
一种利用相电感的内置式永磁同步电机无位置传感器控制方法
2014-11-25 09:34:56黄文新卜飞飞
电工技术学报 2014年7期
邱 鑫 黄文新 卜飞飞
(南京航空航天大学江苏省新能源发电与电能变换重点实验室 南京 210016)
1 引言
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)由于具有较高的功率密度和效率,被广泛应用于生产生活[1-3]。但是它的高性能控制需要精确的转子位置,所使用的位置传感器不仅增加了成本,而且降低了系统整体可靠性[2-4]。因此,永磁同步电机的无位置传感器控制近年来成为研究的热点[4,5]。尤其在低速运行时,永磁同步电机中反电势等信息无法有效利用,因而零速和低速下的无位置传感器控制一直是研究的重点和难点[5]。
现有永磁同步电机的静止和低速无位置传感器控制方法主要有高频注入法[4,5]和齿槽谐波法[6]等。其中高频注入法根据注入方式的不同可分为旋转高频注入[4]和脉振高频注入[7]方法,分别针对凸极式和隐极式PMSM 提出,它们的机理均是根据电机固有凸极或人为创造的饱和凸极,利用高频信号提取出隐藏的位置信息。内置式永磁同步电机(Interior Permanent Magnet Synchronous Motor,IPMSM)由于自身固有凸极性,使其无位置控制更具有天然优势[10-12]。因此,文中以IPMSM 为对象作无位置传感器控制研究。
现有基于旋转高频注入的IPMSM 无位置传感器控制算法多从同步旋转变换后的交直轴电感角度出发[4-12],使用闭环凸极跟踪观测的方法得到估算位置,取得了优秀的效果。但是这类方法涉及到一系列旋转坐标变换及跟踪观测器,结构较为复杂,计算繁复。IPMSM 的转子位置信息同样蕴藏于电机三相电感之中,利用相电感估算位置具有简单直观的优点,但现有方法多从电感具体数值计算入手,如文献[8]提出的一种利用滞环控制直接计算相电感的位置估算方法。然而,由于铁磁材料的非线性,IPMSM 的相电感在不同磁路饱和程度时将会有较明显的变化,导致这类试图直接利用相电感数值估算位置的方法难以实用。
