
新型解析冗余关系法在传感器故障诊断中的应用*
2014-09-25 08:15帕孜来马合木提董小亮廖俊勃
传感器与微系统 2014年7期
帕孜来·马合木提, 董小亮, 杨 莲, 廖俊勃
(新疆大学 电气工程学院,新疆 乌鲁木齐 830049)
0 引 言
连续生产过程,如,石油炼制、化工、电力、钢铁、冶金等行业,它们的生产环境通常处于高温高压或低温真空等极端条件,如,操作不当,疏于检测或因不可抗拒的自然界因素,时有生产中断、爆炸、泄漏毒气的危险。生产系统的安全性和可靠性越来越重要,而适当及时的故障诊断是保证系统安全性和可靠性关键技术。多容水箱系统是较为典型的大惯性、大时延、非线性对象,工业上许多被控对象的整体或局部都可以抽象成多容水箱系统的数学模型,具有很强的代表。
针对三容水箱,李智等人[1]提出了基于实验的三容水箱数学模型,在实验的基础上推导出了三容水箱的传递函数模型,并在Simulink上进行仿真验证该传递函数模型的正确性;赵科等人[2]提出了三容水箱的机理建模,按照系统运动的机理和规律建立数学模型,并分析了线性和非线性阻力板的流量特性,给出了三容水箱的线性化模型,但传递函数本身存在难以克服的局限性。
文献[3]提出了利用键合图的因果路径实现故障的检测与隔离。文献[4]提出了诊断键合图法,利用检测信息、物参以及源信号在线实时的计算残差以实现故障检测与隔离。文献[5]提出了利用键合图与扩展模型对三容水箱系统进行监督和管理。
本文针对三容水箱系统探讨了一种新型解析冗余关系(analytical redundancy relation,ARR)法应用于传感器的故障诊断中,这种方法就是利用键合图建模优势,建立三容水箱系统的诊断键合图产生残差,得到系统故障特征矩阵。
通过仿真来验证该方法在传感器故障检测与隔离应用中的有效性。该方法模型直观、易于获取系统的故障特征。
1 故障检测与隔离
1.1 多容水箱系统故障分类
在多容水箱系统中,按照故障发生部位的不同可分为[6]:
1)元部件故障:指被控对象中的某些元部件、甚至是子系统发生异常,使得整个系统不能正常完成即定的功能,如管道堵塞和水箱漏水故障会对多容水箱系统的液位控制的动态响应造成影响。
