
基于小波变换的AOA定位算法*
2014-11-10 07:09:46毛永毅
网络安全与数据管理 2014年3期
杨 阳,毛永毅,郑 敏
(西安邮电大学 电子工程学院,陕西 西安 710061)
随着现在移动通信技术的高速发展,很多运营商提供的通信服务也越来越多元化,尤其是无线定位技术在诸多领域里都有了非常普遍的应用,如今,移动台的主要定位原理方法有:到达时间(TOA)定位、到达时间差(TDOA)定位、到达角(AOA)定位以及到达角与到达时间混合定位[1]等。
出现定位误差的主要因素有测量器材引起的随机误差,还有无线电波的非视距传播(NLOS)效应和多径效应、多址干扰以及远近效应的影响,从而使得定位估计出现较大的偏差。在这些误差中,非视距传播效应是造成定位误差的首要原因。现有的AOA定位算法有基于神经网络定位[2]、基于遗传算法定位[3]以及其他混合定位算法[3-5]。神经网络的AOA定位算法因前期训练时间长,具有收敛速度慢、神经网络机构选择不一等缺陷,而遗传算法稳定性较差。基于小波分析[6]是一种新的处理信号噪声方法,通过进行变换能够充分突出问题,某些方面的特征在信号的组成部分中,噪声都处在信号的高频部分,有用信号的频谱处在低频部分,小波分析就是通过母小波函数将信号进行平移和尺度变化,得到小波函数的叠加,在不同尺度用小波对其逐步分析以减小误差,使得信号特征明显、计算速度快且精度高。本文即采用小波变换法,先用小波分析其测量数据并进行优化处理,在此基础上使用最小二乘算法进行位置估计,并对该算法进行了仿真和分析。
1 信道模型
本文采用基于几何结构的单次反射统计信道模型(GBSB),在无线定位研究中,这是一种常用的信道模型,其中宏蜂窝环境适合使用基于几何结构的单次反射圆模型(GBSBCM),微蜂窝环境适合使用基于几何结构的单次反射椭圆模型。本文主要采用基于几何结构的GBSBCM,处在城市地区的微蜂窝环境来说,反射射频信号的障碍物比较多,并且移动台到基站的距离接近于小区半径,这样会产生较大的角测量误差,因此这种情形下,基于AOA的单一定位方法没有实际意义。
因宏蜂窝环境的基站相对在很高的位置,小区的半径远小于基站的高度,障碍物比较少,多处于移动台附近,由NLOS效应引起的误差较小,因此本文主要采用基于几何结构的GBSBCM,如图1所示。引起反射的障碍物均匀分布在中心为MS,半径为R的圆上,实际应用中R的值由实际测得数据统计得出。

图1 基于几何结构的单次反射圆模型
由图1模型可得出,最大时延扩展τmac为:
最大角度扩展θmax为:

2 算法描述
2.1 基于小波分析的AOA的修正
小波其实就是把一些特殊的函数作为基,然后将“数据”变换为级数系列来发现类似于频谱的特性以实现其数据处理。小波分析是一种信号的时频 (时域-频域)分析方法,它的特点是多分辨率分析,在时域和频域对信号都有非常好的表征能力。本文使用小波分析对其所测数据的误差进行修正,其实就是对其测量信号进行消噪。
2.1.1小波消噪原理
假设一维信号模型为:

其中,s(x)为含噪声的信号,e(x)为噪声信号,f(x)在实际应用中一般为低频信号。小波分析即对s(x)信号进行小波分解,如图2所示。ca3为近似的平稳信号,它是信号的低频成分;cd1、cd2、cd3为信号的细节成分,为噪声的主要成分,它是信号的高频部分。因此要去除噪声则需要设立阈值门限对其系数进行处理,再对其进行信号重构,即可达到目的。
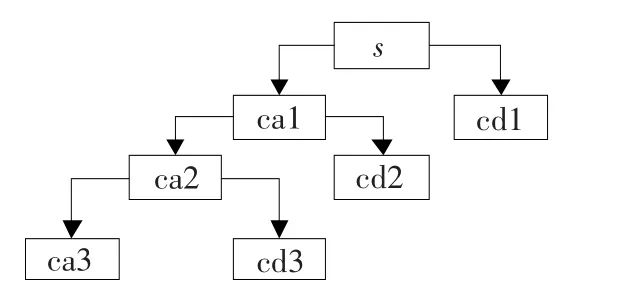
图2 小波的3层分解
2.1.2 噪声模型及其小波分析去除噪声步骤
若 s(ti)表示在 ti时刻的 AOA 测量值,则 s(ti)等于真实值 f(ti)与标准测量误差 e(ti)和 NLOS 误差 NLOS(ti)之和,即:

其中,e(ti)是零均值的高斯变量,NLOS误差为正随机变量。
设 Ψ(t)∈L2(R),由多分辨分析理论得知,则由二阶离散小波函数族{Ψj,k(t),k∈Z}可以构成 L2(R)中的标准正交基[7],那么对于时变信号 f(t)∈L2(R)就有下面的正交小波分解:

其中,N 为分解层数,dj,k为小波分解系数,cj,k为尺度分解系数。
(1)由建立的 7个相关基站提供7个 AOA测量值,其输入向量可表示为:
P=[AOA1,AOA2,AOA3,AOA4,AOA5,AOA6,AOA7]
先对观测数据进行小波变换,得到其小波系数dj,k,并对低频信号进行卡尔曼滤波处理。
(2)通过经验公式 θj=median(|dj,k|)/0.674 5 来 计 算每个尺度下的小波系数均方根误差;再使用经验公式λj=θ1/ln(j+1)来计算每个尺度系数的阈值,这样就可以得到新的小波系数:

当|dj,k|≤λj时,d^j,k=0。
(3)经过(2)阈值处理得到新的小波系数d^j,k,对其进行逆变换进行重构信号,就可以求得预处理后的消噪数据信号,并且可得出输出向量为 o=[T1,T2,T3,T4,T5,T6,T7]。
2.2 定位算法
2.2.1基于AOA的LS定位算法
设基站个数为M,并且假设移动台(MS)位置处在如图3所示阴影部分的1/12小区内,且在小区内为均匀分布。

图3 基站与移动台的位置分布
取 MS 的坐标为(x,y),基站 BSi坐标(xi,yi),所设测量的各基站 AOA值为 θi,则有:

以上公式经过变换为可先转化为:

其中,i=1,2,…,M。
当所测量的AOA的数据存在误差时,就能推导出误差方程:
其中,

可以采用最小二乘(LS)算法来估计MS位置为:

2.2.2基于小波分析的AOA定位算法
因为对于AOA的LS算法误差相对较小,所以在可视距 (LOS)环境下具有优良的的定位效果,然而对于NLOS环境下,那么最小二乘LS的算法引起的误差就相对较大。利用小波分析对在NLOS环境下的AOA测量信号进行修正,从而减小数据中的NLOS误差,最后在使用LS法来进行定位,这样就可以有效地达到提高系统定位精度的目的。
定位步骤如下:
(1)假设先测得有K组在NLOS环境下的AOA数据,建立小波函数式对其进行数据分解变换得到小波系数。
(2)利用门限阈值对小波系数进行处理,重构出AOA数据信号。
(3)对重构的AOA数据信号应用LS算法进行位置估算。
3 仿真与分析
为了检验算法的实际可能性,对于不同的AOA数据测量误差以及在不同小区半径下的定位,将本算法与直接采用最小二乘法的定位算法进行了仿真对比[8],如图3所采用的标准蜂窝网络结构,BS1(0,0)为服务基站的小区中心点,并且所有BS与MS之间均存在NLOS,且AOA系统的测量误差为独立同分布的均值为0,标准差为 0.1 μs(约 30 m)的高斯随机变量。
图4为在不同的小区半径下,本文所采用的定位算法与一般所用LS算法定位以及基于神经网络的定位算法[9]结果比较,在不同的小区半径下纵坐标显示为3种算法定位结果的均方误差值。仿真结果表明,采用本文算法的定位性能比直接采用LS算法及其神经网络算法的要好。当小区半径逐步增加,本文算法的误差增长速度也低于LS算法,在4 km之后误差增长速度才凸显。以上说明,采用小波分析预处理数据在抑制NLOS误差上效果显著,因此对移动台的定位效果同样显著。
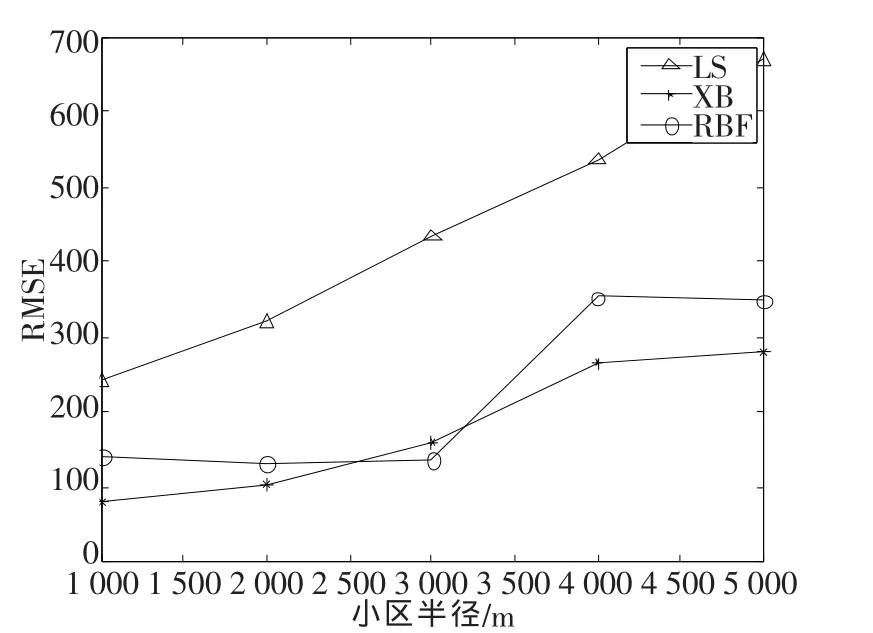
图4 不同小区半径对定位性能的影响
在不同测量误差下,本文所采用的定位算法与LS算法和基于神经网络算法的结果比较如图5所示。图5纵坐标为3种算法在不同测量误差下定位结果的均方误差值。从仿真结果来看,当测量误差逐渐增长时,本文所采用的算法定位效果变化不大,且本文算法的均方误差增长缓慢,变化幅度不大,而对比其他两种算法性能逐渐下降,由此说明本文算法能够明显地抑制NLOS误差以及测量误差,同样在对移动台的定位方面效果良好。

