具有V2G功能的电动汽车快速充放电方法
2014-09-27 09:33程启明白园飞
电力自动化设备 2014年2期
吴 凯,程启明,李 明,白园飞,陈 根
(上海电力学院 自动化工程学院,上海 200090)
0 引言
电动汽车 EV(Electric Vehicle)清洁、环保、节能,成为未来新能源汽车发展的主要方向,也是解决全球能源紧缺和环境污染问题的有效途径[1-2]。电动汽车和电网互动技术V2G(Vehicle to Grid)是现代智能电网和智能微电网的重要组成部分,可以调节电网峰谷差,降低电网传统调峰、调频的备用容量,还有利于电网大量吸纳可再生能源发电量,提高电网运行的稳定性和经济性[3-4]。可逆充放电机是电动汽车和电网实现能量双向流动的载体,主要由可逆PWM整流器和双向DC/DC变换器组成,研究其高功率因数快速充放电对实现V2G功能具有重要意义。
三相电压型PWM整流器具有网侧电流谐波低、单位功率因数及高恒定直流侧电压等优点[5-6],得到了广泛关注。文献[7]提出一种基于SVPWM的直接电流控制方法,实现电动汽车的高功率因数充电;文献[8]提出一种通过施加恒定扰动来抑制起动瞬间网侧电流冲击的方法,并提出利用q轴电流给定不为0的方法来校正整流器的功率因数;文献[9]提出在同样的谐波要求下,相对纯电感型滤波,LCL滤波可以降低电感值的大小。对双向DC/DC变换器的研究集中在电路拓扑[10-11]和控制[12-14]2 个方面。 要实现电动汽车的快速充放电,必须解决动力电池的极化问题[15],文献[16]提出采用脉冲电流充电,适时进行反向放电,消除电池的极化现象。
本文将可逆PWM整流器和双向DC/DC变换器应用到电动汽车快速充放电技术中,对可逆PWM整流器采用前馈解耦的电压电流双闭环控制策略,有效地提高了充电机的功率因数,保持充放电过程中直流母线电压的稳定;同时用LCL滤波器代替L滤波器,在达到相同滤波效果的前提下降低了电感值,提高了系统的响应速度。对双向DC/DC变换器采用电流闭环控制,并对充放电分别采用脉冲充电和恒流放电,有效地控制了充放电的电流,实现快速充放电功能。
1 可逆充电机的工作原理
非车载式可逆充电机主要包括可逆PWM整流部分、双向DC/DC变换部分、动力电池以及电池管理系统 BMS(Battery Management System),充电整体结构如图1所示。根据BMS对动力电池剩余电量的监测,设定不同的充放电运行模式,实现充电机潮流双向流动。充电时,从电网接入交流电由整流装置转换为稳定的直流电压,再经DC/DC变换装置降压后给动力电池充电;放电时,动力电池经DC/DC变换装置升压后逆变为交流电接入电网。