为了有效利用相电感中转子位置信息,同时避免转子位置估算对电感具体数值的依耐,本文首先分析了IPMSM 中相电感的成分,在此基础上利用相电感差消除其中的直流分量。进一步以矢量形式表示所得相电感差并进行迭代处理,得到细分电感矢量簇。对电感矢量簇的幅值简单比较运算,即可得到估算转子位置信息,并依此对电机矢量控制。与传统高频注入方法相比,文中所述转子位置估算方法不需要坐标变换等运算,具有简单可靠的结构,易于实现,而且对电感参数变化不敏感。实验表明,该方法可在静止和低速下稳定带载运行,并具有良好的动静态性能。
2 基本原理
2.1 IPMSM 的相电感
如图1 所示,忽略铁磁材料饱和和绕组谐波的影响,以A 相绕组轴线为零位置,理想内置式永磁同步电机的三相绕组自感Laa、Lbb、Lcc和互感Mab、Mbc、Mac可分别表示为[8,9,14]
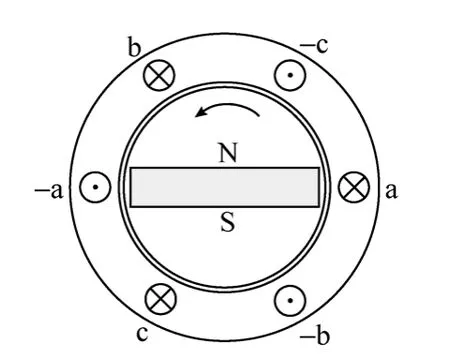
图1 理想IPMSM 结构Fig.1 The ideal structure of IPMSM
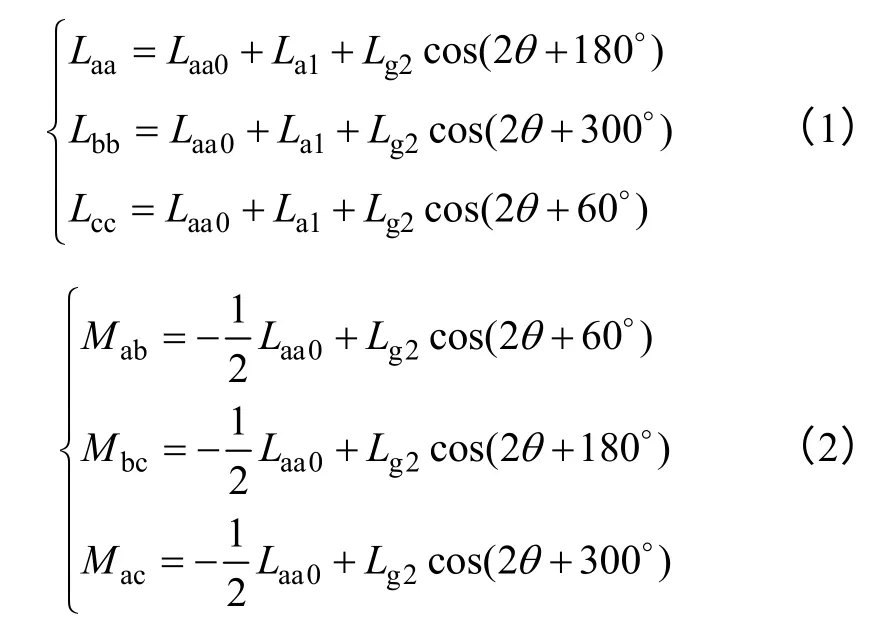
式中 Laa0——由气隙基波磁场引起的自感分量;
La1——电枢漏感分量;
Lg2——由转子位置改变引起的自感分量。
三相绕组相电感La、Lb、Lc由自感与互感共同构成,以A 相为例,根据电感基本公式,可得到相电感的表达式为

式中 ψa——A 相绕组磁链;
ia——A 相绕组电流。
结合式(1)和式(3)可得

同理可得Lb和Lc的表达式,并以图形表示,得到三相绕组相电感波形如图2 所示。
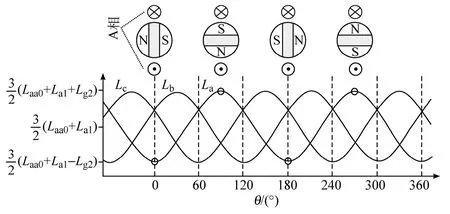
图2 相电感与转子位置之间的关系Fig.2 The relationship between the phase inductance and rotor position
由图2 可知,IPMSM 三相绕组相电感与转子位置存在对应关系。根据式(4),由于磁路磁阻的特性,相电感以转子位置的2 倍频率交替变化。
2.2 电感矢量簇
根据上文分析,虽然IPMSM 的相电感随位置正弦变化,但是在实际应用中,相电感中直流分量3(Laa+La1)/2 和正弦变化量幅值3Lg2/2 随电机工作状况变化,难以直接利用其中的位置信息。为有效利用相电感中位置信息,文中利用相电感差Lab、Lbc、Lca,即
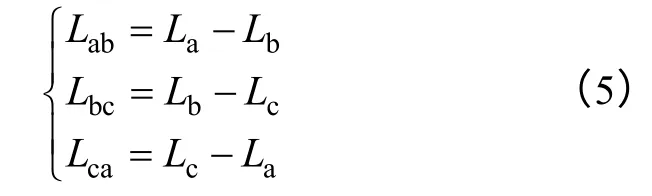
化简可得
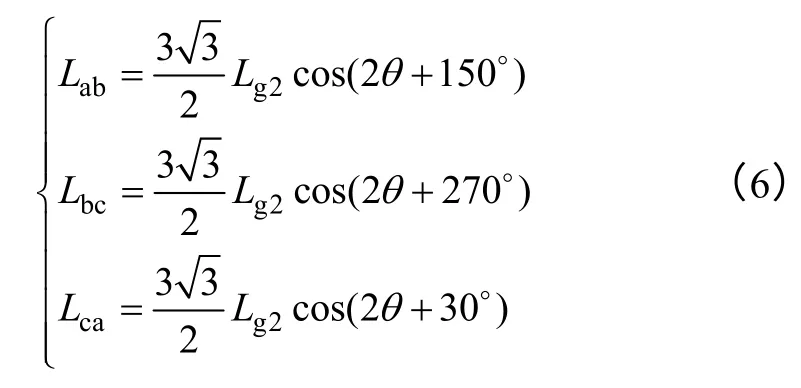
