虚拟仿生手联合仿真研究*
2014-10-12 10:47:38尚小晶吴忠伟徐成波
吉林建筑大学学报 2014年4期
尚小晶 吴忠伟 徐成波
(吉林建筑大学城建学院,长春 130111)
第二次世界大战以后兴起了一个新的医学领域即康复医学[1].为了提高残疾人的生活质量,使更多残疾人能像正常人一样生活,康复医学在人们生活中的地位越来越高,智能假肢是最直接的研究对象[2].目前,国内外残疾人采用较多的康复假肢主要是英国Touch Bionics公司的i-Limb[3],还有德国的Otto Bock假肢公司Michelangelo Hand[4],但这些假肢在准确度上还存在不足,其灵敏度和准确度并没有达到人们的满意程度,残疾人在使用过程中会有不便利之处.因此,智能假肢的进一步研究是目前的研究热点,有助于弥补残疾人残端功能缺陷.本文将Adams软件和Matlab/Simulink相结合搭建仿生模型进行研究.对于仿生模型采用的控制算法有很多,PID控制是最经典的算法,并且该算法可以克服其他算法必须已知模型数学表达式的不足,简单快捷的控制模型的动作.但PID控制的适应性较差,PID参数的确定也是其控制的一个问题,在调试过程中控制器参数,是根据试验者经验反复试验、调试确定,这给模型的控制带来不便,延长了调试周期.为了提高效率,本文将模糊理论应用于模型控制,通过模糊规则推测控制器的控制参数,使虚拟仿生手模型能够快速准确的达到目标位置,即完成相应的手势动作.
1 仿生手模型建立
虚拟样机技术在实际生活中的应用是通过虚拟样机软件实现的.目前国内外具有代表性的虚拟样机软件是美国MSC公司的Adams软件.本文主要采用该软件建立虚拟模型,且建立的虚拟模型和实际物理样机的功能一致[4],即实际物理样机可以以虚拟样机为技术依据.
本文建立仿生手的三维模型,仿生手模型一共是14个自由度,每个关节为一个自由度,并设置其对应的参数,该模型的运动由相应的指令控制,该指令来源于手指关节的控制转矩.为了使虚拟手模型更接近食物,在软件中还设置与实物一样的质量、材料和惯量系数.图1为采用ADAMS软件建立的虚拟仿生手模型.
从图1可以看出,采用软件建立的智能假肢仿生手模型和实际智能假肢几乎一样.在建模的过程中,为了使虚拟手完美完成各势动作,本文在建模型时将大拇指位置略为下移,与实际位置有微小偏差.

图1 虚拟仿生手模
2 虚拟仿生手控制系统
本文建立的仿生手模型可以看成是一个多输入多输出的系统,要想对其进行精确的控制比较困难.因此,本文主要是实现仿生手的简单控制,让该模型能够准确的跟踪给定信号变化,通过对虚拟仿生手的控制过程研究,找到实际智能假肢控制研究的不足并加以改进.本文研究的虚拟仿生手模型其给定输入为完成相应动作的各个关节的角度,采用MATLAB/Simulink软件构件控制系统,通过实验研究验证虚拟仿生手模型是否能够快速稳定的实现相应的动作.图2为仿生手的运动控制结构图.
该控制系统通过对各个关节的角度控制,使各个关节能够达到目标角度,完成完整的手势动作.目标位置确定的准确性直接影响手势动作完成的效果,因此需要对各个关节的角度进行精确的控制.
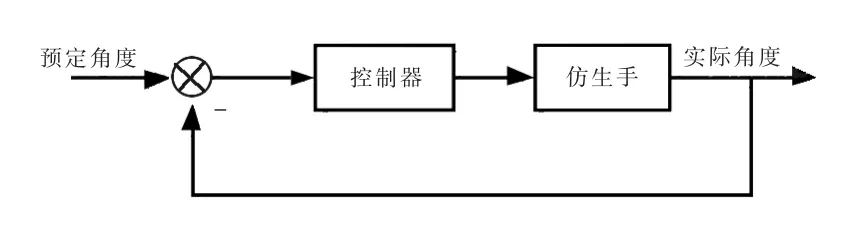
图2 仿生手运动控制结构
3 虚拟仿生手控制器设计
本文以食指为例设计控制器,其他手指则以此为依据推测控制器及参数.同理,食指的3个关节控制方式一样,以一个关节为例设计控制器,稳定性是其正常运行的前提条件,因此通过调试使该关节稳定运行,其他手指及关节均可以此类推.
本文将虚拟仿生手作为控制对象,但该模型无法用精确的数学表达式表示,即模型的控制参数无法通过精确的数学表达式推到出来.所以,被广泛应用于无精确数学模型控制的PID控制器为本文控制器设计的最优选择.图3为PID控制一个关节的结构图.
