
一种开关磁阻电机位置信号故障诊断与容错控制方法
2014-11-25 09:34:42胡荣光邓智泉
电工技术学报 2014年7期
胡荣光 邓智泉 蔡 骏 王 骋
(南京航空航天大学自动化学院 南京 210016)
1 引言
开关磁阻电机(Switched Reluctance Motor,SRM)具有结构简单、成本低、控制灵活、调速性能好、容错性能强等优点,吸引了国内外学者的广泛关注,目前已成功应用于航空航天、电动车驱动、家用电器、工业应用等众多领域中[1,2]。
开关磁阻电机工作在同步状态,为了控制电机的转速和转矩,激励相必须与转子位置保持同步关系。驱动系统根据转子位置控制电机运行状态,因此开关磁阻电机的运行基于转子位置的准确检测,转子位置信息是各相开关器件正确逻辑切换的基础[3]。
目前的开关磁阻电机位置信号主要由位置传感器来获取。位置传感器通常和电机本体装配在一起,当电机工作在高温、潮湿、多粉尘等恶劣环境下时,位置传感器容易发生故障。故障后的位置信号影响各相的驱动信号,导致电机不正常运行,系统的可靠性降低。因此,对位置信号故障诊断和容错控制可提高其在高可靠性场合的应用潜力。
开关磁阻电机各相磁路相互独立,且常用的不对称半桥功率变换器实现了各相驱动电路相互隔离,因此与其他电机相比,SRD 具有容错能力强的优点。但是,某些故障仍将对开关磁阻电机的运行造成不利的影响,需要进行诊断和容错控制。文献[4,5]总结了开关磁阻电机系统的电气故障类型,即功率变换器、电机绕组、供电电源、位置传感器故障。文献[6-14]对电机系统的故障诊断和容错控制进行了大量研究。文献[15]简要分析了位置传感器的故障原因和影响,但没有研究故障的诊断方法。文献[16]分析了永磁双凸极电机中霍尔位置信号故障,并给出了各个故障对电机运行的影响。文献[17]提出了增加2 个位置传感器来实现8/6 开关磁阻电机的容错控制,但未研究位置信号的故障诊断和容错控制。文献[18]针对永磁双凸极电机位置信号的各种故障情况,系统提出了基于位置信号边沿或电平变化的诊断策略。文献[19]针对开关磁阻电机位置信号的故障,提出了通过检测各相位置信号双边沿的触发顺序和相邻触发边沿之间的角度差实现故障检测,其中需要利用转速计算边沿的角度差来识别故障类型。文献[18,19]的诊断方法均利用瞬时转速,必须假设电机转速在位置信号周期内不变,若电机运行在加速或减速情况下,由于转速的变化,这两种方法可能造成故障误诊断;并且,这两种方法均基于位置信号边沿交替变化顺序,无法诊断出两相位置信号同时故障,且当一个位置信号故障后,对剩下的两个位置信号故障诊断时需要重新考虑边沿顺序,控制策略复杂。文献[20]考虑电机运行在加速状态下,分析了文献[18]中的诊断方法,证明了这一类需要利用相邻边沿转速不变条件的诊断方法对位置信号的故障来说可靠性差,但却没有提出能够解决的办法。