可以发现,相电感中原有的直流分量被消除,所得相电感差在理想情况下为正弦波。为叙述方便,在三相静止坐标系中以矢量形式表示相电感差,得到如图3 所示的电感矢量Lca、Lab和Lbc,将对应180°(电角度)转子位置的平面空间平分为3 等分。
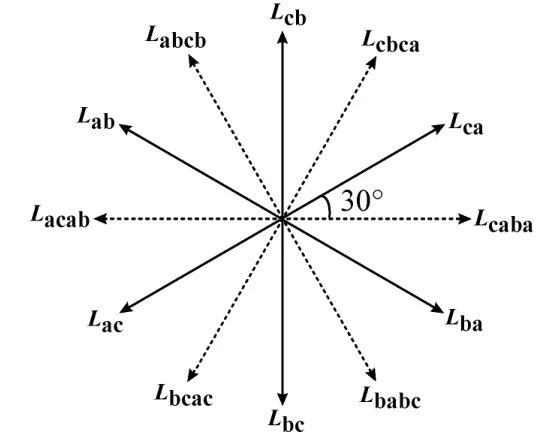
图3 电感矢量迭代处理Fig.3 The iteration operation of inductance vectors

由此得到迭代规律:n=0 时,起始电感矢量数为3,相邻电感矢量经n 次两两求和运算后得到矢量个数为3 2n× 的电感矢量簇,每次求和结果需要除以衰减系数k,以保持矢量幅值恒定
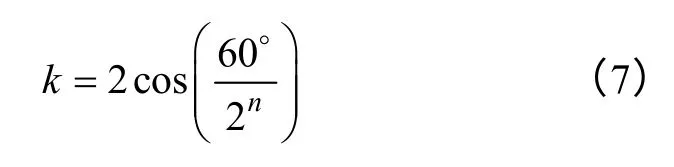
式中,n 是大于等于0 的整数。
n 次求和处理后的电感矢量簇将对应180°转子位置的平面空间3×2n等分。
2.3 电感矢量簇与转子位置关系
如图2 所示,为提取相电感中隐藏的位置信息,简单直观的方法为通过比较相电感之间的大小,并根据其中数值最大的相电感确定转子位置。如此可将一个电角度周期的转子位置平分为6 份,得到分辨率为60°的位置信号。由于磁路的特性,相同的电感关系在一个电周期中出现两次,分别对应于转子N 极与S 极,因此需要结合初始磁极判断方法将两者分开[13]。
上文所述电感矢量簇与转子位置具有类似的关系,而且因为电感矢量簇理论上可以无限迭代,所以可无限细分转子位置区间,得到更高精度的转子位置信号。以n=2 为例,使用Matlab 工具绘出电感矢量簇曲线,如图4 所示。

图4 电感矢量簇与位置关系(n=2)Fig.4 The relationship between inductance-vector cluster and rotor position(n=2)
由图4 可知,通过比较电感幅值大小,便可得到转子位置信息,对应关系见下表。

表 电感矢量簇与转子位置关系Tab. The relationship between inductance-vector cluster and rotor position
由图4 和表1 可知,当n=2 时,180°位置空间被12 等分,即可达到15°电角度的位置分辨率,能满足一般应用时IPMSM 的起动要求。随着n 增加,可分辨的位置精度越高,分辨率为(60/2n)°。
理论上,可辨识的位置精度可无限提高,然而辨识的精度与电机相电感的波形和对称性等因素相关,因此也与电机本体设计相关。为获得更高的位置估算精度,需要对电机电感优化设计。
