基于机载LiDAR和高分辨率遥感影像的道路中心线提取
2014-09-29 02:37黄彦丽
地理空间信息 2014年4期
杨 燕,黄彦丽,马 静
(1. 青海省基础地理信息中心,青海 西宁 810001)
机载激光雷达系统LiDAR是一种新型的综合应用激光测距仪、IMU、GPS的快速测量系统,可以直接联测地面物体各个点的三维坐标[1,2]。由于LiDAR只能获得地面目标的高程信息,却不能获得其语义信息,将LiDAR数据与高分辨率遥感影像结合,研究目标特征的提取,具有重要的学术价值和应用前景。本文利用数学形态学的理论和方法,根据高分辨率遥感影像中道路的特点[3],结合LiDAR点云数据,对高分辨率卫星遥感影像中的道路中心线提取进行研究,试图获得一种比较合适的道路中心线提取方法。
1 原理及流程
本文的研究基于Matlab7.8、ENVI7.0和ArcGIS10平台,截取部分徐州市城区的遥感影像和机载LiDAR点云数据进行实验。遥感影像是空间分辨率为0.67 m的QuickBird多光谱影像(包括R、G、B三个波段,已完成影像融合),机载LiDAR点云数据的空间分辨率为5 m,如图1。

基于机载LiDAR和高分辨率遥感影像提取道路中心线的基本思想是,首先利用配准的LiDAR数据生成DSM深度影像,基于DSM深度影像提取建筑物轮廓;然后利用遥感影像的多光谱波段采用监督分类的方法提取植被;在此基础上,采用减法运算将建筑物和植被剔除,剩下部分利用一系列形态学算子,如形态学滤波器、形态重建、形态开闭运算等对道路进行修饰和完善,并提取道路中心线;最后,根据准确率、遗漏误差、冗余误差3个参数指标来定量分析道路提取的效果。提取流程如图2。

2 基于机载LiDAR和高分辨率遥感影像的道路中心线提取
2.1 点云和影像配准
针对LiDAR点云数据和高分辨率遥感影像的配准问题,国内外学者作了广泛研究[4,5]。虽然都能较准确地进行LiDAR数据与影像的配准,但过程大多比较复杂。本文基于ArcGIS平台,通过寻找遥感影像和LiDAR点云数据上的同名建筑物的质心进行配准,方法简单高效,主要步骤如下;①将LiDAR点云数据转换成ArcGIS支持的点数据;②以QB数据为基准数据,将点数据的xy坐标各加39 000 000,完成粗配准;③将点数据转换成TIN;④对照高分辨率遥感影像找到TIN对应的区域;⑤对照TIN数据,在点数据和遥感影像上寻找同一建筑物的质心,作为同名点;⑥寻找大约7个左右的均匀分布的同名质心点;⑦利用ArcGIS中的Georeference工具进行配准。配准结果如图3所示,左图为点云数据生成的TIN与点的对照图,右图为影像和点的对照图。