本文针对开关磁阻电机加减速频繁时,不能利用转速恒定这一假设,提出了基于边沿时刻预测的位置信号故障诊断方法,并分析了该方法对于其他电机位置信号故障诊断的通用性。该方法假设位置信号周期内电机运行的角加速度恒定,适用于电机加速或减速运行情况,并且各相位置信号的故障诊断相互独立,能够诊断多相位置信号同时故障。本文最后对电机运行在匀速以及加减速状态时的位置信号故障诊断进行了Matlab/Simulink 仿真,并通过故障模拟实验,验证了该方法的正确性和可靠性。
2 位置信号故障概述
2.1 开关磁阻电机位置信号概述
开关磁阻电机位置传感器主要有电磁式、光电式、磁敏式等,其中光电式位置传感器的应用最为广泛。光电式位置传感器一般由转盘、光电发射器和接收传感器构成。当电机转动时,固定在转子轴上的齿盘是否遮住光线将引起光敏元件信号的高低电平变化,产生方波形式的位置信号。
12/8 结构开关磁阻电机的光电式位置传感器安装如图1 所示,光电传感器P、Q、R 固定在定子上相隔60°安装,转盘上有8 个齿和8 个槽,齿和槽等宽,所占角度均为22.5°。图2 所示为位置信号与相电感的对应关系,每一个位置信号的边沿均能确定一次三相的位置角。由于一个位置信号相邻两个边沿的间隔角度为22.5°,只要通过DSP 边沿捕获得到这两个边沿之间的计数值,就能计算出电机每转一度对应DSP 中定时器的计数值AngleRpm,然后即可计算出电机转速和转子实时角度。为了增加准确性,通常将三个位置信号分别计数得出的AngleRpm_i(i=1,2,3 对应每个位置信号的序号)取平均,再计算出相对较精确的转速和转子位置角。因此,如果把正常位置信号误诊断为故障信号,则将降低转速和转子位置角的计算精度,是不可取的。
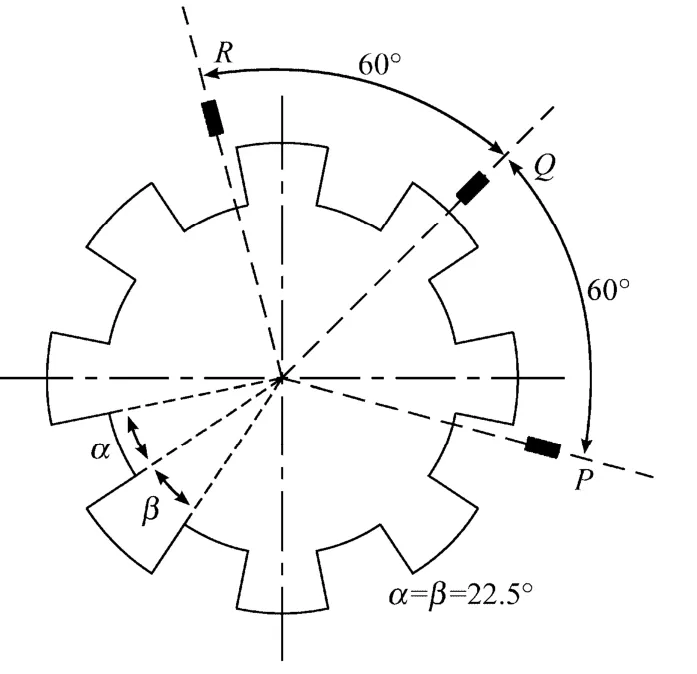
图1 开关磁阻电机位置传感器安装图Fig.1 Installation of position sensors for SRM
如果某个位置传感器出现故障,位置信号不再出现边沿,该信号的AngleRpm_i 不再发生变化,导致三个位置信号取平均后的 AngleRpm 不再正确,电机转速和转子位置角计算有误,驱动信号不正确,影响电机运行。如果及时诊断出位置信号故障,只对剩下正常位置信号的AngleRpm_i 取平均,就能避免产生错误的AngleRpm,产生正常驱动信号,达到位置信号故障后电机容错运行的目的。
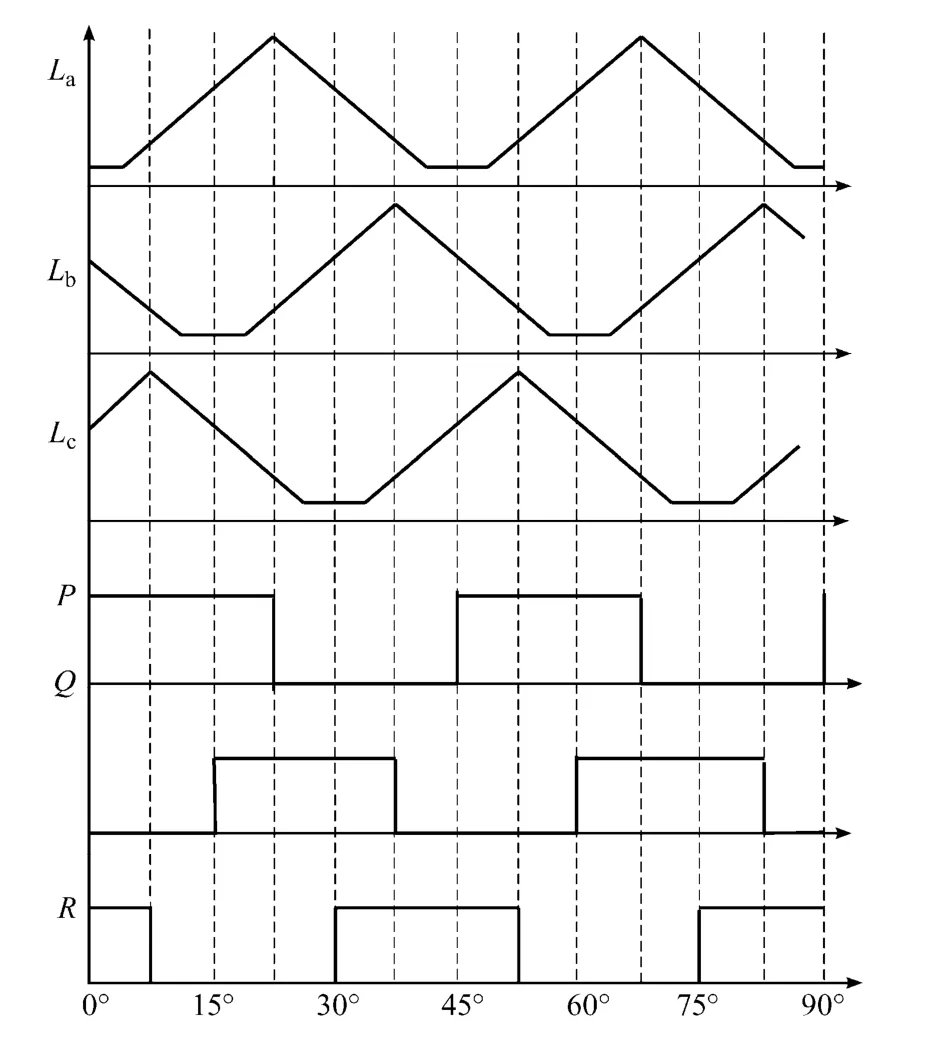
图2 位置信号与三相电感对应关系Fig.2 Corresponding relationship between position signal and the phase inductance
2.2 位置信号故障类型
开关磁阻电机运行时,由于碰撞、灰尘或潮湿环境的影响,位置传感器易发生临时性或永久性故障。故障后,位置信号将保持低电平(见图3b、3e)或高电平状态(见图3c、3d)。因此,可将位置信号故障分为低电平故障和高电平故障。
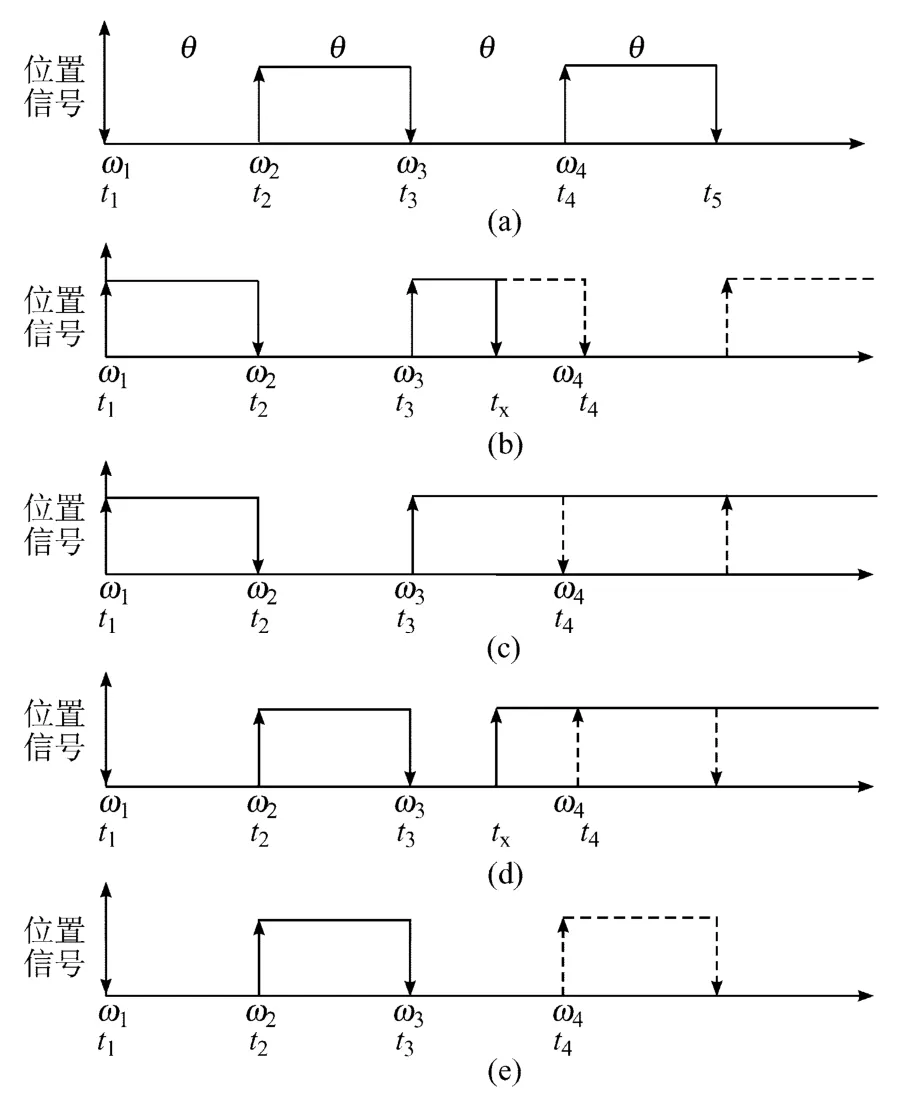
图3 位置信号故障表现形式Fig.3 Expressions of faulted position signals