2)传感器故障:指控制回路中用于检测被测量的传感器发生卡死、恒增益变化或恒偏差而不能准确获取被测量信息,如水箱液位传感器故障会影响控制器的输入降低控制器的控制效果。
3)执行器故障:指控制回路中用于执行控制命令的执行器发生卡死、恒增益变化或恒偏差而不能正确执行控制命令,如水泵发生故障会使系统达不到控制要求。
1.2 新型ARR法
键合图[7]对功率流描述上的模块化结构与系统本身各部分物理结构及各种动态影响因素之间具有明确而形象的一一对应关系,这套理论和规则准确描述了功率系统中能量的贮存、转换、消耗现象,它是美国MIT的Paynter H M于1961年定义的,后经Karnopp D C于1975年和Rosenberg R C于1983年将其逐步发展、完善和推广。
基于解析模型的故障诊断是通过将被诊断对象的可测信息和由模型表达的系统先验信息进行比较,从而产生残差,并对残差进行分析和处理来实现故障诊断的技术。以残差为特征的解析法通常称为ARR法。在系统无故障情况时,残差等于零或在某种意义下近似为零;而当系统中出现故障时,残差会明显偏离零点[8]。利用键合图这一建模工具来产生残差,即建立系统的诊断键合图模型,将被监控系统的已知变量(如,传感器测量信号、源变量以及元件参数)作为输入,残差作为输出。
获取残差步骤:1)转换系统键合图模型中传感器模型的因果关系;2)将传感器测量信号作为已知的外部顶点,并设定为势(流)源输入;3)加入虚拟的势传感器和流传感器,并进一步对键合图模型进行转换,得到诊断键合图模型。
键合图中的虚拟势传感器的转换方法[9]如图1所示。

图1 可转换检测器的置换
1.3 故障特征的提取
故障特征提取的关键是ARR的建立,ARR是从系统模型中得到的仅包含观测变量的约束关系,ARR可以通过剔除系统模型的未知变量而得到[10],然后根据ARR式构造故障特征矩阵。
2 传感器故障诊断实例仿真
2.1 诊断键合图模型
如图2所示,THJ—2型高级过程控制系统实验装置中的水箱被控对象,该系统的三容水箱是由上、中、下3个圆柱体水箱串联组成的被控对象、差压变送器、控制器、电动调节阀和水泵组成。