PID控制器的控制参数只能根据调试者的多年经验及多次实验的推导,该过程周期较长.但每个动作只有对应的一组控制器参数,一旦改变动作PID的参数就必须重新调试确定,适应性较差,效率较低.所以,对于该不足之处急需有一个改进办法.因此,本文提出提出模糊PID控制[5],即将模糊控制与PID相结合,主要是为了克服PID参数调试周期长的不足,将PID参数的调试过程用模糊规则代替,通过模糊规则能快速推测出控制器参数,从而使模型快速完成动作,缩短了调试周期提高效率且增强适用性,即便更换动作也无需重新调试,只需对应上相应的模糊规则即可.
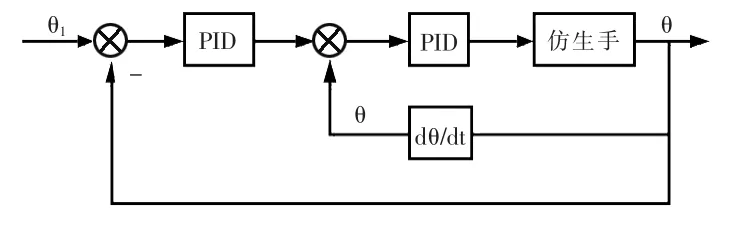
图3 虚拟仿生手关节控制结构
4 联合仿真实验
虚拟仿生手的联合仿真采用Adams和Matlab联合实现,首先用Adams建立模型,然后将该模型与Matlab链接,将其作为Matlab/Simulink的一个成形模块使用,在Simulink中建立控制系统,将本文的控制算法导入该系统,这样控制系统与虚拟手模型子模块就构成了联合仿真系统.图4为虚拟仿生手联合仿真系统的结构图.
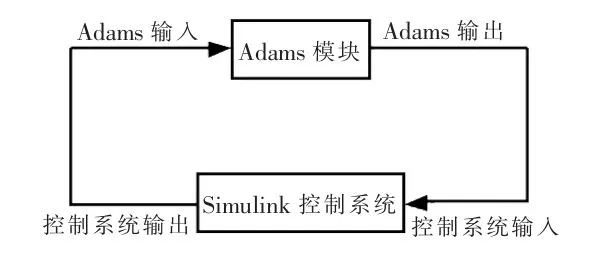
图4 虚拟仿生手联合仿真系统的结构
从图4可以看出,虚拟手模型的输入是控制器系统的输出,控制器系统的输入则是虚拟手模型的输出.这样就构成一个完整的闭环系统,将两个软件结合构成智能假肢仿生模型联合仿真系统.
智能假肢联合仿真系统两大系统之间的数据通信由Adams/Control模块实现.并且在数据通信的过程中会自动生成3个子文件,该子文件应复制到模型所在的文件中,这样模型就能与Matlab形成链接,直接输入Adams_sys即可调用.本文对每个关节均进行了联合仿真实验并进行稳定性分析.
本文所研究的虚拟仿生手模型有14个关节,在这里我们只针对一个手指的3个关节分析,其他手指可以以此类推.对一个手指的3个关节采用模糊PID控制进行控制,使其能够实现位置的精确控制.
5 结论
本文通过联合仿真实验研究实现了虚拟仿生手的简单手势动作,通过对其控制系统进行设计分析,大大提高了效率,为智能假肢实体的研究提供了科学依据.
采用虚拟技术—Adams建立14自由度虚拟仿生手模型,利用具有强大计算功能的Matlab搭建虚拟仿生手的控制系统,将模糊理论和PID控制器相结合,解决了PID控制适应性差的不足,使虚拟假肢能准确的完成相应的动作.同时,本文联合仿真的研究验证了虚拟技术的可行性,为手势动作的识别研究提供了新的验证途径,在以后的研究中可以将手势动作识别的过程和虚拟仿生手模型相结合,将人手部动作更直观、更形象实时在虚拟环境中体现出来,为手势动作识别的进一步研究提供技术依据.
[1]http://www.carm.org.cn/bbs/topic.asp topic_id=2784&forum_id=24&cat_id=6.
[2]The i- limb system[Z].[2010 -5 -27].www.touchbionics.com
[3]Cybenko G.Approximation by superposition of a single function[J].Mathematics of Control,Signals and Systems,1989,35:335 -336.
[4]王 涛,张会明.基于ADAMS和MATLAB的联合仿真控制系统仿真[J].机械工程与自动化,2005(5):81-83.
[5]M.Perus.Neuroquantum parallelism in brain mind and computers[J].Informatica,1996(20):173 -183.
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08 02:42:40
装备制造技术(2020年4期)2020-12-25 05:26:04
中外文摘(2020年19期)2020-10-31 12:51:08
意林·全彩Color(2018年7期)2018-08-13 09:35:14
电子制作(2018年12期)2018-08-01 00:47:44
制造技术与机床(2017年6期)2018-01-19 02:41:21
电子制作(2017年19期)2017-02-02 07:08:38
时代农机(2016年6期)2016-12-01 04:07:20
当代化工研究(2016年6期)2016-03-20 16:21:46
环境科技(2015年4期)2015-11-08 11:10:40