根据故障发生的时刻不同,低电平故障和高电平故障发生后的位置信号有如下两种:①若故障后电平与故障前的电平不一致,将产生错误边沿;②若故障后的电平与故障前的电平一致,那么本该出现的边沿消失。因此,只需检测位置信号的边沿是否正常,即是否提前出现或在正常出现时刻消失,就可诊断两种故障。
若位置信号边沿提前出现,将导致对转子角度的错误定位,可能立即在这错误的位置(某相电感下降区)驱动该相而使电流过大[19],需要及时进行诊断,避免严重的后果。因此,位置信号的故障诊断方法需要具有较好的快速性,即必须能够在故障瞬间诊断出故障,然后利用剩下正常的位置信号获取AngleRpm;并且,位置信号的故障诊断方法需具有正确性,不能将正常的位置信号误判为故障信号。
3 位置信号故障诊断与容错控制
3.1 位置信号的故障诊断方法
图3a 给出了正常的位置信号波形,对相邻4个边沿进行分析,由于位置信号具有周期性,因此,第一个边沿为上升沿或者下降沿对分析的结果没有影响,下面说明位置信号故障诊断方法。
图3a 中t1、t2、t3、t4分别为4 个边沿时刻,ω1、ω2、ω3、ω4分别为4 个边沿时刻的瞬时角速度,θ为连续两个边沿间转子转过的角度。因为位置传感器的每个齿槽各占22.5°,所以连续两个边沿间转子转过的角度θ 固定为22.5°。
通常情况下,电机转速较高,可假设相邻边沿转子的角速度恒定,因此,在利用三相位置信号边沿顺序出现的诊断方法中,可以利用前一个边沿的角速度来计算下一个边沿应该出现的时刻,或者利用前一个边沿的角速度来计算前一个边沿与下一个边沿之间的角度,来区分难以判别的故障情况[18,19]。但是当电机运行在加速或减速的情况下,这种假设不成立,因此,这类诊断方法存在局限,需要进行改进。
由于两个位置信号周期的时间很短,可以认为这两个周期内的电机角加速度α 恒定。电机加速运行时,α>0,连续两个边沿的间隔时间将缩短,即t2-t1>t3-t2>t4-t3;电机减速运行时,α<0,连续两个边沿的间隔时间将延长,即t2-t1<t3-t2<t4-t3;电机匀速运行时,α=0,连续两个边沿的间隔时间不变,即t2-t1=t3-t2=t4-t3。实际操作中,DSP 能够准确测量各个边沿出现的时刻,因此可准确地计算出连续两个边沿之间的间隔。令Δt1=t2-t1,Δt2=t3-t2,Δt3=t4-t3,若加速度恒定,则连续通过三个相同角度所需的时间Δt1、Δt2和Δt3存在一定的关系。下面对这个关系进行理论推导。
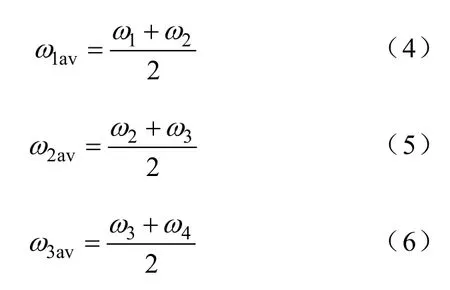
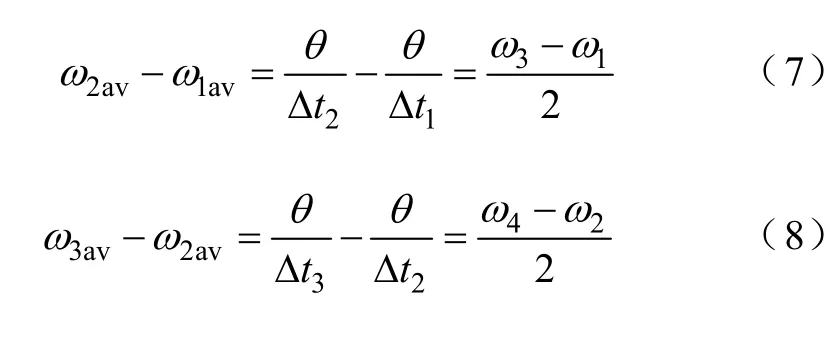
如图3a 所示,第一个边沿与第二个边沿之间的平均角速度为ω1av,第二个边沿与第三个边沿之间的平均角速度为ω2av,第三个边沿与第四个边沿之间的平均角速度为ω3av,平均角速度等于相邻边沿角度除以通过这段角度的时间,即

当角加速度恒定时,平均角速度等于初速度和末速度的平均值,即
综合以上六式,可得式(2)-式(1)=式(5)-式(4),式(3)-式(2)=式(6)-式(5),即
在恒加速运动中,角速度ω1、ω3与时间、角加速度的关系为

