电机的驱动信号;②控制电机的正转和反转;③当单片机控制信号输出错误(例如同时输出高低平时)时可以将电机互锁,防止损坏电机。
电机驱动电路采用了单相力矩电机,两个继电器KK和KG 分别是电机的正转开关和反转开关。Q1 和Q2 是两个开关三极管,当单片机从RA0 或者RA1 输出一个高电平时,开关三极管Q1 或者Q2 导通,继电器通电吸合电机转动,同时在继电器的线圈回路上设置了常闭开关,当一个继电器吸和就会使另一个继电器的常闭开关打开,从而达到互锁的目的。
4 单片机软件设计

图5 电机驱动电路

图6 程序流程图
本设计采用了PIC16F877 单片机,它具有CCP 口,可以捕捉脉冲宽度的变化。单片机的I/O 口设置为RA0 口输出电机正转的控制信号,RA1 口输出电机反转的控制信号。程序开始后CCP 口处于检测状态,实时捕捉脉冲宽度,在没有车辆的情况下,脉冲宽度保持一个定值,当有车辆经过时CCP 口捕捉到脉宽的变化,当变化超过设定的阈值时,单片机从RA0 口输出高电平控制电机正转,档杆抬升。抬升到一定位置后下落,这时如果没有车辆经过则一直下落到底,如果此时有车辆经过,必然引起线圈电感量的变化,输出波形频率改变,单片机检测到变化,并输出信号控制电机停止反转,转为正转,从而达到通过线圈电感量的变化控制电机的目的。程序的流程图如图6 所示。
程序中延迟的作用主要是给车辆通过预留出时间,另外在CCP 模块捕捉的时候也需要加入延迟环节,目的是消除车底盘末端离地面过高或带有拖车的车辆对测量的影响。
5 结论
本文通过对挡车器的研究,提出了一种在车辆通行自动检测控制电路中应用地感线圈的方法。对其硬件电路进行了设计,并通过仿真验证了方案的可行性。该方案可以满足实时自动检测车辆并提升档杆的要求,达到防止档杆砸中车辆的目的,具有较高的实用价值和应用前景。
[1]林峰,严瑾,叶振洲,邵建文.新型地感线圈测速仪检定装置关键技术研究[J].自动化仪表,2012(08):64-66.
[2]叶振洲,严瑾,林峰,邵建文.电流型地感线圈测速仪检定装置[J].轻工机械,2012(02):57-59.
[3]郝宪锋,刘广孚.机动车地感线圈测速仪校准系统的设计与实现[J].科学技术与工程,2009(13):3912-3914.
[4]林仲扬.利用地感线圈测速时遇到的问题及解决方案[J].中国计量,2012(06):88-89.
猜你喜欢
大电机技术(2022年4期)2022-08-30
中国特种设备安全(2021年5期)2021-11-06
模具制造(2019年7期)2019-09-25
通信电源技术(2018年5期)2018-08-23
电源技术(2015年1期)2015-08-22
电测与仪表(2015年16期)2015-04-12
汽车维护与修理(2015年6期)2015-02-28
电测与仪表(2014年13期)2014-04-04
河南科技(2014年14期)2014-02-27
河南科技(2014年11期)2014-02-27
