
道路照明的色度学参数测量方法
2014-11-18 13:17刘勋智
灯与照明 2014年4期
刘勋智
(泸州市路灯管理处,四川 泸州 646000)
0 引言
道路照明的目的是为行人和车辆驾驶提供良好的视觉环境,照明质量与交通运行、安全以及环境美化息息相关。道路照明质量的评价指标主要有照度、照度均匀性、亮度、亮度均匀性等。随着社会的发展,人们对日常生活、工作、出行的要求更高。就道路照明而言,人们更希望有良好的显色指数和色温指数等色度学参数,使日常出行更加安全、舒适、快捷。文章结合国家有关标准,介绍了以道路照明的显色指数、色温指数等色度学参数进行现场测量的方法,探究道路照明中距路灯光源不同位置的显色指数与色温的差异性,并介绍了一种新的自动检测道路路灯色度学参数的方案,为道路照明的色度学参数测量提出了全新的检测方案,使道路照明的色度学参数现场测量更便捷、安全。
1 光谱仪的介绍
1.1 光谱仪的构造
光谱仪用于测定辐射源的光谱分布,能同时建立目标或背景的光强度、光谱特性,也称为光谱辐射计或光谱分析仪,是对道路照明的显色指数、色温指数等色度学参数进行现场检测的主要仪器。该仪器是以光电倍增管等光探测器测量谱线不同波长位置光强度的装置。其构造由一个入射狭缝,一个色散系统,一个成像系统和一个或多个出射狭缝组成。以色散元件将辐射源的电磁辐射分离出所需要的波长或波长区域,并在选定的波长上进行光强度测定。
图1 为光栅光谱仪的简单结构。光源发出的光通过狭缝后,近似于点光源发射出光线,由准直面镜将光线变成平行光,再由平面光栅将各波长的光线分开,光线经过光栅色散后由聚焦面镜将同一波长的光聚集在一起,由线型CCD 等检测器件收集信号并进行后期电路分析计算,从而得到光源的光谱信息。

图1 光栅光谱仪器结构
1.2 光谱仪主要技术参数
1.2.1 光谱范围
光谱范围是光谱仪所能采集分析的光源的波长范围,此参量决定了光谱仪的应用范围。
1.2.2 色散率
色散率表示光谱仪把不同波长的光分散开的能力,与光谱仪色散系统的优劣有关。
1.2.3 带宽
光谱仪把有复合光照明的狭缝经过分光系统而变为若干个单色的狭缝象,这单色的狭缝象即为谱线,它的空间宽度δL(线色散)所对应的δλ(光谱宽度)即光谱带宽。光谱带宽表示了光谱仪分辨光谱的能力,光谱带宽越窄,则意味着仪器的分辨力越高。
1.3 典型产品介绍
以丰登电子仪器公司生产的YCKW-1 微型光谱仪为例,介绍其主要技术性能和技术参数。
1.3.1 特点
(1)高光学分析度4.2~5 nmFWHM;
(2)超小体积;
(3)低设置成本;
(4)程式设计微控制器;
(5)可同时连接256 台光谱仪。
1.3.2 主要技术参数
(1)光谱解析度:4.2~5 nmFWHM;
(2)波长范围:380~780 nm;
(3)杂散光:0.3%;
(4)光谱误差值:0.12%;
(5)积分时间1 ms~24 s。
1.3.3 仪器外形图
微型光谱仪外形图见图2。

图2 微型光谱仪
2 道路照明色温与显色指数测量
2.1 测量地段的选择和布点方法
根据GB/T 5700—2008 照明测量的方法以及GB/T 7922—2008 照明光源颜色的测量方法的要求。
仔细分析非中心卡方分布的概率密度函数(Probability Density Function,PDF)可知,其在自由度大于2时总是存在一个最大值,即随机变量存在一个出现概率最大的值,这个值在所有的值中出现频次最高.因此,除了使用统计分布的期望来估计未知项以外,还可以利用这个出现概率最大的值来估计该未知项,此时的更新半径可以由下式计算得到:
(1)测量地段的选择:最好选择在灯具的间距、高度、悬挑、仰角和光源的一致性等方面能代表被测路段的典型路段。
(2)布点方法:现场的色温和显色指数测量,每个场地测量点的数目不应少于9 个,然后求其算数平均值作为该被测照明现场的色温和显色指数。
为了使数据更加准确,减少测量时造成的误差,把道路同一侧三个灯杆间的一半路段作为测量路段,并分成若干个大小相等的矩形网格,把测点设置在每个矩形网格的四角,图3 为布点时的测点布置图。

图3 测点布置图
这样每个网格的边长≤2 m,使得测量点的数量多于测量要求,得到的整体数据会更准确。
2.2 道路现场的色温和显色指数计算
2.2.1 平均色温的计算
按照GB/T 7922—2008 照明光源颜色测量方法的要求,路面平均色温按式(1)计算。

式中:Tav——路面的平均色温,K;
Ti——每个测量点的色温,K;
测点数越多,得到的平均值越精确,不过也相应地增加了工作量。
2.2.2 平均显色指数的计算
与式(1)相同,平均显色指数的计算也是求现场所有测量点的算术平均值。
2.3 测量条件、方法和测量数据分析
2.3.1 测量条件
(1)被测光源宜满足下列要求:白炽灯和卤钨灯累计点燃时间在50 h 以上;气体放电灯类光源累计燃点时间在100 h 以上。
(2)现场测量应在下列时间后进行:白炽灯和卤钨灯应燃点15 min;气体放电灯类光源应燃点40 min。
2.3.2 测量方法
(1)为提高测量的准确性,测量时应等待示值稳定后再读数。
(2)测量人员宜着深色服装,防止测量人员或其他物体的影子对接收器的影响。
2.3.3 测量结果及数据分析
选取了某六车道道路的正向3 条车道进行测量,所用灯具为钠灯,路面平均照度在30 lx 左右。3 条车道总宽10.7 m,将其横向均匀分成5 组,以一盏灯杆的正下方为中心向两边测量,每隔2 m 测量一个点,共85 个测量点。如表1 为显色指数的数据列表,其中9 号测试点为灯杆正下方的点,1 号点和17 号点为灯杆两侧与下一灯杆的中间点。