角速度ω2、ω4与时间和角加速度的关系为

将式(9)代入式(7)中,式(10)代入式(8)中,消除各个时刻的角速度ω1、ω2、ω3、ω4,得

其中θ 是固定的,为22.5°,但是角加速度α在不同的运行阶段是变化的。因此,需要将角加速度α 消去。当角加速度α≠0 时,式(11)除以式(12),得到
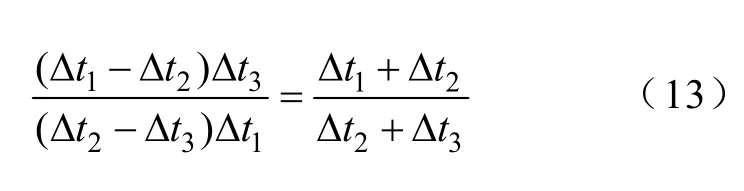
由式(13)可以看出,若已知了Δt1和Δt2,就可以计算出Δt3。为求出Δt3,对式(13)变形即可得到以Δt3为未知量,Δt1和Δt2为已知量的一元二次方程
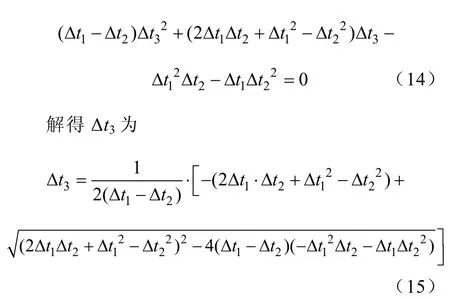
当第二个边沿出现时,可以得到Δt1,当第三个边沿出现时,可以得到Δt2,这时若Δt1≠Δt2,则说明加速度α≠0,可以根据Δt1和Δt2,利用式(15)计算出第四个边沿与第三个边沿之间的时间间隔Δt3。若Δt1=Δt2,则角加速度α=0,这时Δt3=Δt1=Δt2,同样也可以得到Δt3。
以当前边沿为第三个边沿,记录当前边沿以及前两个边沿时刻,就能够利用上述方法预测出下一个边沿即第四个边沿应该出现的时刻,即图 3a中t4。
若误差ξ≤5%,可认为这个边沿出现的时刻是正确的,即没有发生故障;若误差ξ>5%,可认为这个边沿出现时刻不正确,即边沿提前出现,可判断传感器故障。
若发生了如图3c 的高电平故障2 和如图3e 所示的低电平故障2,即边沿消失故障,由于没有下一个边沿出现,因此检测不到tx。理论计算出下一个边沿出现的时刻为t3+Δt3,这个时刻后电平将发生改变。考虑实际误差,令 t4'=(1+5%)·Δt3+t3,若 t4'时位置信号电平仍不改变,说明未出现边沿,可判断传感器故障。
上述诊断过程的流程图如图4 所示。
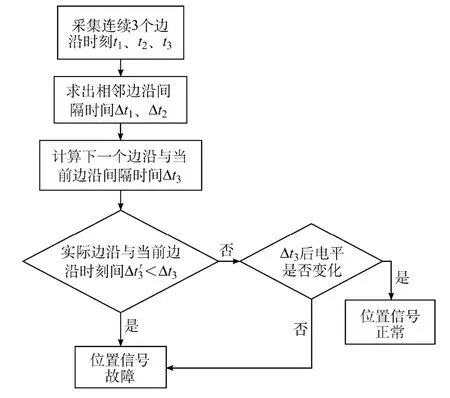
图4 故障诊断流程图Fig.4 Process of fault diagnose
从上述分析可以看出,本文提出的基于加速度恒定的位置信号故障诊断方法只需利用自身位置信号,因此,三相位置信号的故障诊断相互独立,所以该方法也适用于两相或多相位置信号同时发生故障的情况。
3.2 诊断方法的通用性
上述诊断方法的推导利用了开关磁阻电机齿槽等宽转盘的光电传感器信号。然而永磁同步电机、无刷直流电机或者开关磁阻电机的某些位置传感器,其齿槽并不等宽,而是成一定的比例关系。图5 为齿宽为槽宽k 倍的转盘及其对应的位置信号,其中槽宽为θ,则齿宽为kθ。
若要诊断下一个边沿为下降沿,则令第一个边沿为上升沿,式(2)改为
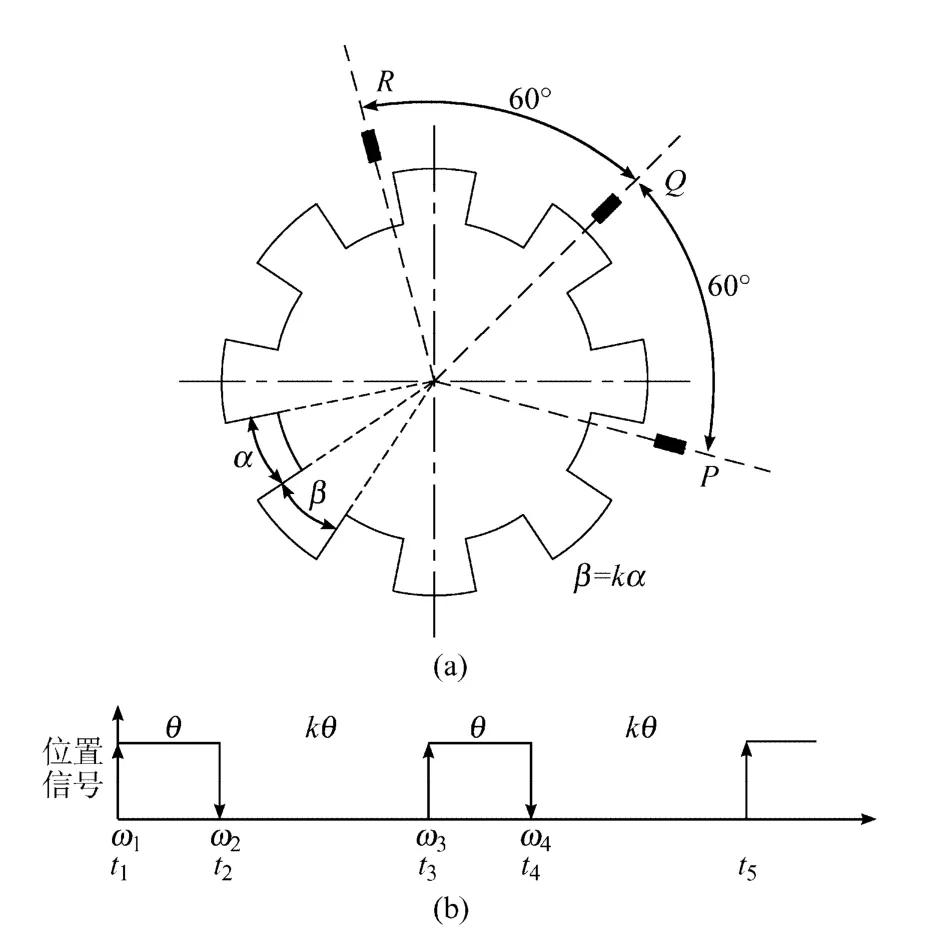
图5 齿槽不等宽的位置传感器安装图与位置信号Fig.5 Installation and position signal of position sensor with unequal tooth and slot width
利用前述方法可得将要出现的下降沿与当前上升沿之间时间间隔
若要诊断的下一个边沿为上升沿,则第一个边沿为下降沿,式(1)和式(3)分别改为