图1 充电机整体框图Fig.1 Overall diagram of charger
1.1 可逆PWM整流器
可逆PWM整流器由基于LCL滤波的三相电压型PWM整流器组成,既是电动汽车充电时的供电电源,又是电动汽车放电时的负载,且在电池的充放电过程中,具有单位功率因数、电能双向流动、低谐波污染等优点。主电路拓扑结构如图2所示,图中,ea、eb、ec为电网三相交流电压;ia、ib、ic为三相交流电流;Udc和Idc分别为直流侧电压和电流;Lg和L分别为网侧电感和整流侧电感;Cf和C分别为滤波电容和直流侧电容;Rd为阻尼电阻。
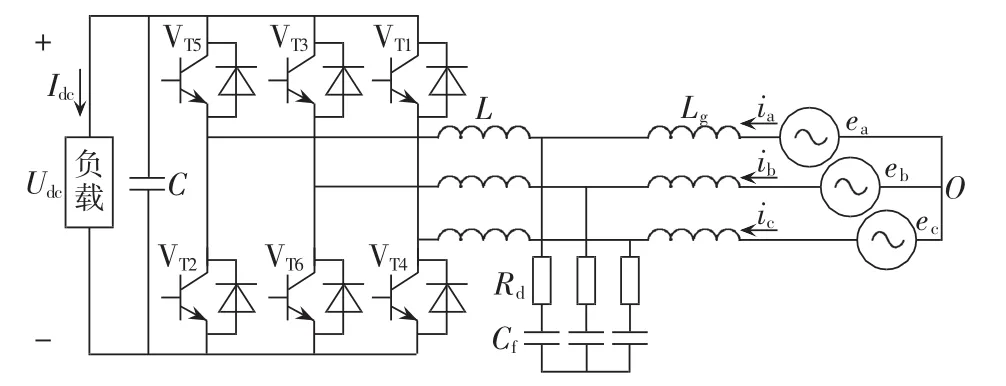
图2 LCL滤波的PWM整流器拓扑结构图Fig.2 Topology of PWM rectifier with LCL filter
在相同滤波条件下,采用LCL滤波比采用单L滤波使用更小的电感值[9],且在低频情况下,LCL滤波器可以等效为L滤波器,等效电感LT=L+Lg。忽略滤波电容Cf,在以电网电压定向的同步旋转坐标系下,PWM整流器其数学模型为:

其中,ud、uq分别为整流器交流侧电压矢量的d、q分量;id、iq分别为整流器交流侧电流矢量的d、q分量;ed、eq分别为交流电源电压矢量的d、q分量。
1.2 双向DC/DC变换器
Buck-Boost双向DC/DC变换器结构简单、可靠性高,易实现电压的双向控制,能满足电动汽车V2G的功能,拓扑结构如图3所示。

图3 双向DC/DC变换器拓扑结构图Fig.3 Topology of bi-directional DC/DC converter
电动汽车充电时,双向DC/DC变换电路由开关管VTbuck、VDbuck和电感L构成,工作在Buck模式。充电回路的电压基尔霍夫方程如下:

由此可得充电回路的传递函数为:

其中,Udc为输入电压;Ubat为电池充电电压;iL为充电电流;Rbat为电池内阻;L为滤波电感;τl为电磁惯性时间常数。
充电回路的动态结构模型如图4所示。

图4 充电回路的动态结构Fig.4 Dynamic structure of charging loop
放电时,DC/DC变换电路由开关管VTboost、VDboost和滤波电感L构成,变换器工作在Boost模式。放电回路的电压基尔霍夫方程如下:

放电回路的传递函数为:

2 电动汽车充放电控制策略
2.1 PWM整流器控制策略
由式(1)可以看出d、q轴变量相互耦合,为此提出基于PI调节器的前馈解耦控制策略并采用双闭环控制系统。采用基于PI调节器的前馈解耦控制策略时,u*d、u*q控制方程为:

其中,KiP、KiI为电流内环比例调节增益和积分调节增益;u*d、u*q为电压指令值;i*d、i*q为电流指令值。
解耦后系统的结构框图如图5所示。

图5 基于前馈解耦控制策略的控制结构Fig.5 Structure of feedforward decoupled control
按典型二阶系统对电流内环PI参数设计[8],将解耦后电流内环小惯性环节进行合并,d轴和q轴的电流内环PI参数相同。电压外环PI参数设计与电流内环类似,电流内环和电压外环的PI参数分别如下:
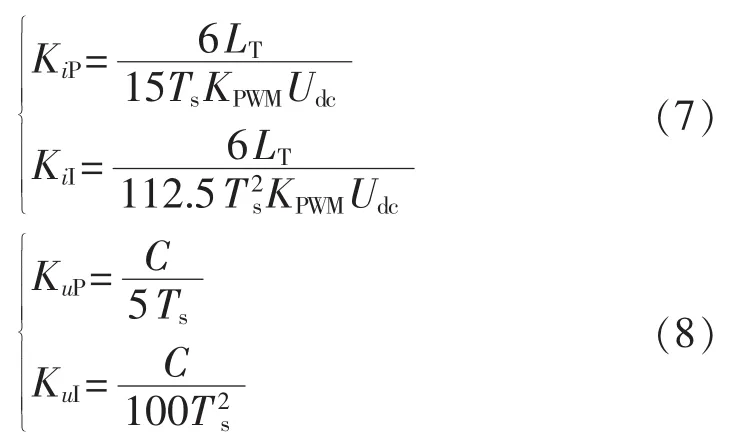
其中,Ts为开关周期;KPWM为PWM单元的增益;Udc为直流侧电压。
2.2 双向DC/DC变换器的控制策略
双向DC/DC变换器在不同的工作模式下对应的控制策略也不相同。本文是要控制充电和放电电流,因此在充放电过程中都采用电流闭环控制。为消除被控量的稳态误差,采用PI调节器,控制结构如图6(a)所示。图中,Ks是开环增益;τoi是电流滤波时间常数。
根据电动汽车的常用动力电池-锂电池组的特性,本文选择脉冲式快速充电方法对电动汽车进行充电,放电时采用恒定大电流快速放电方法。脉冲充电使用间断的电流充电,充电过程中有瞬时电流放电,提高了电池的接受能力,排除了极化现象,缩短了充电时间,提高了充电效率[16];恒定大电流快速放电提高了电动汽车瞬间向电网供电的能力,可用于电力系统的调峰和调频。充放电的控制框图如图6(b)和 6(c)所示。

图6 双向DC/DC控制结构Fig.6 Structure of bi-directional DC-DC control
3 仿真结果分析
使用MATLAB/Simulink作为本文的仿真工具,选择SimPowerSystem中自带的锂电池作为电动汽车的动力电池,建立仿真模型。根据电动汽车动力电池的要求,设置锂电池的标称电压为150 V,电池容量为100 A·h,充放电均采用大电流(0.3 C,即30 A,C为电池充放电倍率)方式进行。
3.1 充电仿真
充电时可逆PWM整流器工作在整流状态,电网侧电压、电流及功率波形如图7所示。从图7中可以看出网侧电流和电压保持同相位,有功功率从电网流向电池,无功功率为0,实现功率因数为1,且采用LCL滤波使电流谐波畸变保持在3%以下。
双向DC/DC变换器工作在降压模式,电池的充电电压、充电电流如图8所示。采用基于电流闭环控制的脉冲充电方式,充电电流保持在0 A和35 A这2个状态,充电电压随着充电时间的增长逐渐脉冲式增大。
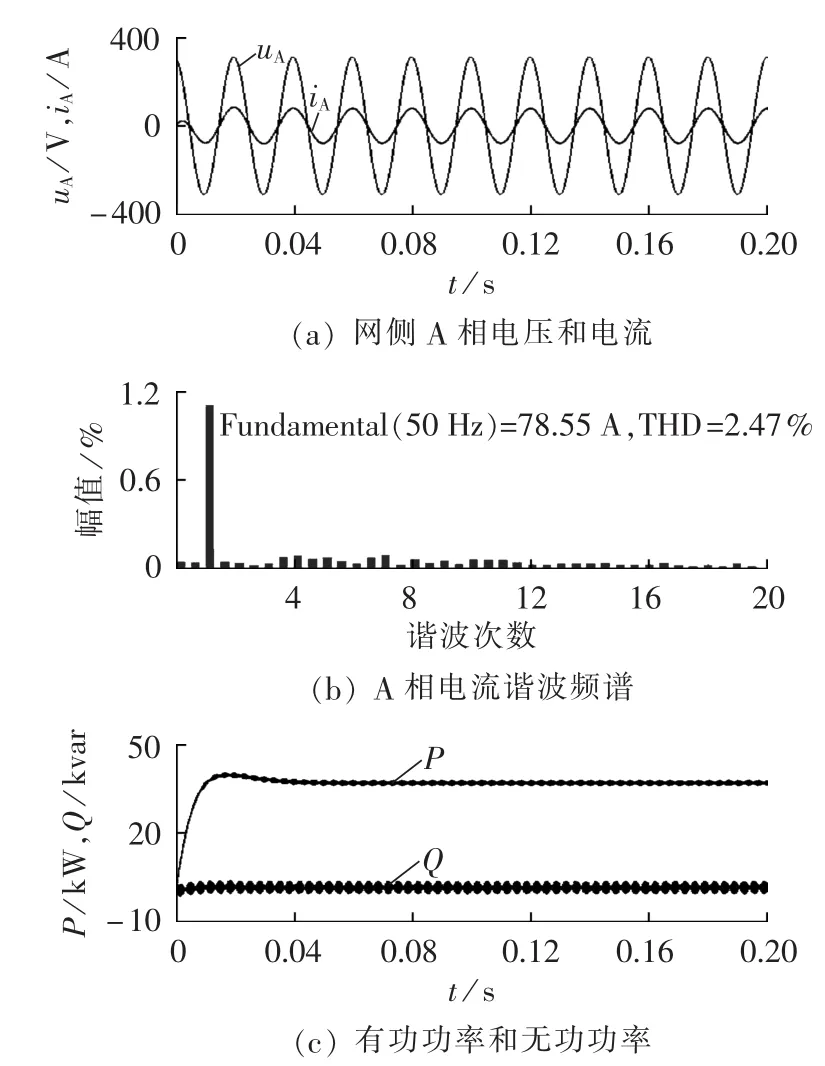
图7 PWM整流器波形Fig.7 Waveforms of PWM rectifier