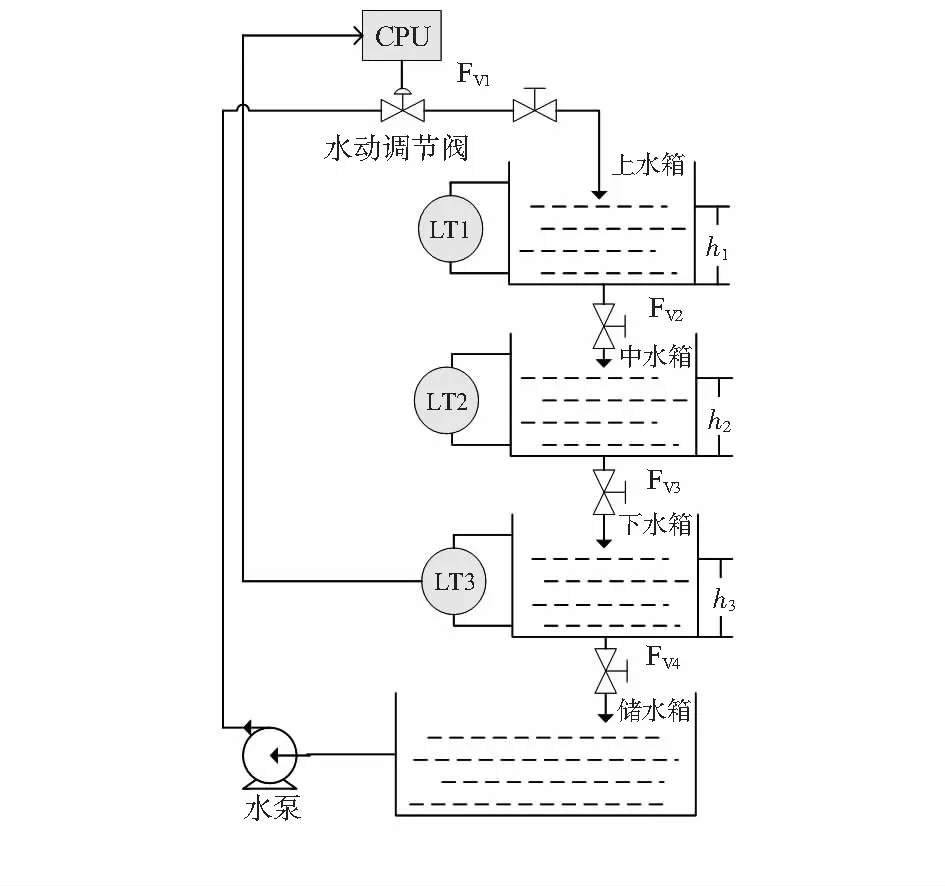
图2 串联三容水箱液位控制系统结构示意图
由键合图理论建立串联三容水箱系统的键合图模型如图3所示。

图3 串联三容水箱的键合图模型
在三容水箱系统中,假设水箱的液面高度为系统的检测器输出:mei=hi(t),i=1,2,3。根据诊断键合图理论,得到系统的诊断键合图模型如图4所示。
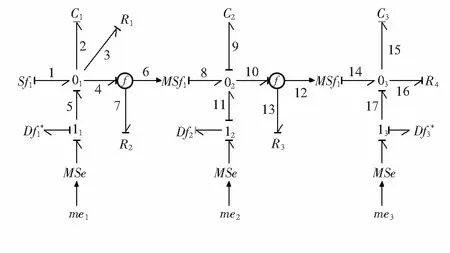
图4 系统诊断键合图模型
2.2 ARR
根据图4所示的诊断键合图模型,得到系统的结构方程如表1所示。
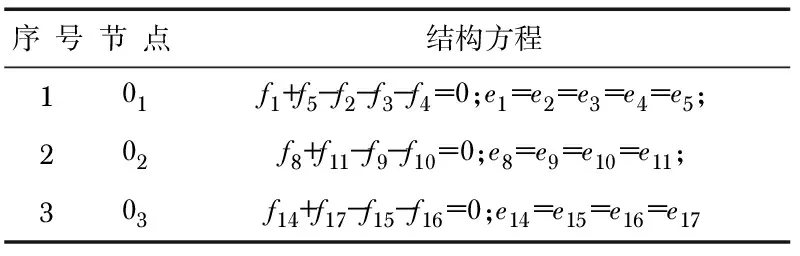
表1 诊断键合图的结构方程
(其中,Ri表示管道的阻力;Ci表示水箱的水容量;Sf表示水泵的流速;fi,ei为键合图的流和势变量。)
对于节点01的结构方程,根据键合图元元件的静态函数关系,则残差r1可写作
这个方程表明:残差r1对元件参数(Sf,C1,me1,R1和R2)变化敏感。
对于节点02的结构方程,得到残差r2如下
可以看出:残差r2对元件(R2,me1,me2,C2和R3)变化敏感。
对于节点03的结构方程,推出残差r2为
可知,残差r3对元件参数(R3,me2,me3,C3和R4)变化敏感。
2.3 故障特征矩阵
对于连续系统,残差r1对于那些元件的参数在ARR中的故障非常敏感,这就推出当系统无故障时每个残差的值是零或|rl|(其中|rl|小于一个小的阈值εl)。为了运用残差集合来进行故障检测与隔离,定义一个二进制的相干向量C=[c1,…,cm],每个元件C的cl由以下规则获得
在三容水箱系统中,可能发生的故障类型有管道堵塞、水箱泄漏、传感器故障、执行器故障,并假设为单一故障,则可设系统的故障集合F={FT i,FV j,FY k,FS l}(其中,i=1~3,j=1~4,k=1,l=1~3,Ti分别表示上、中和下3个水箱;Vj分别表示电动调节阀、上水箱、中水箱、下水箱和储水箱两两之间的的管道;Yk表示水泵;Sl分别表示3个水箱的液位传感器;FT i表示第i箱泄漏故障;FV j表示管道堵塞故障;FY k表示执行器故障;FS l表示传感器故障)。