得出将要出现的上升沿与当前下降沿之间的时间间隔为
得到Δt3后,诊断方法与2.1 节中所述相同。因此,对于其他矩形波形式位置信号的故障,该方法均能及时诊断,具有通用性强的优点。
3.3 容错控制
当三个位置信号都正常时,DSP 通过检测位置信号的边沿进入中断程序。根据位置传感器实际装配位置,每个位置信号的边沿均能对应一个转子位置角(0~45°),因此可以在边沿中断中定位六个角度。
当一个位置信号发生故障时,程序中每一度对应的计数值AngleRpm 应立即改变成剩下的两个正常位置信号AngleRpm_i 的平均值,以保证角度计算的正确性。同时,由于故障位置信号不再有边沿变化,不能对角度进行定位,使得一个周期内的定位角度减少为4 个,并不影响程序中角度的计算。因此实现了容错控制。
当两个位置信号发生故障时,AngleRpm 应直接变成剩下正常位置信号的AngleRpm_i 来实时计算角度,且一个周期内的定位角度减少为2 个。虽然这样会降低角度计算的精确度,但对开关磁阻电机的运行影响不大,也可以实现容错控制。
当三个位置信号都发生故障时,无法再通过硬件获得位置信号,上述容错方法不能实现,需要通过无位置传感器技术来控制电机运行,不在本文讨论范围之内。
4 位置信号故障恢复诊断
当位置信号从电平保持不变的故障状态恢复至电平高低变化的正常状态时,根据之前的故障类型,也可以将故障恢复分成两种,即低电平故障恢复(见图6c、6d,电平一直为低到恢复正常)和高电平故障恢复(见图6a、6b,电平一直为高到恢复正常)。在不同的时刻恢复故障可能会产生不正常的边沿,为了防止错误的边沿错误定位转子角度,同时影响转速计算,此时须延时一段时间才能更改故障状态,恢复到正常运行时的控制算法。

图6 位置信号故障恢复Fig.6 Recovery of faulted position signals
如图6a 所示,位置信号为高电平故障,但是在信号本该为低电平时,传感器恢复正常,电平由高变低,产生了一个错误的下降沿。图6c 中位置信号故障恢复时也产生了一个错误边沿。由于此时仍然认为位置信号是故障的,因此不会错误定位转子角度,也不会影响转速的计算。
若以这个错误边沿为第一个边沿,令其时刻为t1,第二个边沿时刻为t2,第三个沿时刻为t3,根据这三个边沿出现的时刻预测出的下一个边沿时刻为t4。由于第一个边沿到第二个边沿之间的距离θ0≠θ,因此实际下一个边沿时刻tx≠t4,仍然认为传感器为故障状态。若考虑出现时刻分别为t2、t3和t4的边沿,预测的下一个边沿时刻t5与实际下一个边沿时刻 tx' 相差不大,可判断故障已经恢复。因此,若故障恢复时产生了错误的边沿,在这个错误边沿后第五个边沿出现时诊断出故障恢复正常,开始定位角度,恢复为正常运行时的控制算法。
如图6b 所示,若高电平故障恢复在高电平区间内,则恢复时刻不会产生错误的下降沿,而是在正常的下降沿时刻出现正确的下降沿。图6d 中位置信号故障恢复时出现的第一个边沿也是正确的。以该边沿为第一个边沿考虑连续三个边沿,预测的下一个边沿出现的时刻t4与实际出现时刻tx基本相同,即可判断故障已经恢复。因此,若故障恢复时不产生错误边沿,则在第一个边沿后第四个边沿出现时诊断出故障恢复正常。