图8 电池充电波形Fig.8 Waveforms of battery charging
为验证本文所提脉冲充电方法的快速性,又对恒流和恒压2种充电方法进行对比仿真。设置3种充电方式的电池初始值相同,电池的荷电状态SOC(State Of Charge)随时间的变化如图9所示。可以看出,脉冲充电速度最快,其次是恒流充电,而恒压充电速度最慢。
3.2 放电仿真
放电时,电动汽车动力电池通过电压提升后输入到可逆PWM整流器,双向DC/DC变换器部分的仿真结果如图10所示。放电电流保持在35 A不变,电池SOC线性下降,放电电压经过DC/DC变换器提升后迅速达到稳定值,保证了逆变器的输入电压。
放电时PWM整流器工作在逆变状态,波形如图11所示。可以看出,网侧电压和电流相位相差180°,有功功率从电池流向电网,无功功率为0,实现功率因数为-1,同时网侧电流谐波畸变率仅为2.59%。

图9 SOC变化Fig.9 Waveforms of SOC

图10 电池放电波形Fig.10 Waveforms of battery discharging


图11 PWM逆变器波形Fig.11 Waveforms of PWM inverter
4 结论
本文建立了具有V2G功能的电动汽车充放电机模型,将可逆PWM整流器和双向DC/DC变换器应用到电动汽车快速充放电技术中。可逆PWM整流器选择基于LCL滤波的三相电压型PWM整流器的拓扑结构,采用前馈解耦的电压电流双闭环控制策略,实现充放电的功率因数为±1,把网侧电流谐波畸变率控制在3%以下,同时保证直流母线电压快速稳定。双向DC/DC变换器采用电流闭环控制,并对充放电分别采用脉冲充电和恒流放电,有效地控制了充放电的电流,实现快速充放电功能。仿真结果表明,网侧电流谐波小,功率双向流动,且功率因数近似达到±1,系统动态响应快,控制方法简单且易于实现。
猜你喜欢
新能源汽车供能技术(2021年1期)2021-10-14
科学家(2021年24期)2021-04-25
自动化学报(2019年12期)2020-01-19
电子制作(2019年23期)2019-02-23
测控技术(2018年9期)2018-11-25
电子制作(2017年19期)2017-02-02
电子制作(2016年1期)2016-11-07
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
燕山大学学报(2015年4期)2015-12-25