车载红外夜视系统行人告警算法研究
2014-10-25 05:26:44葛军晓
激光与红外 2014年8期
林 昱,周 阳,葛军晓
(北京波谱华光科技有限公司,北京100015)
1 引言
近年来,夜间道路交通事故呈不断上升趋势,对行人及驾驶员的生命安全造成极大的威胁。车载红外夜视告警系统因其潜在的巨大商业价值越来越受各大汽车厂商的青睐。其中,行人检测算法是整个夜视告警系统的关键技术和难点所在。特别是对红外图像来说,数据位宽一般在12 bit以上,在嵌入式系统运算能力和处理速度一定的情况下,对行人检测算法的复杂度和执行效率有着更加严格的要求。现有的行人检测方法很多,比如基于梯度直方图统计[1-2]的方法,在实际全图检测时存在检测准确率低、检测速度慢的缺点;“帧差法”[3]由于实现简单常用于目标区域提取,但当环境变化较大时,往往不能稳定地表示场景;还有Masoud O的人体建模法[4],在建模复杂度、计算效率等方面也存在一定的局限。针对上述算法的缺点和不足,本文以单帧红外图像为基础,旨在研究一种简洁、快速的基于特征分析的行人检测算法,以满足工程应用准确性和实时性的要求。
2 红外夜视系统行人告警算法原理
车载红外夜视告警系统利用红外热成像技术,将接收到的汽车夜间行驶道路前方目标与背景的红外辐射映射成灰度值,利用目标和背景间的温度差进行行人检测,弥补了可见光在夜间探测能力不足的缺陷。要从摄像头采集到的红外图像中提取行人目标,实际上是属于数字图像处理中运动目标检测的范畴。典型的行人检测算法处理流程包括图像去噪、阈值分割、目标提取、目标识别这几个步骤[5],最终将检测到的行人目标用告警框标识出来实现对行人的告警。图1是奥迪A8推出的热成像夜视助手效果图。
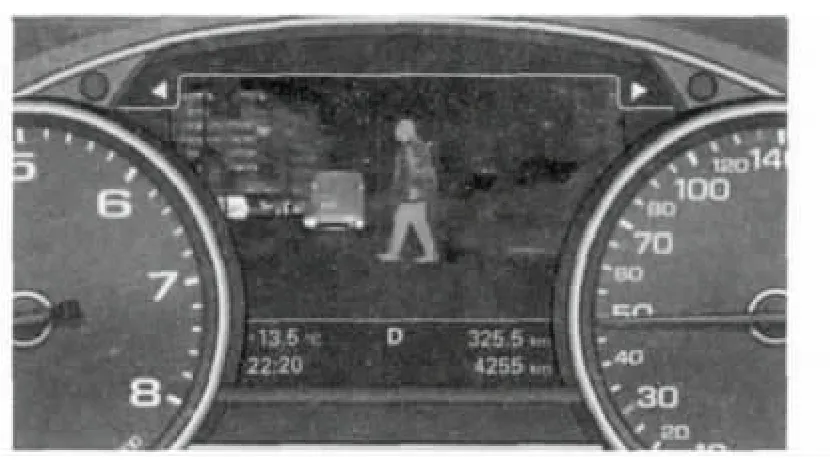
图1 奥迪A8夜视辅助系统效果图
3 本文的算法改进
针对引言部分提到的传统算法存在的一些问题,本文在图像分割和目标识别这两个步骤做了一定的改进,整个算法处理流程如图2所示。

图2 行人检测算法处理流程
3.1 图像分割
与“帧差法”不同,本文算法在单帧图像基础上进行阈值分割。先用中值滤波法对原始红外图像数据进行去噪,然后再经过一个高通滤波器进行背景抑制。常用的高通滤波器分为空域和频域两类。若滤波器的输入为函数f(x,y),输出信号为g(x,y),设滤波器的脉冲响应函数为h(x,y),用“*”表示卷积运算,则:

这里采用5×5的空域高通模板H:

预处理后得到的图像包含了背景噪声、运动目标和边缘区域,需选取一个合适的阈值进行“二值化”分割(环境背景等低灰度级像素置为“0”,行人、汽车发动机等灰度级较高的目标置为“1”)。二值化的阈值选取非常关键,阈值过高,会造成变化区域缺损和碎化,反之会引入大量背景噪声。这里我们采用统计分割的方法来自适应求取分割阈值,其理论依据是预处理后图像近似服从准高斯分布,随机变量取均值三倍标准差邻域之外的值的概率很小,而目标灰度值一般较高,容易处于三倍甚至更高倍数标准差之外,因此分割门限一般取均值累加三倍或更高倍数标准差。统计分割方法可以表示为:
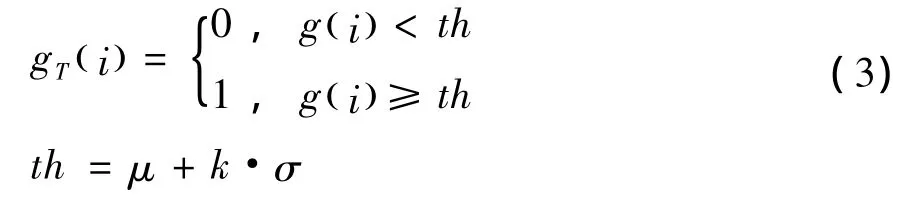
其中:

式中,M,N分别为图像行数和列数;μ为均值;σ为标准差;th为分割阈值;取k=3。
阈值分割后,我们还需进一步修正二值图像,采用形态学[6]“开运算”切断细线,消除图像边缘毛刺和孤立点,平滑图像边界。因受复杂背景以及噪声的影响,处理后的图像中还会存在大量小面积连通区域,这些区域的面积明显小于行人,可以设定一个面积阈值去除这些干扰区域,以减轻后续的计算量。