综上所述,即使位置信号有了高低电平的变化,但是如果边沿不是在正常时刻出现,也不会诊断其恢复正常。本方法将延时一两个周期诊断出故障恢复,保证位置信号的正确性,
5 仿真与实验
5.1 仿真
对于该算法的实现,首先通过Matlab/Simulink模型对电机加速、减速和匀速运行时的位置信号进行诊断。
图7 为位置信号在电机加速、减速以及匀速运行条件下发生故障及故障恢复时的仿真结果,电机经PI 转速闭环控制,加速运动到给定转速4 000r/min后,下调给定转速为2 000r/min,电机减速运行,位置信号由稀疏到密集再逐渐稀疏。图中故障标志信号为0 时表示位置信号正常,为1 时表示位置信号故障。故障信号标志在前两个位置信号周期表现为不正常的01 变化,这是因为电机起动时,必须等到两个位置信号周期之后才能获得相邻四个边沿出现的时刻t1,t2,t3,t4,因此前两个周期不能够对位置信号故障进行正常诊断。但是开关磁阻电机实际起动时通常认为位置传感器均正常,并且采用的是位置电平逻辑来直接控制驱动信号的自起动方法,因此不会限制该方法在实际中的应用。从图中可以看出,在位置信号发生故障产生错误下降沿时,该下降沿出现的时刻与利用前三个边沿时刻预测得到的边沿时刻误差ξ 较大,立即诊断出该边沿不正常,判断传感器故障。故障恢复没有产生错误边沿时,预测得到的边沿时刻与第四个边沿时刻误差ξ在正常范围内,可判断故障恢复。由仿真结果可得,不管电机处于加速、减速或匀速运行时,位置信号故障诊断均不受影响,验证了该方法具有可靠性强,使用范围广的优点。
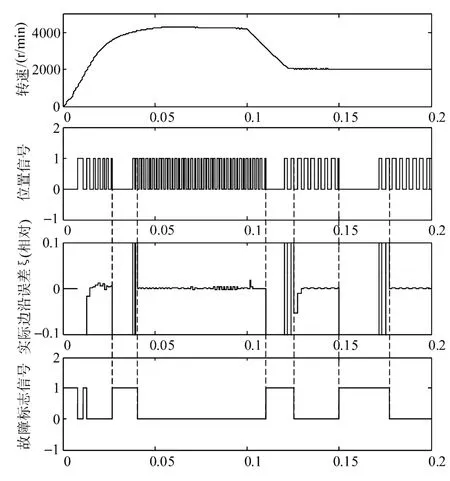
图7 各种运行条件下位置信号故障诊断仿真波形Fig.7 Simulation waveforms of fault diagnose of position signals in different oprerating conditions
5.2 实验验证
实验样机采用 12/8 结构开关磁阻电机及不对称半桥功率变换器,并采用角度位置控制方式。
图8 为A 相位置信号发生故障后A 相上管驱动信号和计算转速的变化情况。可以看出,位置信号正常时,A 相上管驱动信号为正常的单脉冲形式,而当位置信号故障后,转速计算错误,使得驱动信号发生紊乱,影响到电机的运行性能。
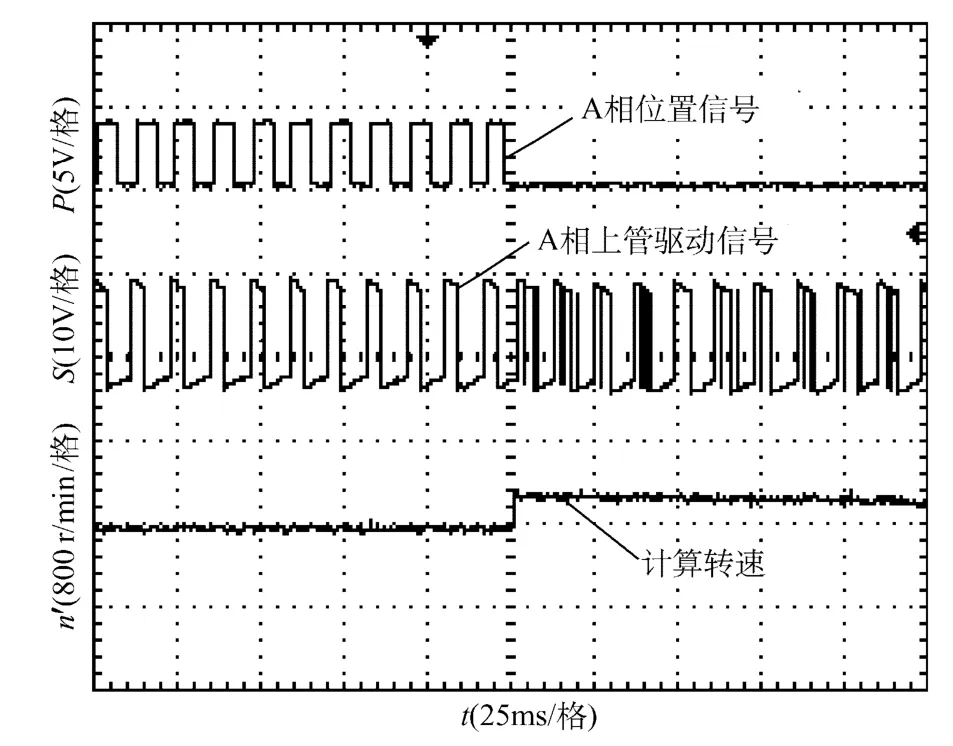
图8 A 相位置信号故障后的驱动信号Fig.8 Driving signal of phase A after the fault of position signal
图9a、9b 分别为电机匀速转动时有错误边沿产生时的故障波形和不产生错误边沿时的故障波形,其中故障标志信号为1 时表示故障,为0 时表示正常。当位置信号发生故障并产生错误边沿时,即tx并不是t3边沿的后一个边沿应该出现的时刻,该方法能在错误边沿时刻立即诊断出故障,验证了具有良好的快速性。当位置信号故障导致边沿消失时,该方法能在t3边沿的后一个边沿应该出现的时刻 t4'时刻诊断出故障,因此能够诊断出所有类型的位置信号故障。同时,由于采用故障容错控制,故障前后的驱动信号没有发生变化,因此不会对电机运行性能产生影响。