表1 显色指数数据列表
根据数据分析我们选取其中两组进行数据拟合作图(图4)。

图4 显色指数图
从数据中可看出,路灯的正下方显色指数最小,此处反映的数据为钠灯光源的显色指数,而沿灯的两边则显色指数呈上升趋势,原因就是受环境光的影响,所测得的数据是钠灯光源与环境光复合光的显色指数。

表2 色温数据列表(单位/K)
根据表2 的分析,我们选取其中两组比较,如图5所示为第一组与第三组的色温曲线。

图5 色温图
从曲线上可以发现,色温较显色指数的变化更小,但也存在着路灯正下方的色温为钠灯本身的色温,两边色温逐渐增高的现象,原因是越远离灯杆受到环境光的影响越大,导致了测得的数据逐渐偏高。
3 一种新型的测量方案
从上述常规道路照明的色温与显色指数测量方案中可以看出,现场测量会出现以下问题:
(1)取点过少则会导致数据的不准确性,若测量数据过多则因被测点数多造成数据测量记录、处理工作量大,并且无法连续测量。
(2)使用仪器进行测量时对环境要求较高,需要设置路障以保证工作人员的安全,并且需要工作人员具有良好的测试水平和应对突发事件的能力。
为此在常规道路照明色温、显色指数测量方法的基础上提出了一种新型的测量方法。笔者使用了一套新型的车载式道路照明检测系统,该系统基于CCD传感器,车载式测量道路色温、显色指数、色坐标等色度学参数,并可以动态密集测量。系统引入λ 余弦修正器,凹面衍射光栅等技术,进一步提高了系统的测量效率和精度。该测量系统的系统框图如图6 所示。

图6 车载式道路明显检测系统框图
该仪器的使用步骤简单介绍如下:
(1)将光谱检测系统的传感器通过磁力吸盘放置于汽车顶上,这样可以最大程度降低周围物体反射光的干扰。
(2)使用通信电缆连接系统主机和汽车内的计算机,测量人员只需坐在车内操作软件,便可快速准确地测出所需测量的数据。
驾驶检测车在3 个车道内以约15 km/h 的速度对道路进行来回数次的测试。测出来的色温和显色指数的算术平均值为2 225 K 和38.9,和表3 所示五组手动测量的数据总平均值进行比较,发现数据的结果误差范围在1%之内,也就证明了动态测量方案的准确性。
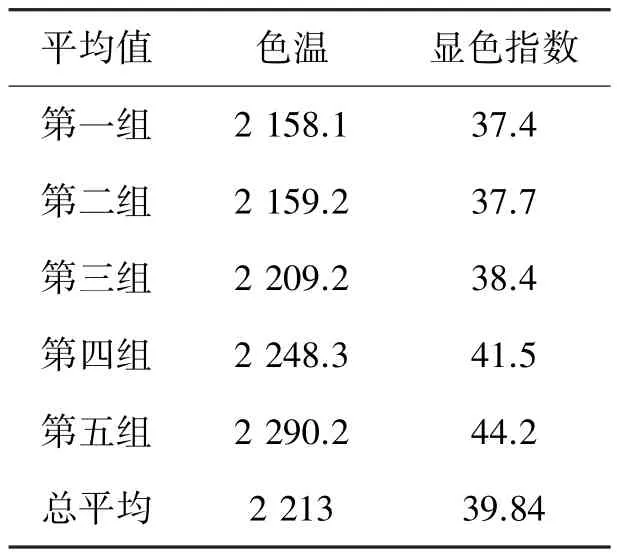
表3
将常规的人工逐点测量法与动态测量法进行对比,动态测量法不仅有测量速度快、测量安全、减小劳动强度、数据处理方便的优点,更由于采用测试汽车自动测量排除了测量人员在测试现场所引起的挡光、反光干扰,有效提高了测试精度和数据采集的准确性。综合现场测量分析,该光谱分析系统符合国家标准中重复性在1%之内的要求。通过现场测量结果的分析,表明该光谱分析系统是准确可靠的,为道路照明色度学参数的现场测量提供了良好的技术支持。
[1]GB 7922—2008 照明光源的颜色测量方法[S]
[2]施克孝.色温、显色指数与色度图[J].演艺科学,2011
[3]刘胜洋,曹明娜,李刚.高灵敏度CCD 光电信号检测系统的设计[J].电子测量技术,2007
[4]孔鹏,巴音贺希格,李文昊,等.双光栅平场全息凹面光栅光谱仪的优化设计[J].光学学报,2011(2)
[5]GB/T 5700—2008 照明测量的方法[S]
[6]秦大为,任军军,沈小明,曹刚.道路照明的照度检测[J].电工技术,2005(7)
猜你喜欢
科教新报(2020年22期)2020-06-11
数学小灵通·3-4年级(2017年3期)2017-04-16
上海农业学报(2017年3期)2017-04-10
光学精密工程(2016年6期)2016-11-07
光学精密工程(2016年5期)2016-11-07
照明工程学报(2016年3期)2016-06-01
军民两用技术与产品(2015年15期)2015-03-09
资源节约与环保(2015年9期)2015-01-27
安徽工业大学学报(自然科学版)(2014年4期)2014-07-11
经营者·汽车消费报告(2013年3期)2013-05-13