图5 不同测量误差对定位性能的影响
在实际应用中,NLOS误差是影响移动台定位的主要误差,一般算法在其影响下定位效果很差,基于神经网络在移动台定位方面效果明显,但是因为训练时间实在太长,收敛速度缓慢,因此无法付出实施。小波分析预处理测量数据,多分辨、多尺度分析能良好地抑制其误差,而且处理速度快。本文提出了一种在NLOS环境下基于小波分析的AOA定位算法,运用阈值对其信号过滤重构,达到消除噪声的目的,从而使用LS算法进行定位,其效果良好。但是对于小波分析阈值法,在硬阈值函数存在不连续性,在软阈值在小波系数的估计中存在恒定偏差等,因此有待继续研究并改善。
[1]Xie Yaqin, Wang Yan, Zhu Pengcheng,et al,Grid-searchbased hybrid TOA/AOA location techniques forNLOS environments[J].IEEE Communications Letters,2009,13(4):254-256.
[2]毛勇毅,李明远,张宝军.基于RBF神经网络的蜂窝无线定位算法[J].系统工程与电子技术,2008,30(9):1798-1800.
[3]江波,薛磊.基于遗传算法的TDOA/AOA定位系统的布站算法[J].计算机工程与应用,2009,45(24):219-221.
[4]郭丽梅,罗大庸.非视距环境中TOA/AOA混合定位方法[J].电路与系统学报,2010,5(15):26-30.
[5]陈奎,黄为勇,田传耕.基于 Matrix Pencil的 OFDM信号的 TOA/AOA定位 [J].计算机应用研究,2013,30(2):534-536.
[6]Mao Jiandong.Noise reduction for lidar returns using local threshold wavelet analysis[J].Optical and Quantum Electronics.2012,43(1-5):59-68.
[7]卓宁.小波分析技术在GPS数据预处理中的应用[J].中国惯性技术学报,2009,17(2):184-186.
[8]丛爽.面向MATLAB工具箱的神经网络理论与应用[M].北京:中国科学技术大学出版社,2009.
[9]Tian Hui, Wang Shuang, Xie Huaiyao.Localization using cooperative AOA approach[J].Wireless Communications,Networking and Mobile Compution, 2007,9(1):2416-2419.
猜你喜欢
中学生数理化·八年级物理人教版(2021年12期)2021-12-31 03:23:02
科技风(2021年19期)2021-09-07 14:04:29
应用数学(2020年2期)2020-06-24 06:02:40
电子制作(2019年13期)2020-01-14 03:15:32
制造技术与机床(2017年10期)2017-11-28 05:20:43
探索科学(2017年4期)2017-05-04 04:09:47
中国交通信息化(2016年8期)2016-06-06 03:56:25
移动通信(2015年17期)2015-08-24 08:13:10
电测与仪表(2015年18期)2015-04-12 00:45:28
发明与创新(2015年29期)2015-02-27 10:39:43