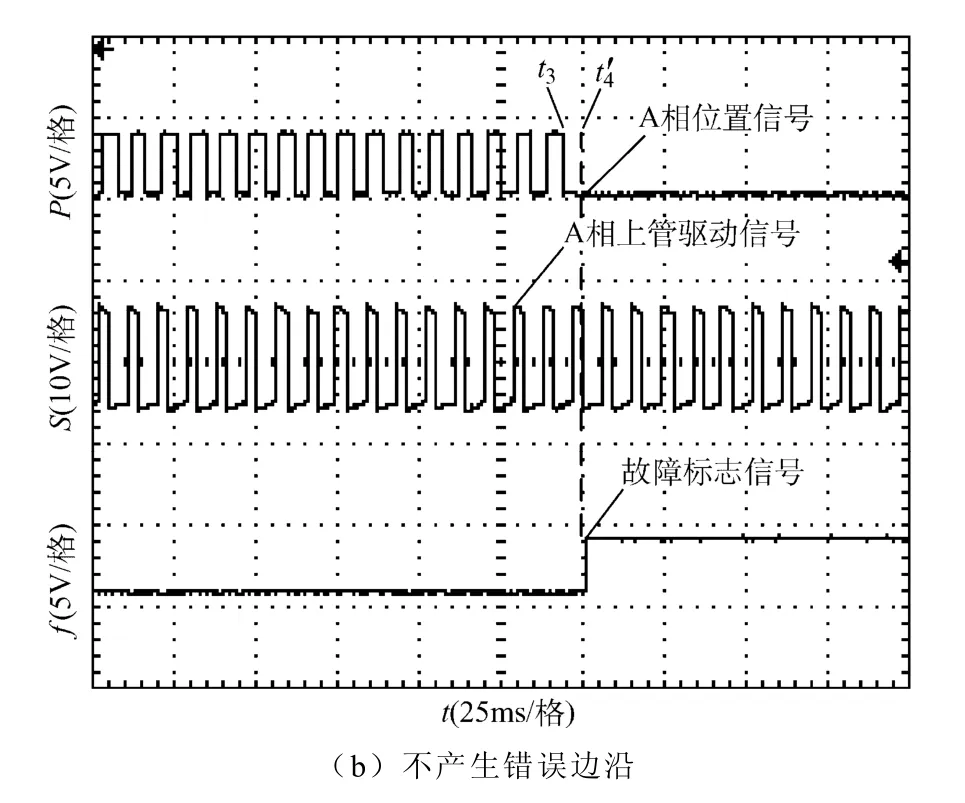
图9 两种位置信号故障类型的诊断Fig.9 Diagnose of two kinds of fault position signal
图10 为电机在各种运行条件下时位置信号发生故障和故障恢复的诊断情况。与仿真一致,实验时让电机从静止加速到4000r/min,然后再减速运行至2000r/min 后保持匀速运行。从图中可以看出不管电机处于加速、减速还是匀速运行时,该方法都能准确地诊断出位置信号故障以及故障恢复,从而验证了该方法能适用于电机各种变速运行条件,适用范围较广。
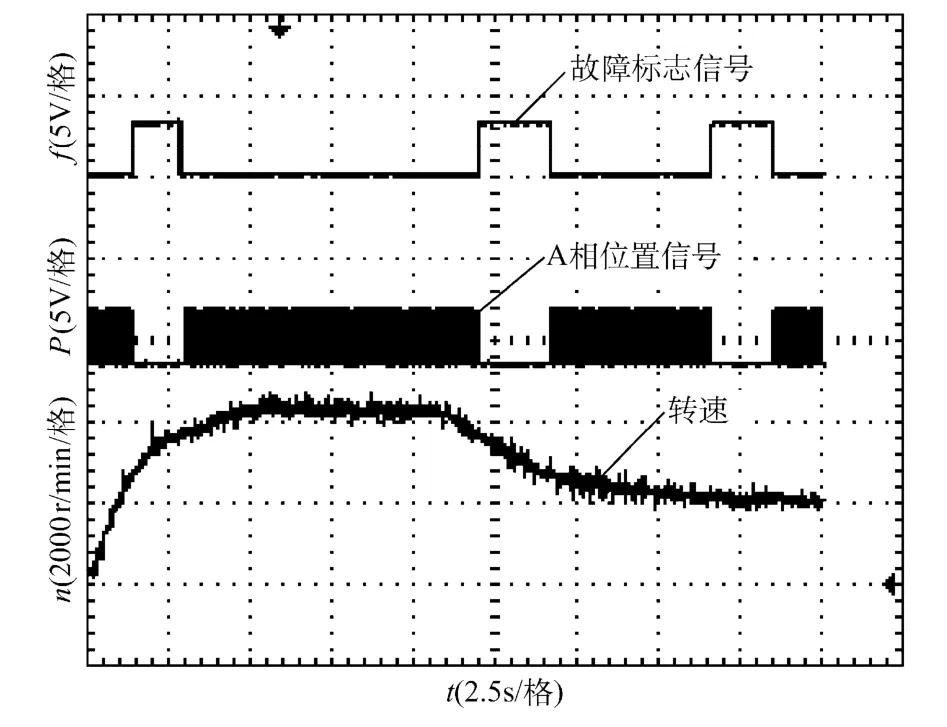
图10 各种运行条件下的位置信号故障诊断Fig.10 Diagnose of position signal in different operating conditions
图11a、11b 分别为有错误边沿产生时的故障恢复波形和不产生错误边沿时的故障恢复波形。当位置信号故障恢复时刻产生错误边沿时,将在这个错误边沿后的第五个边沿诊断出故障恢复;而当位置信号故障恢复时刻不产生错误边沿时,将在这个错误边沿后的第四个边沿诊断出故障恢复。因此验证了该方法能够延时两个周期诊断出位置信号故障恢复,实现平稳切换,具有较好的可靠性。
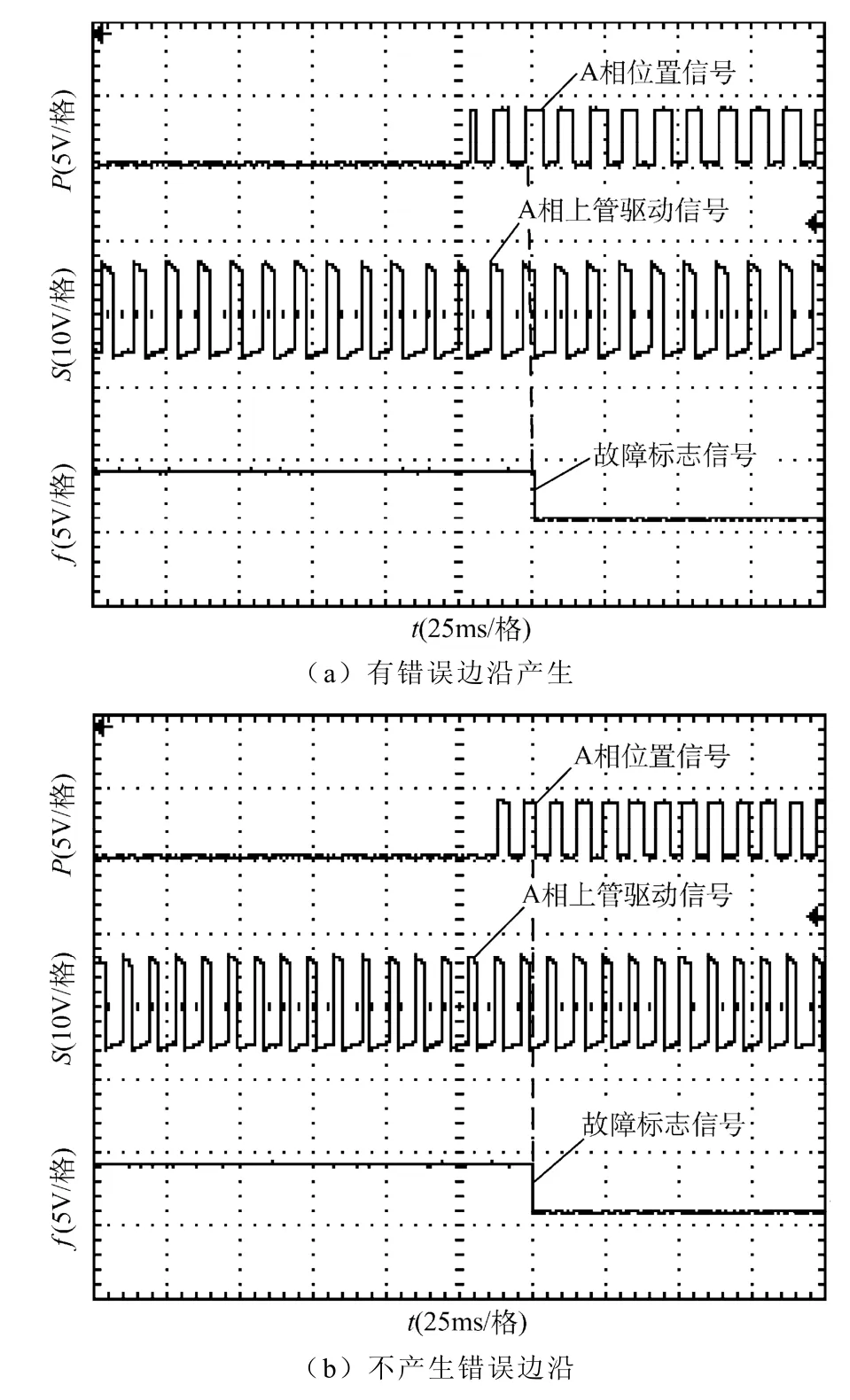
图11 两种位置信号恢复类型的诊断Fig.11 Diagnose of two kinds of recoverd position signal
图12 为两相位置信号,以及在短时间内均发生故障时的诊断情况。从图中看出,A 相位置信号故障后并不影响B 相位置信号故障的诊断,验证了该方法将每相的位置信号故障诊断独立开来,克服某些其他方法的缺陷。
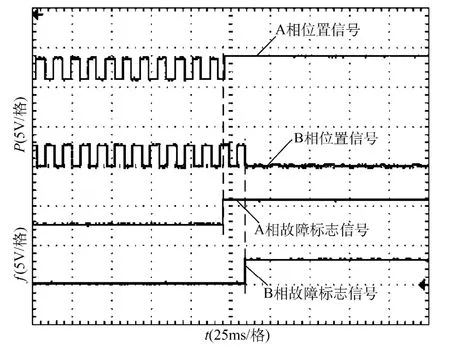
图12 两相位置信号故障诊断Fig.12 Diagnose of two phase fault position signals
6 结论
本文通过对位置信号连续边沿出现时刻的分析,提出了基于边沿时刻预测的位置信号故障诊断方法。该方法只需利用自身位置信号,能够在开关磁阻电机各种运行状态下准确诊断出位置信号故障和故障恢复,同时,对于其他电机矩形波式的位置信号故障诊断也同样适用。因此,该方法具有较好的可靠性和通用性,为电机系统在高可靠性应用场合的进一步应用提供借鉴。
[1]Cloyd J S.A status of the united states air force’s more electric aircraft initiative[J].IEEE Aerospace and Electronic Systems Magazine,1998,13(4):17-22.
