海面复杂红外场景仿真系统
2014-10-25 05:26:26吕梅柏
激光与红外 2014年2期
邵 楠,张 科,吕梅柏
(西北工业大学航天学院,陕西西安710072)
1 引言
随着红外探测与制导技术的飞速发展,海面红外场景的计算机仿真生成技术在国防军事领域有着重要的意义,在海面战场势态推演、反舰红外武器方案评估、海面红外目标跟踪算法验证等方面有着广泛的应用[1]。对于海面战场红外场景的仿真问题,文献[2]、[3]详细讨论了舰船的红外图像仿真,文献[4]、[5]对烟幕红外特性进行了研究,文献[6]、[7]分析了红外诱饵弹的红外图像仿真策略,文献[8]、[9]讨论了海面背景的红外视景仿真,文献[10]研究了大气对目标红外特性的影响。本文针对海面导弹—舰船红外对抗中,导引头视场中的红外场景的计算机仿真问题进行了研究,详细讨论红外场景生成中,场景空间参数和红外图特性的解算方法,并给出了海面复杂红外场景的仿真生成方案。
2 系统概述
红外场景生成系统的基本功能是根据实时战场仿真条件,解算生成红外成像导引头探测器所成图像。为了保证图像生成的速度,我们对导引头成像系统进行了简化,由于仿真中所讨论的空间高度远小于地球半径,因此在仿真中忽略了地球表面曲率的影响;系统假设导引头成像系统滚转通道理想解耦,光学成像系统与探测器信号处理系统处于理想工作状态;系统所仿真的是远海岸的导弹—舰船红外对抗,红外图像的背景以海面为主,不存在海岸的红外特性。
系统主要包括场景空间参数解算、场景红外特性计算、复杂场景的融合等几个部分,图1给出系统的结构示意。
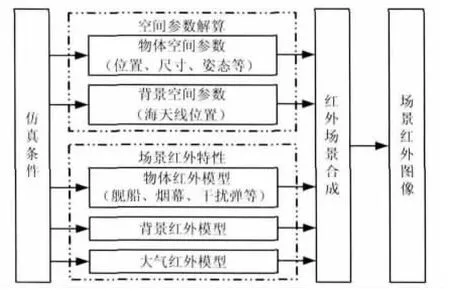
图1 海面复杂红外视景仿真系统
3 空间参数解算
场景的空间参数包括物体空间参数和背景空间参数两部分。物体的空间参数主要包括物体在图像中的位置和物体的大小,对于可实现几何外形描述的物体,空间参数还包括物体在视景中的姿态;背景的空间参数主要是指海天线在图中的位置。在仿真过程中,根据各个海面物体和导弹的空间位置,以及导引头的视场方向,利用仿真中描述运动的各种坐标系之间的关系,来解算仿真视景中的各个空间参数。
3.1 坐标系定义
系统所涉及的坐标系包括地面坐标系、视线坐标系、图像坐标系和体坐标系。下面给出这四个坐标系的定义。
3.1.1 地面坐标系Oxyz
与仿真系统的惯性坐标系重合,原点为仿真系统的参考原点,Ox轴指向参考原点的水平正前方,Oy轴指向原点的正上方,与Ox轴垂直,Oz垂直于xOy平面,方向按右手定则确定。
3.1.2 视线坐标系OLxLyLzL
原点位于导引头框架中心,OLxL轴与导引头光学系统的主光轴重合(即导引头视线方向),指向头部为正;OLyL轴在光学系统纵向对称平面内,与OLxL垂直,向上为正;OLzL轴垂直于xLOLyL平面,方向按右手定则确定。
3.1.3 图像坐标系OPxPyP
原点在图像右上方,横向为x轴,向右为正,纵向为y轴,向下为正。
3.1.4 体坐标系OSxSySzS
原点在物体质心,OSxS轴与物体参考主轴(对于轴对称物体,一般为对称轴)重合,指向物体前方为正;OSyS轴位于物体纵向参考平面内,与OSxS垂直,向上为正;OSzS轴垂直于xSOSyS平面,方向按右手定则确定。
3.2 坐标系之间的关系
3.2.1 地面坐标系Oxyz与视线坐标系OLxLyLzL
这两个坐标系之间的变换可以通过两次旋转实现。他们之间的相互方位可由两个角度确定,分别定义如下:
(1)视线偏航角e1为视线方向矢量(即OLxL轴)在水平面xOz上的投影Ox'L与Ox轴的夹角,沿Oy向下看,当Ox轴逆时针方向转到投影Ox'L上时,e1为正;
(2)视线俯仰角e2为视线方向矢量与水平面xOz之间的夹角,视线矢量在水平面上方时,e2为正。
设地面坐标系中的某一矢量(x,y,z)T在视线坐标系各轴上的分量分别为 xL,yL,zL,则:

3.2.2 视线坐标系OLxLyLzL与图像坐标系OPxPyP
这两个坐标系之间关系的描述用于最终确定视场中的各个物体的空间参数。设导引头的瞬时视场角为θ,探测器所成图像为K×K阵列。对于视线坐标系中的矢量(xL,yL,zL)T在图像坐标系中的投影坐标为:
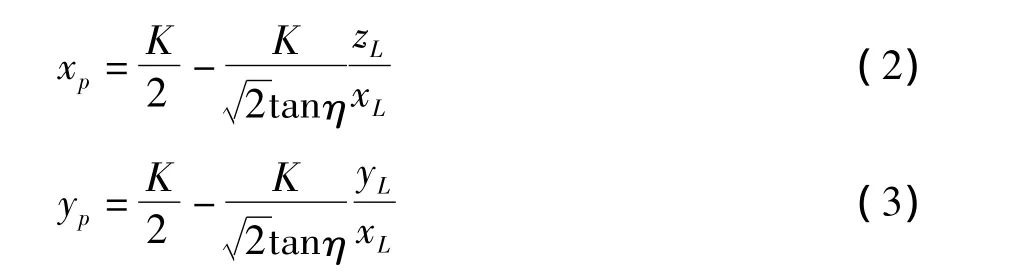
式中,η =θ/2。
3.2.3 地面坐标系Oxyz与体坐标系OSxSySzS
这两个坐标系之间的关系可以用俯仰、偏航、滚转三个角度来描述,其定义如下:
(1)偏航角ψ为OSxS轴在水平面上的投影与地面坐标系Ox轴之间的夹角。由Ox轴逆时针方向转至OSxS轴的投影线时,偏航角ψ为正(转动角速度方向与Oy轴的正向一致)。
(3)滚转角γ为OSyS轴与包含OSxS轴的铅垂平面之间的夹角。沿OSxS轴方向看,若OSyS轴位于铅垂平面的右侧,则γ为正(转动角速度方向与OSyS轴的正向一致)。
设地面坐标系中的某一矢量(x,y,z)T在体坐标系各轴上的分量分别为 xS,yS,zS,则:

其中,

3.3 物体空间参数的解算
3.3.1 位置参数解算
每一仿真时刻,根据仿真场景中各个物体的运动学模型,解算得到当前各个物体的位置,即物体在地面坐标系的坐标{Pi|i=0,1,…n},Pi表示第 i个物体的三维坐标。设P0为导弹的坐标,则第i个物体相对于导弹的相对位置矢量Pri=Pi-P0,i=1,…,n;将Pri带入式(1),得到视线坐标系下的各个相对位置矢量PL-ri;再利用式(2)~(3),即可得到目标质心坐标在图像坐标系中的投影位置。
3.3.2 尺寸参数解算
物体在图像中的尺寸大小SP是根据当前导弹与物体的距离,将物体的实际空间尺寸S利用空间几何关系按比例缩放得到的,其计算公式为:

式中,xr为 PL-ri在x方向的分量。
3.3.3 姿态参数解算
对于可以进行几何外形描述的物体,还需要考虑物体投影到图像上的姿态信息。物体在视场中的姿态用视线方向矢量在体坐标系中的两个方向角来描述,方向角的定义与视线方向在地面坐标系中的方向角e1,e2的定义类似。
在解算姿态参数时,首先利用式(4)得到视线方向矢量在体坐标系下坐标(xS,yS,zS)T,然后解算视线方向矢量在体坐标系中的两个方向角,从而得到物体在视场中的姿态。
本系统中,需要考虑姿态参数的物体只有舰船。船体的3D模型借助专业建模软件3DS MAX搭建,然后提取各个视角下船体的影像,将其做成数据库,在仿真运行时,根据实时解算出的船体在视场中的姿态,直接调用数据库中相应的图像。
3.4 背景空间参数的解算
海面背景的空间参数主要是海天线在图中的位置。设探测器所在位置的的惯性系坐标为(x,y,z)T,视线偏航角与视线俯仰角分别为e1,e2,海面高度为hsea,则视线正前方海面上的一点(xa,ya,za)T可表示为:

利用式(1)~(3)可解算出该点在图像中的位置坐标 xpa(e1,e2;a),ypa(e1,e2;a),当 a→ +∞时:
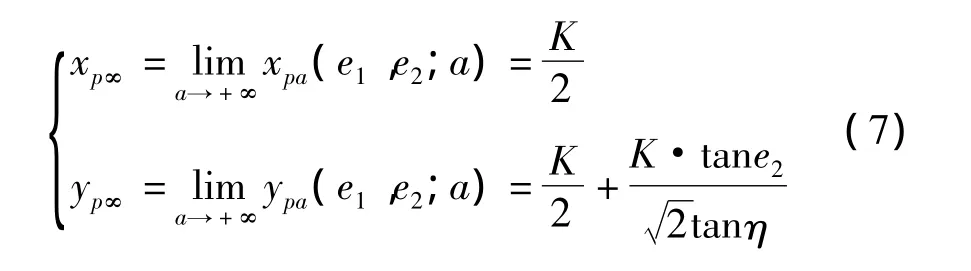
由于视线正前方无穷远处的海面上的点一定位于图像中的海天线上,因此,在导引头滚转通道理想解耦的前提下,海天线在红外图像中的位置为yp=yp∞。
4 红外特性解算
系统需要考虑的红外特性包括各种物体的红外特性、海面背景的红外特性以及大气红外特性。
4.1 各种物体红外特性
红外场景生成系统中所考虑的物体主要包括舰船、红外诱饵弹和红外干扰烟雾。
4.1.1 舰船红外特性
舰船是一个比较复杂的红外辐射源,它的红外特性包括物质自身的红外热辐射和船体表面对环境中的红外辐射(如日、月红外辐射,大气红外辐射等)的反射;由于船体各个部分功能与结构的差异,船体各部分的红外热辐射特性也有所不同。文献[2]、[3]详细的讨论了舰船的红外特性精细模型与仿真方法,这类方法虽然模拟精度较高,但是运算量较大,不适合在本系统中使用;本系统所采用的方法是以舰船实测红外数据为基准,根据仿真条件的要求加以适当修正,这样既能满足真实性,也同时能保证运算速度。
4.1.2 烟幕红外特性
烟幕的红外模型主要包括烟幕的衰减作用和烟幕自身的辐射特性两个部分[4-5]。
烟幕的衰减特性用烟幕的透过率α来描述:

其中,C为烟幕浓度;S为光程;MC为消光系数,它与发烟剂性质、烟幕粒子的大小、辐射频段、空气相对湿度等有关[5]。
烟幕粒子的温度衰减过程采用下式进行描述:

其中,T(t)是t时刻烟雾粒子的温度;T0是烟雾粒子的初始温度;Te是环境温度;c是温度衰减的控制系数[4]。根据黑体辐射理论,计算仿真波段内相应的黑体温度对应的辐射量,即可实现对烟幕自身的辐射特性的仿真。
4.1.3 诱饵弹红外特性
舰载红外诱饵的的种类很多,本系统所考虑的主要是箔条点源诱饵弹。在使用这类诱饵弹时,一般会连续投放多枚,对成像导弹起到干扰作用。系统参考文献[6]、[7]给出的实测的诱饵弹红外辐射特性随时间的变化曲线,来对诱饵弹的红外辐射特性进行仿真。
4.2 海面红外特性
海面背景的红外特性与海水自身的红外辐射以及海水表面对环境辐射的反射有关[8-9]。海面的红外辐射模型可表示为

式中,Lsea为海水辐射亮度;Le为海面接收的天空背景辐射亮度;Lsund为太阳直射辐射亮度。max(0,cosnα)项来源于Phong光照模型,用于模拟海面对太阳直射辐射的镜面反射效果;α是太阳辐射反射出射方向和探测器方向的夹角;n是高光系数,对于海面可取100~200之间的整数[9]。
4.3 大气红外模型
大气红外特性主要包括大气衰减和路径辐射两个部分,通常采用LOWTRAN或MODTRAN进行计算[10]。仿真系统中,我们根据设定的环境条件(包括气候、目标和探测器之间的距离、大气温度等),采用 MODTRAN4.0[11]计算大气红外辐射特性。
5 海面复杂红外场景生成
考虑到系统所生成的图像是用于反舰导弹的红外制导阶段,这一阶段的的持续时间较短。为了减小计算负担,本系统假设在红外制导攻击过程中,舰船、背景以及大气的红外特性保持不变。海面战场复杂红外视景生成流程包含以下几步:
a.根据设置的初始化仿真条件,解算舰船、背景和大气的红外特性;
b.根据仿真中各个物体的运动模型,得到各个物体的空间位置和导引头视场方向,进而解算导引头视场中各个物体和背景的空间参数;
c.若当前仿真时刻存在诱饵弹或红外烟幕,则根据相应物体当前状态,解算其红外特性;
d.海面红外场景融合。首先,根据背景红外特性,创建背景图像;然后,按照物体距离导引头由远到近的顺序,根据不同物体的红外特性,依次融入各个物体;最后,根据大气模型,对场景图像做进一步处理,得到最终的红外场景。
6 仿真结果
实验中设计如下仿真场景来对本文讨论的海面红外场景仿真系统进行测试:初始时刻,导弹与舰船之间距离4000 m,且导弹与舰船质心位于相同高度;运行过程中,导弹保持恒定速度沿弹舰连线向着舰船飞行,导引头视线方向始终朝向舰船,当弹舰相距3500 m时,舰船开始释放红外诱饵弹和红外烟幕。下图给出在这样一过程中,不同弹舰距离下,仿真系统生成的红外场景。