3 利用相电感的IPMSM 无位置传感器控制
3.1 相电感与转子位置辨识方法
根据上文分析,IPMSM 转子位置与电感簇存在对应关系,但所需电感簇源于相电感的计算。文中借助旋转注入高频电压矢量的方法间接获得相电感。
当以较高频率向电机三相绕组注入旋转电压矢量时,施加在三相绕组中的高频电压具有相同幅值,此外由于电机的高频相感抗远大于相电阻,可以得到如下关系:

式中 Zah,Zbh和Zch——三相高频阻抗;
Vah,Vbh和Vch——三相高频电压幅值;
Iah,Ibh和Ich——三相高频电流幅值,可由图5 所示滤波器得到。
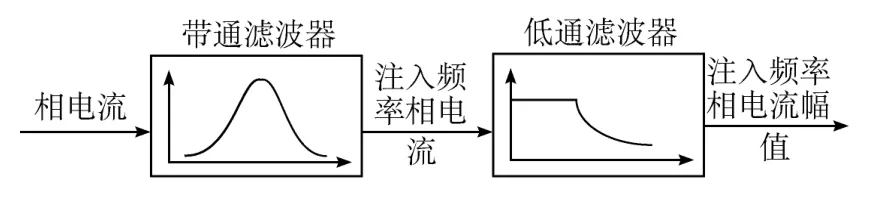
图5 高频电流滤波器Fig 5 Filters for extracting amplitudes of HF currents
由式(8),根据所加高频电压幅值和滤波所得高频电流幅值,经过简单计算得到相电感数值,根据上文所述方法得到电感矢量簇,进而通过比较得到转子位置信息。
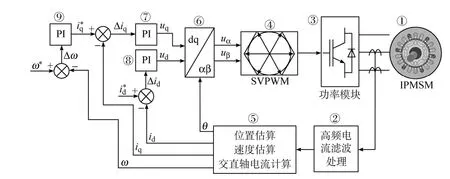
图6 利用相电感的无位置传感器矢量控制策略总体框图Fig.6 General block diagram of sensorless vector control strategy based on phase inductance
该转子位置辨识方法的特点主要在于,转子位置信息与具体电感数值无关,仅与电感幅值大小关系相关。因此,该方法对电机负载变化引起的三相电感整体变化不敏感,而且不需要坐标变换和追踪观测器等复杂计算,具有简单可靠的结构。
3.2 无位置传感器矢量控制结构
将上述转子位置估算方法应用于矢量控制中,得到一种利用相电感的无位置传感器矢量控制策略,其结构如图6 所示,包括①内置式永磁同步电机;②高频电流滤波处理单元;③功率模块;④空间矢量调制单元;⑤电机变量处理单元,包括转子位置、速度估算,交直轴电流等参量计算;⑥坐标变换单元;⑦⑧⑨分别为直交轴电流和速度PI 调节器。
4 实验研究
为验证所述位置估算方法和控制策略的正确性,搭建如图7 所示的拖动实验平台。其中,实验样机为一台内置式永磁同步电机,其额定功率为1kW,额定转速为1 000r/min,额定转矩为10N·m,极对数为 3,最大电流 Imax=20A,永磁磁链 ψf=0.23Wb;负载为一台由变频器驱动的5.5kW 异步电机,运行于转矩控制模式,模拟输出负载扭矩。被测样机非负载轴端安装一4 096 线位置编码器用于对比估算位置;被测样机与异步电机之间安装一转矩转速传感器以精确标定负载转矩和转速。