3.2 目标识别
在目标识别方面,本文先提取出单帧图像内的各个候选目标,采用“连通域检测算法”[7]对阈值分割后的二值图进行区域标记。在区域标记的基础上可以进行连通域分析,计算目标的几何特征参数并根据机器视觉中行人的一些先验知识来完成单帧内行人目标的筛选[8]。然后,再结合行人在相邻几帧内运动轨迹的连贯性和运动规律,进一步将一些与行人形状、大小相似的虚警目标剔除掉得到最终的行人目标。这样做的好处在于:采用连通域分析的参数计算量要远小于模板匹配[9],同时考察连续帧图像目标的空间分布和运动规律又弥补了仅对单帧图像进行检测准确度较差的缺陷。
本文中连通域分析用到的主要指标有外接矩形、面积、高宽比及形状分散度[10]。外接矩形(式(6)~(9))是行人检测中非常重要的信息,对标定行人的位置起到重要作用;高宽比C(式(10))、形状分散度S(式(11))也是进一步获得目标形状特征相关的参数。根据已有的一些统计数据可知行人的高宽比有一定的范围,大致在1.4~4这个区间。
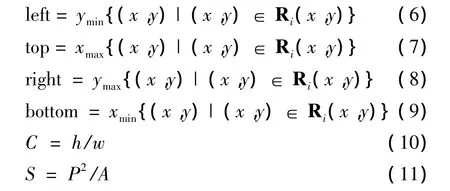
其中,C为连通区域高宽比;h为连通域高度;w为连通域宽度;形状分散度S表示目标的复杂程度;P为连通域周长;A为连通域面积。
4 实验结果和分析
根据以上算法,我们对室外夜间(环境温度25℃)拍摄的简单路况下的20组红外视频序列进行了算法仿真。采集用的光学系统焦距f=15 mm,F数1.0,探测器像元尺寸25 μm,红外图像分辨率为384×288像素,告警距离15~90 m。算法中阈值分割系数取k=3,小面积区域去除时面积阈值为30,高宽比C取1~4,形状分散度在10~25之间,算法处理效果如图3所示。根据实验统计结果,在处理的所有视频序列中,行人识别率达到85.2%以上,漏检率在4%左右,处理帧频大于20 Hz,在一定条件下满足车载夜视系统对行人检测算法检测率和实时性的要求。
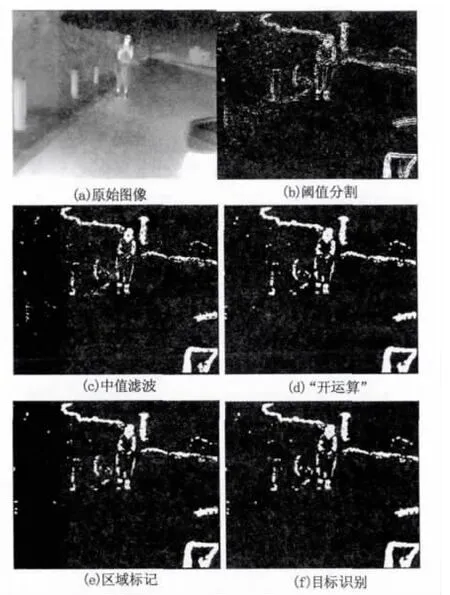
图3 算法处理效果图
5 结论
本文针对传统行人检测算法存在的一些问题,提出了基于单帧红外图像的特征分析算法,特别在图像分割和连通域分析环节做了一定的改进并进行了验证。但实验采集的红外道路图像较典型,场景比较单一,引入的干扰因素也少;而实际的道路千变万化,所拍摄的图像也复杂多变,本文中提到的方法在处理中势必会存在虚警增多等问题,且对于多个行人交叠一起的情况也存在漏检现象。因此,要想实现运动行人的精确检测,满足智能车辆工程化要求,需要进一步改进算法,如增加对于复杂场景道路边界模型的识别处理等。总之,要完善车载红外夜视系统行人告警算法,深入研究准确、实时的提取运动目标是一项非常艰巨的任务。
[1] Navneet Dalal,Bill Triggs.Histograms of oriented gradients for human detection[C].CVPR,2005:886 -893.
[2] Dalal N,Triggs B.Histograms of oriented gradients for human detection[C]//Proc of the IEEE Conference on Computer Vision and Pattern Recognition,2005:886 -893.
[3] LIN Hongwen,TU Dan,LI Guohui.Moving objects detection method based on statistical background model[J].Computer Engineering,2003,29(16):97 - 99.(in Chinese)林洪文,涂丹,李国辉.基于统计背景模型的运动目标检测方法[J].计算机工程,2003,29(16):97 -99.