图2 不同弹舰距离下仿真的红外场景
由仿真结果可以看出,本文讨论的海面红外场景仿真系统生成的图像,可以作为红外成像反舰导弹导引头所观察到的视景,进行与之相关的计算机仿真研究。
7 结语
红外视景计算机仿真技术在红外目标跟踪技术的研究、红外武器研发评估等方面具有重要的意义。针对红外成像反舰导弹与舰船对抗的计算机仿真中,导引头视场计算机仿真问题,本文设计了海面复杂红外场景仿真生成系统。该系统能够有效的实现复杂的海面红外场景的实时解算,可应用于反舰红外武器方案评估、海面红外目标跟踪算法验证等相关的仿真研究。
[1] Xie Weibo.A method of real- time infrared scene simulation[D].Xi'an:Xidian University,2006.(in Chinese)解卫博.一种实时红外场景仿真方法研究[D].西安:西安电子科技大学,2006.
[2] Chen Qinghua,Xie Xiaofang,Li Zongsheng,et al.Research on infrared scene simulation of ship targets[J].Infrared and Laser Engineering,2008,37(S2):413 -416.(in Chinese)陈青华,谢晓方,李宗升,等.舰船目标红外视景仿真研究[J].红外与激光工程,2008,37(S2):413-416.
[3] Chen Xuan,Wang Yanwu,Zhang Jian,et al.The simulation of infrared characterization of ship at 8 ~14μm[J].Laser& Infrared,2007,37(12):1278 - 1280.(in Chinese)陈翾,王艳武,张健,等.舰船8~14μm波段动态红外特征模拟[J].激光与红外,2007,37(12):1278 -1280.
[4] Zhang Tao,Huang Xi.A method for simulating the dynamic IR image of smoke[J].Electronic Science and Technology,2010,23(8):20 -24.(in Chinese)张涛,黄曦.一种动态红外烟幕图像仿真方法[J].电子技术,2010,23(8):20 -24.
[5] Li Hongning,Bai Tingzhu,Wang He,et al.Smoke model for infrared scene imaging simulation and characteristic analysis[J].Journal of System Simulation,2011,23(10):2248 -2253.(in Chinese)李宏宁,白廷柱,王贺,等.用于场景仿真的红外烟幕模型及其特性分析[J].系统仿真学报,2011,23(10):2248-2253.
[6] Schleijpen Ric H M A,Degache Marianne A,Henny Veerman,et al.Modelling infrared signatures of ships and decoys for countermeasures effectiveness studies[C]//Conference on Technologies for Optical Countermeasures IX,2012(85430I):1 -12.
[7] Wang Hongqiang,Fang Yangwang,Wu Youli,et al.The study of infrared decoy jamming characteristic and simulation[J].Fire Control & Command Control,2010,35(4):25 -28.(in Chinese)王洪强,方洋旺,伍有利,等.红外诱饵弹干扰特性与仿真[J].火力与指挥控制,2010,35(4):25 -28.
[8] Karine Caillault,Sandrine Fauqueux,Christophe Bourlier,et al.Multiresolution optical characteristics of rough sea surface in the infrared[J].Applied Optics,2007,46(22):5471-5481.
[9] Shi Kun,Hao Yingming,Wang Mingming,et al.Realtime simulation method of infrared sea background[J].Infrared and Laser Engineering,2012,41(1):25 - 29.(in Chinese)石坤,郝颖明,王明明,等.海面背景红外实时仿真[J].红外与激光工程,2012,41(1):25 -29.
[10] Dong Yanzhi,Zhou Xiaodong.The progress of the atmospheric infrared emission models and practical codes[J].Laser& Infrared,2003,33(6):412 -416.(in Chinese)董言治,周晓东.大气红外辐射模型与实用算法的研究进展[J].激光与红外,2003,33(6):412 -416.
[11] A Berk,G P Anderson,P K Acharya,et al.Modtran4 user’s manual[M].Air Force Research Laboratory Space VehiclesDirectorate,AirForce MaterielCommand Hanscom Afb,2000.
猜你喜欢
作文新天地(小学版)(2022年8期)2022-05-30 04:30:04
特区文学·诗(2021年6期)2021-12-22 01:02:51
红蜻蜓·低年级(2021年2期)2021-07-20 04:48:09
小学科学(2020年6期)2020-06-22 13:13:41
金色少年(奇趣科普)(2017年11期)2017-11-28 05:41:41
小学生导刊(2017年18期)2017-05-17 05:44:37
制导与引信(2016年3期)2016-03-20 16:01:58
火控雷达技术(2016年1期)2016-02-06 02:18:01
当代贵州(2015年19期)2015-06-13 09:42:32
弹箭与制导学报(2015年1期)2015-03-11 15:32:08