样机控制器使用Freescale DSP 56F8346 作为控制核心。利用该DSP 自带软件Freemaster,通过串口通信输出并观测转速、电流和位置信号。实验条件:母线电压为200V;注入高频电压幅值为44V,频率为1kHz;采用常规id=0 矢量控制方式;由于实际样机未对相电感优化设计,相电感波形欠佳,选择上文分析中n=2,即15°位置精度的位置辨识方法。
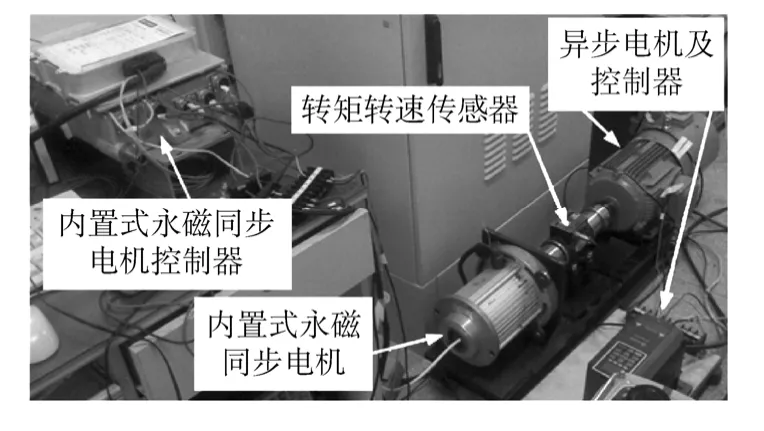
图7 拖动实验平台Fig.7 Dragged experiment platform
4.1 相电感与相电感之差波形
相电感与相电感之差是文中方法的基础,因此给出转速100r/min,空载与额定10N·m 负载运行时样机相电感与相电感差的波形如图8 所示。

图8 转速100r/min,空载和额定转矩10N·m 时相电感与相电感差实验波形Fig.8 Experimental waveforms of phase inductance and phase-inductance-differences of no-load and rated 10N·m load when speed is 100r/min
由图8 可见,由于受电机磁路饱和影响,随着负载增加,相电感整体减小。此外,由于受实际电机磁路局部饱和等影响,电感波形具有一定谐波分量,同时在不同负载下,波形整体有一定的畸变。虽然样机未针对电感作优化设计,但样机电感对称性和凸极性保持一致,保证文中算法的顺利实施。
4.2 稳态性能
为验证所提方法的稳态性能,使用变频器控制异步电机输出10N·m 负载转矩。样机速度环给定转速为100r/min,图9 给出相应的转速、相电流、位置及位置误差波形。
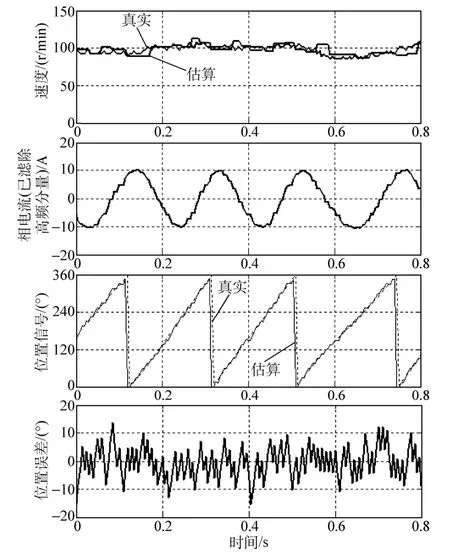
图9 转速100r/min,负载转矩10N·m 时稳态实验波形Fig.9 Steady state experimental waveforms when speed is 100r/min and load torque is 10N·m