[4] Masoud O,PapanikolopoulosN P.Robustpedestrian tracking using a model- based approach[C].Intelligent Transportation System,1997:338-343.
[5] SU Xiaoqian,SUNShaoyuan,GE Man,et al.Pedestrian detection and tracking of vehicle infrared images[J].Laser& Infrared,2012,42(8):949 -953.(in Chinese)苏晓倩,孙韶媛,戈曼,等.车载红外图像的行人检测与跟踪技术[J].激光与红外,2012,42(8):949 -953.
[6] 章毓晋.图像处理和分析[M].北京:清华大学出版社,1999.
[7] XU Zhengguang.Pixel labeled algorithm based on recursive method of connecting area in binary images[J].Computer Engineering,2006,32(24):186 - 188.(in Chinese)徐正光.基于递归的二值图像连通域像素标记算法[J].计算机工程,2006,32(24):186 -188.
[8] Elzein H,Lakshmanan S,Watta P.A motion and shape -based pedestrian detection algorithm[C].Intelligent Vehicles Symposium,Proceedings,IEEE,2003:500 -504.
[9] Gavrila D M,Philomin V.Real-time object detection for smart vehicle[C].Computer Vision,1999:87 -93.
[10] WANG Chenghao,LIU Fuqiang,TIAN Min,et al.The algorithm of vehicle identification and tracking based on blob analysis[J].Signal Processing,2005,21(4A):370 -374.(in Chinese)王臣豪,刘富强,田敏,等.基于Blob的车辆识别及其跟踪算法研究[J].信号处理,2005,21(4A):370-374.
猜你喜欢
环球时报(2022-05-23)2022-05-23 11:28:37
金桥(2021年4期)2021-05-21 08:19:20
意林(2021年5期)2021-04-18 12:21:17
电子制作(2019年7期)2019-04-25 13:17:14
扬子江(2019年1期)2019-03-08 02:52:34
电子测试(2018年22期)2018-12-19 05:13:02
小天使·一年级语数英综合(2017年6期)2017-06-07 23:51:16
军事文摘(2016年24期)2016-12-10 02:49:02
光学精密工程(2016年3期)2016-11-07 09:03:43
大科技·百科新说(2016年4期)2016-05-20 09:36:24