2.2 基于LiDAR数据的建筑物提取
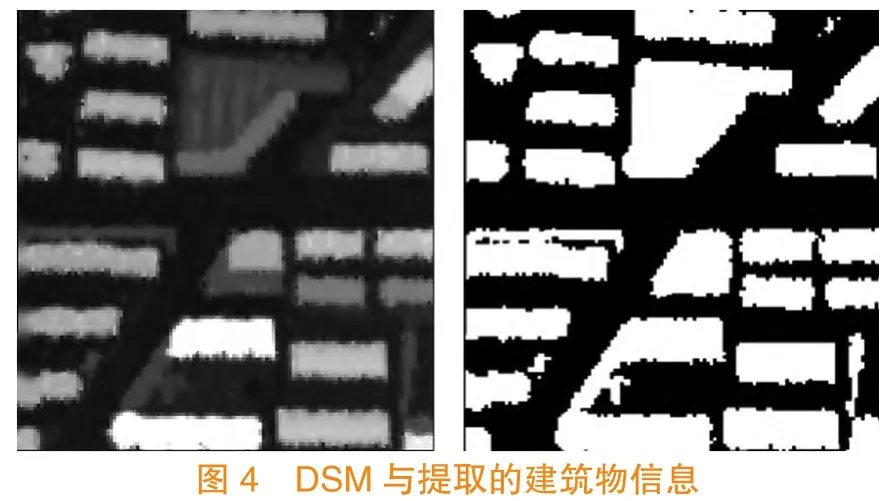
从图3可以看出,建筑物轮廓在用LiDAR点云数据构建的TIN上很明显,那是因为建筑物相对于地面来说具有较高的高程。根据这一点,将配准后的点生成DSM,然后将生成的DSM转换成灰度深度影像,利用深度直方图分割提取建筑物边缘信息,如图4所示。
2.3 基于高分辨率遥感影像的植被提取
植被信息在高分辨率遥感影像上表现为深绿色或浅绿色区域。分别选择马尔科夫距离分类器和神经网络分类器进行分类,结果如图5所示。可以看出,两种分类器提取的植被信息都比较准确,但神经网络分类器运行时间大大长于马尔科夫距离分类器。

2.4 道路轮廓的提取
在以上步骤基础上,将获得的建筑物信息和植被信息叠加到一幅图像上,获得一幅二值图像,如图6a;然后用同样大小的图像减去叠加图像,得到基本的道路轮廓,如图6b。

2.5 基于形态学处理的道路信息提取
2.5.1 图像非道路图斑的去除
经过以上处理,图6b中的非道路图斑主要表现为尺寸较小的点状信息。为了去除这些噪声,根据图像的特征,选择尺寸逐渐增大的圆形结构元素进行形态滤波,处理后的结果如图7a。

2.5.2 道路信息的细化和修剪
利用形态滤波将非道路图斑去除后,道路网络仍存在一些不足,如道路截断、道路中的孔洞和边缘存在“毛刺”等现象,需要进一步完善。
1)道路细化。道路提取的最终目的是得到矢量化的地理信息并添加到数据库中,在完善道路的基础上提取道路中心线构成矢量道路网络。形态细化道路可以获取一个像素宽度的道路中心线,如图7b。
2)道路修剪。道路经过细化后所得的道路中心线有许多“毛刺”,这些“毛刺”或是非道路部分,或是一些小岔路,需要进行处理。基于道路知识使用如下两个规则连接缝隙和去除短线段。基于ArcGIS平台进行处理,最终提取的道路中心线如图7c,叠加图像如图7d。
规则1 对于一条线段M,如果存在一条线段N在相反方向或接近相反的方向指向线段M,并且存在一个缝隙(小于6个像素)在线段M和N之间,那么线段M和N应该被连接起来。
规则2 如果一条短线段(小于6个像素)从一个十字或T型结点开始,而且没有其他线段在相反或近似相反的方向指向这条短线段,这条短线段应该被去除。
3 精度评价及结果分析
3.1 完整性分析
为了评估提取的道路的准确性,把提取的目标与原始遥感影像重叠,结果如图8。图8a为未结合LiDAR数据,高分辨率遥感影像结合数学形态学的道路中心线提取;图8b为基于机载LiDAR和高分辨率遥感影像结合数学形态学的道路中心线提取。可以看出,本文方法提取的道路目标很好地表示了原始道路的位置和方向。尽管受树木、建筑物阴影等影响存在个别位置错误,但提取目标和原始目标之间的位置基本符合,提取出的道路非常接近原始图像上的道路。而未结合LiDAR数据提取的道路中心线完整性非常差。

3.2 精度分析
以遥感图像提取道路的识别精度、遗漏误差、冗余误差作为评价因子来评价提取结果。这3个参数的计算公式如下:

这里,遗漏的道路是错误地被识别为背景的道路,错分的道路是被错误地定义为道路的一部分背景。道路的总长度是指真实的道路网总长度,真实的道路网利用一种更精确的方法从原始图像中测量。统计结果见表1~表3。

表1 基于数学形态学提取的道路信息

表2 结合LiDAR数据和高分辨率遥感影像提取的道路信息

表3 2种方法道路提取精确度的统计信息/%
3.3 结果分析
观察表3可得,利用数学形态学从遥感图像中提取道路的识别精度为30.48%,遗漏误差为55.79%,错分误差只有4.17%;而利用LiDAR数据和高分辨率遥感影像提取道路信息的识别精度达到98.35%,遗漏误差只有2.28%,错分误差为18.44%。对比表1和表2也可以看到,综合利用LiDAR数据和高分辨率遥感影像的道路提取方法,正确识别的道路长度是利用数学形态学方法正确识别的道路长度的3倍还要多。
从实验可以发现,针对道路信息的识别精度,基于机载LiDAR和高分辨率遥感影像的道路提取方法比数学形态学方法有很大提高;同时,数学形态学方法有较高的遗漏误差,而基于机载LiDAR和高分辨率遥感影像的道路提取方法有较高的错分误差。这是因为,利用数学形态学方法主要提取的是城市主干道路,它们在遥感影像上所占的像素一般较宽,部分宽度较窄的道路被遗漏;而基于机载LiDAR和高分辨率遥感影像的道路提取方法的识别精度主要取决于前期的基于LiDAR数据的建筑物信息的提取精度和基于高分辨率遥感影像的植被信息的提取精度,若把建筑物信息或植被信息错误地识别为道路,则易造成错分误差。从叠加图中可以看出,基于机载LiDAR和高分辨率遥感影像的道路提取方法提取出来的错误道路大多分布于图像边缘,原因是该方法没有利用道路的几何特征,易把边缘地物错分为道路。
4 结 语
本文综合利用徐州市的LiDAR点云数据,提出了机载LiDAR和高分辨率遥感影像相结合的道路信息提取方法,并通过形态学相关算法实现了道路中心线的最终提取。实验表明,将机载LiDAR数据与高分辨率遥感影像结合进行特定地物目标的提取,在GIS空间数据库更新、自动制图、车载导航、旅游交通图更新、数字三维城市构建等领域有良好的研究前景。
[1]史文中,朱长青,王昱.从遥感影像提取道路特征的方法综述与展望[J].测绘学报,2001,30(3):257-262
[2]田正杰.高分辨率遥感影像道路分割与提取算法研究[D].西安:西安科技大学,2009
[3]李光耀,胡阳.高分辨率遥感影像道路提取技术研究与展望[J].遥感信息,2008(1):91-95
[4]张宏伟.矢量与遥感影像的自动配准[D].武汉:武汉大学,2004
[5]邓非.LiDAR数据与数字影像的配准和地物提取研究[D].武汉:武汉大学,2006
[6]郑丽,潘建平.基于数学形态学的遥感图像道路提取[J].铁道勘察,2010(1):12-15
[7]Zhu C,Shi W,Pesaresi M.The Recognition of Road Network from High-resolution Satellite Remotely Sensed Data Using Image Morphological Characteristics [J].International Journal of Remote Sensing,2005,26(24):5 493-5 508
[8]左娟.基于数学形态学的高分辨率遥感影像城市道路提取[D].南昌:江西理工大学,2009
猜你喜欢
水电站机电技术(2022年4期)2022-04-18
雷达学报(2020年3期)2020-07-13
中国继续医学教育(2015年2期)2016-01-06
中外医疗(2015年5期)2016-01-04
太空探索(2015年8期)2015-07-18
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
浙江大学学报(工学版)(2015年1期)2015-03-01
航天返回与遥感(2014年4期)2014-07-31
振动、测试与诊断(2014年6期)2014-03-01
现代检验医学杂志(2014年1期)2014-02-06