由图9 可知,所述方法能够在额定负载下稳定运行,电机相电流(已滤除高频分量)具有良好正弦度。由于受样机本体限制,采用15°位置精度辨识方法,估算位置和实际位置误差约±10°,转速误差约±15r/min。
4.3 动态性能
为验证所提策略的动态性能,图10 给出额定负载10N·m 情况下,样机在速度0 至100r/min 间阶跃运行时的相应转速、相电流、位置及位置误差波形。图11 给出样机转速100r/min,突加突卸额定10N·m 负载时的相应转速、相电流、位置及位置误差波形。
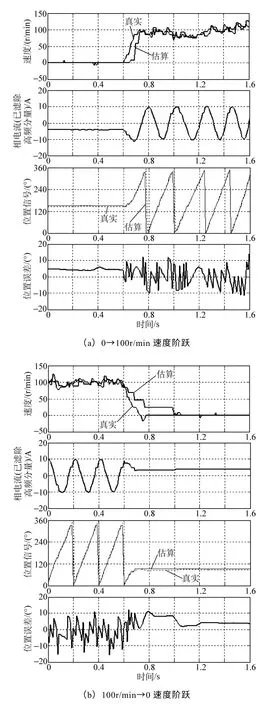
图10 负载转矩10N·m 时速度阶跃实验波形Fig.10 Speed step experimental waveforms with 10N·m load torque
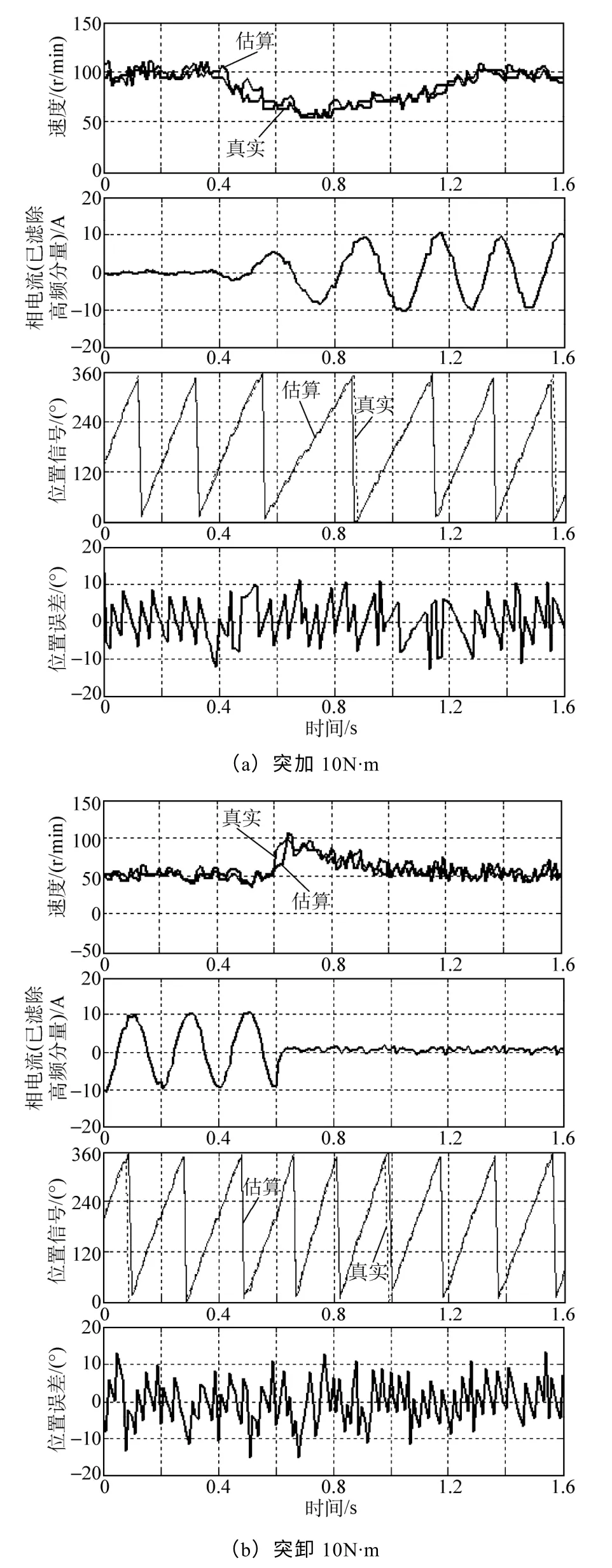
图11 100r/min 时突加突卸额定10N·m 转矩动态实验波形Fig.11 Dynamic state experimental waveforms of loading and unloading rated 10N·m torque when speed is 100r/min
由图10、图11 可知,所述控制方法具有较好的动态性能,能够在额定负载条件下稳定起动,并能够额定负载堵转运行,在突加突卸额定负载转矩时,电机速度能快速恢复,而且在加减速和突加突卸负载运行过程中,估算位置与实际位置保持一致。由于估算速度是根据15°位置间隔时间计算得到,在如图10 中较剧烈升降速运行时,估算速度会有一定延迟,但不会影响电机正常运行。
5 结论
本文首先分析了内置式永磁同步电机的相电感特性,利用相电感差消除相电感中直流分量的不利影响,并在此基础上推导得到电感矢量簇迭代细分规律。根据所得电感矢量簇,利用简单的比较运算,得到一种理论上可无限细分的IPMSM 位置辨识方法,并根据所得位置进行矢量控制,适用于IPMSM低速无位置传感器运行。实验表明,所提 IPMSM无位置控制方法具有以下特点:①具有额定负载运行能力;②具有良好的动静态性能,具有额定扭矩堵转运行能力;③在稳态、加减速和突加突卸负载运行过程中,均能有效可靠地估算转子位置;④估算方法简单可靠,无需坐标变换和闭环追踪算法,易于实现。
[1]唐任远,等.现代永磁电机理论与设计[M].北京:机械工业出版社,1997.