[2]Fahimi B,Emadi A,Sepe R B Jr.A switched reluctance machine-based starter/alternator for more electric cars[J].IEEE Transactions on Energy Conversion,2004,19(1):116-124.
[3]Becerra R C,Ehsani M.Commutation of SR motors[J].IEEE Transactions on Power Electronics,1993,8(3):257-262.
[4]Chen Hao,Zhang Chao.Analysis of electrical faults for switched reluctance motor driver[C].Proceedings of the 3" World Congress on Intelligent Control and Automation,2000,1:666-669.
[5]Gopalakrishnan S,Omekanda A M,Lequesne B.Classification and remediation of electrical faults in the switched reluctance drive[J].IEEE Transactions on Industry Applications,2006,42(2):479-486.
[6]周强,严加根,刘闯,等.航空开关磁阻发电机双通道容错性能研究[J].航空学报,2007,28(5):1146-1152.Zhou Qiang,Yan Jiagen,Liu Chuang,et al.Research on fault-tolerant performance of dual-channel of aviation switched reluctance generator[J].Acta Aeronautica Et Astronautica Sinica,2007,28(5):1146-1152.
[7]Chen Xiaoyuan,Deng Zhiquan,Peng Jingjing.Fault tolerant switched reluctance machine for fuel pump drive in aircraft[C].The 4th IEEE Conference on Industrial Electronics and Applications,2009,1:2340-2344.
[8]Nandi S,Toliyat H A,Li Xiaodong.Condition monitoring and fault diagnosis of electrical motors-a review[J].IEEE Transactions on Energy Conversion,2005,20(4):719-729.
[9]Filippetti F,Franceschini G,Tassoni C,et al.Recent developments of induction motor drives fault diagnosis using AI techniques[J].IEEE Transactions on Industrial Electronics,2000,47(5):994-1004.
[10]Yang B S,Han T,Yin Z J.Fault diagnosis system of induction motors using feature extraction,feature selection and classification algorithm[J].JSME International Journal,Series C,2006,49(3):734-741.
[11]Mir S,Islam M S,Sebastian T,et al.Fault-tolerant switched reluctance motor drive using adaptive fuzzy logic controller[J].IEEE Transactions on Power Electronics,2004,19(2):289-295.
[12]姜建国,苏鹏声,邱阿端,等.电机故障特征提取方法二则[J].中国电机工程学报,1992,12(5):68-72.Jiang Jianguo,Su Pengsheng,Qiu Aduan,et al.Two extraction approaches of fault signature for electric machines[J].Proceedings of the CSEE,1992,12(5):68-72.
[13]董建园,段志善,熊万里.异步电机定子绕组故障分析及其诊断方法[J].中国电机工程学报,1999,19(3):26-30.Dong Jianyuan,Duan Zhishan,Xiong Wanli.Researching on the stator windings faults of asynchronous motor and its diagnostic method[J].Proceedings of the CSEE,1999,19(3):26-30.
[14]卢胜利,陈昊,曾辉,等.开关磁阻电机中功率变换器故障在线诊断方法[J].中国电机工程学报,2010,30(3):63-70.Lu Shengli,Chen Hao,Zeng Hui,et al.On-line fault diagnosis method of power converter for switched reluctance motor[J].Proceedings of the CSEE,2010,30(3):63-70.
[15]刘震,林辉,司利云.开关磁阻发电系统的故障分析及仿真[J].电力系统及其自动化学报,2005,17(5):7-11.Liu Zhen,Lin Hui,Si Liyun.Fault analysis and simulation for the switched reluctance generator system[J].Proceeding of the CSU-EPSA,2005,17(5):7-11.
[16]秦海鸿,赵朝会,王惠贞,等.永磁双凸极电机中常见故障的机理研究[J].南京航空航天大学学报,2006,38(3):292-297.Qin Haihong,Zhao Chaohui,Wang Huizhen,et al.Mechanisms of possible failures in doubly salient permanent magnet motor[J].Journal of Nanjing University of Aeronautics &Astronautics,2006,38(3):292-297.
[17]Chen Hao,Meng Xianjun,Xiao Fang,et al.Fault tolerant control for switched reluctance motor drive[C].IEEE 28th Annual Conference of the Industrial Electronics Society,2002:1050-1054.
[18]马长山,周波.双凸极电机位置信号的故障诊断与容错控制[J].中国电机工程学报,2008,28(18):73-78.Ma Changshan,Zhou Bo.Fault diagnosis and faulttolerant control of position signal for doubly salient motor[J].Proceedings of the CSEE,2008,28(18):73-78.
[19]许培林,邓智泉,陈小元,等.开关磁阻电机位置信号的故障诊断与容错控制[J].中国电机工程学报,2011,31(33):123-130.Xu Peilin,Deng Zhiquan,Chen Xiaoyuan,et al.Fault diagnosis and fault-tolerant control of position signals for switched reluctance motors[J].Proceedings of the CSEE,2011,31(33) :123-130.
[20]卢胜利.开关磁阻电机系统的故障诊断方法研究[D].徐州:中国矿业大学,2010.
猜你喜欢
环球人物(2022年4期)2022-02-22 22:05:06
小资CHIC!ELEGANCE(2021年32期)2021-09-18 06:17:14
防爆电机(2021年4期)2021-07-28 07:42:46
电子设计工程(2017年20期)2017-02-10 03:40:05
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28 07:43:58
爆笑show(2015年4期)2015-06-24 01:55:12
电机与控制应用(2015年1期)2015-03-01 03:49:08
小学阅读指南·高年级版(2014年2期)2014-05-27 05:29:32
振动、测试与诊断(2014年5期)2014-03-01 01:14:21
机械与电子(2014年1期)2014-02-28 02:07:31