[2]许家群,朱建光,邢伟,等.电动汽车驱动用永磁同步电动机系统效率优化控制研究[J].电工技术学报,2004,19(7):81-86.Xu Jiaqun,Zhu Jianguang,Xing Wei,et al.Study of efficiency optimization control of permanent magnet synchronous motor drives for electric vehicle[J].Transactions of China Electrotechnical Society,2004,19(7):81-86.
[3]赵莉,郭秋鉴.内嵌式永磁同步电动机电感参数辨识[J].微电机,2008,41(10):35-38.Zhao Li,Guo Qiujian.Inductance parameter identification of interior permanent magnet synchronous motor[J].Micromotors,2008,41(10):35-38.
[4]王丽梅,郭庆鼎.基于转子凸极跟踪的永磁同步电机转子位置的自检测方法[J].电工技术学报,2001,16(2):14-19.Wang Limei,Guo Qingding.Rotor position estimation for permanent magnet synchronous motor using saliency-tracking self-sensing method[J].Transactions of China Electrotechnical Society,2001,16(2):14-19.
[5]王高林,张国强,贵献国,等.永磁同步电机无位置传感器混合控制策略[J].中国电机工程学报,2012,32(24):103-111.Wang Gaolin,Zhang Guoqiang,Gui Xianguo,et al.Hybrid sensorless control strategy for permanent magnet synchronous motors[J].Proceedings of the CSEE,2012,32(24):103-111.
[6]Roberto Cárdenas,Rubén Peña,Sensorless Vector control of induction machines for variable-speed wind energy applications[J].IEEE Transactions on Energy Conversion,2004,19(1),196-206.
[7]刘颖,周波,冯瑛,等.基于脉振高频电流注入SPMSM 低速无位置传感器控制[J].电工技术学报,2012,27(7):139-145.Liu Ying,Zhou Bo,Feng Ying,et al.Sensorless control of SPMSM based on high frequency current signal injection in the direct axis at low and zero speed[J].Transactions of China Electrotechnical Society,2012,27(7):139-145.
[8]Ashok B Kulkarni,Mehrdad Ehsani.A novel position sensor elimination technique for the interior permanentmagnet synchronous motor drive[J].IEEE Transactions on Industry Applications,1992,28(1):144-151.
[9]Krause P C.Analysis of electric machinery[M].New York:McGraw-Hill Book Company,1986.
[10]Rahman M A.High efficiency IPM motor drives for hybrid electric vehicles[C].Canadian Conference on Electrical and Computer Engineering(IEEE CCECE 2007),Vancouver,2007.
[11]Foo G,Sayeef S,Rahman M F.Direct torque control of an IPM-synchronous motor drive at very low speed using a sliding-mode stator flux observer[J].IEEE Transactions on Power Electronics,2010,25(4):933-942.
[12]Shinnaka S.A new speed-varying ellipse voltage injection method for sensorless drive of permanentmagnet synchronous motors with pole saliency—new PLL method using high-frequency current component multiplied signal[J].IEEE Transactions on Industry Applications,2008,44(3):777-788.
[13]万山明,吴芳,黄声华.基于高频电压信号注入的永磁同步电机转子初始位置估计[J].中国电机工程学报,2008,28(33):82-87.Wan Shanming,Wu Fang,Huang Shenghua.Initial rotor position estimation of permanent magnet synchronous motor based on high frequency voltage signal injection method[J].Proceedings of the CSEE,2008,28(33):82-87.
[14]Lipo T A.Analysis of synchronous machines[M].Wisconsin:Wisconsin Power Electronics ResearchCentre,2008.
猜你喜欢
上海大中型电机(2021年2期)2021-07-21 03:01:32
防爆电机(2020年6期)2020-12-14 07:16:54
通信电源技术(2018年5期)2018-08-23 01:16:12
光学精密工程(2016年3期)2016-11-07 09:03:49
电测与仪表(2015年16期)2015-04-12 00:44:38
大电机技术(2015年5期)2015-02-27 08:22:28
电测与仪表(2014年13期)2014-04-04 12:04:16
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
汽车电器(2014年8期)2014-02-28 12:14:29
河南科技(2014年14期)2014-02-27 14:12:08