根据ARR可以建立如表2所示的故障特征矩阵,表中的行表示对应故障元件的二进制特征向量C,Db表示故障的可检测性,Ib表示故障的可隔离性。当Db=1时,表明该故障是可检测的;当Ib=1时,表明该故障是可隔离的。表中的每一个元的正负号表示当发生某故障时,对应列的残差变化方向。
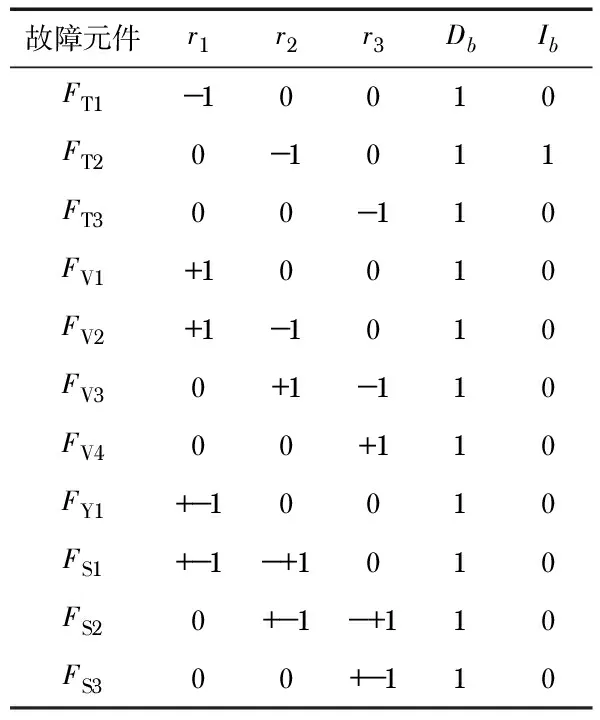
表2 带有方向的故障特征矩阵
2.4 三容水箱系统故障特征的仿真
本文以三容水箱液位控制系统为研究对象,在键合图仿真软件20—sim中模拟系统在发生故障时的综合仿真模型如图5所示。
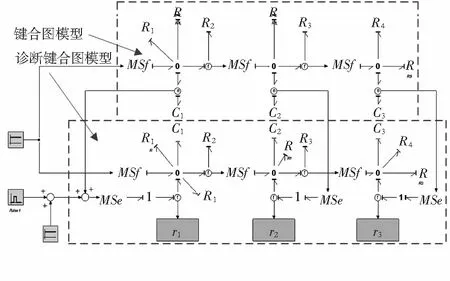
图5 系统综合仿真模型图
图5中上半部分是对三容水箱系统的键合图模型,模拟三容水箱的阶跃响应。水箱漏水、管道堵塞、执行器以及传感器恒偏差故障,采用脉冲信号和定值信号叠加来模拟;图中下半部分是诊断键合图模型,把三容水箱的3个液位传感器的检测输出作为诊断键合图的外部顶点输入,3个残差r1,r2,r3作为其输出。
系统部分故障发生时的特征值计算结果输出仿真图(仅考虑传感器与执行器故障),如图6所示。
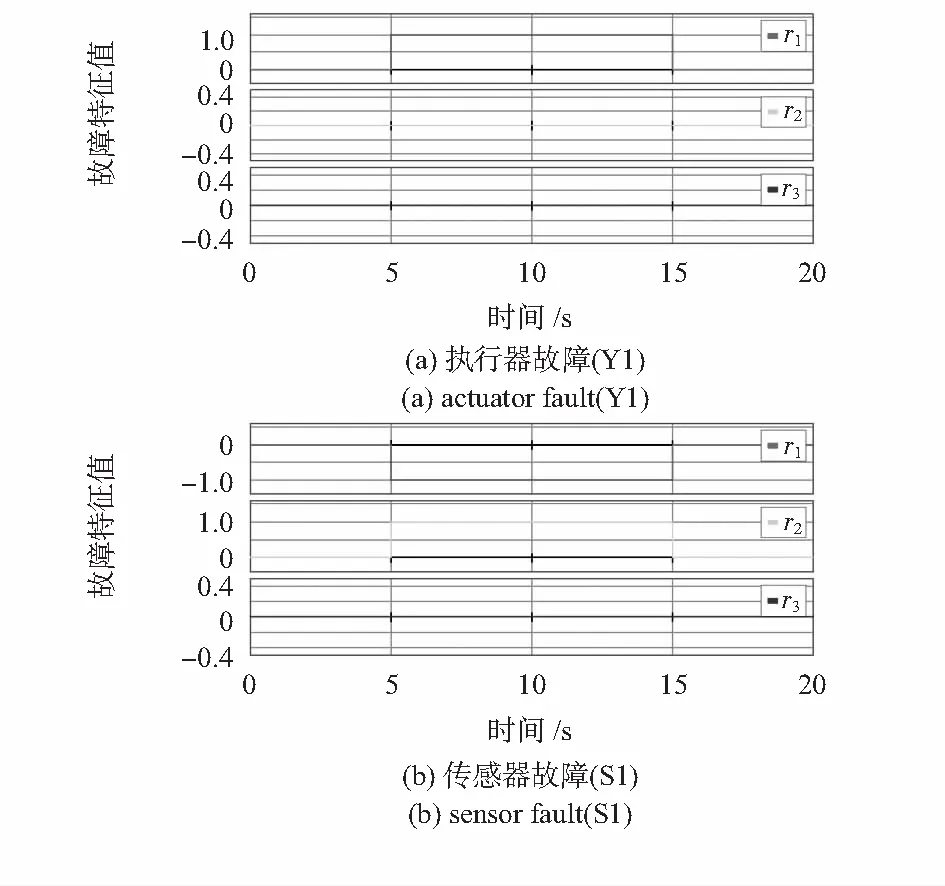
图6 三容水箱故障特征值仿真图
从系统的故障特征矩阵得到,传感器S1发生故障的故障特征值[r1r2r3]=[+-1 -+1 0],传感器S1恒偏差失效可以表示为:yout(t)=yin(t)+Δi,其中,Δi为常数,当偏差Δi>0时,[r1r2r3]=[-1 +1 0];当偏差Δi<0时,[r1r2r3]=[+1 -1 0]。若只考虑传感器故障和执行器故障,则传感器故障FS1是可隔离的。图6中(b)图描述的是系统在5~15 s时,传感器S1发生恒偏差故障且偏差Δi>0,得到在0~20 s之间故障特征值[r1r2r3]的变化曲线。由故障特征值仿真曲线可以得出:当传感器S1发生故障时,[r1r2r3]=[-1 +1 0]。这个结果表示在传感器S1发生故障时,[r1r2r3]的值与该故障元件在故障特征矩阵下的故障特征向量一致。
图6(a)设定在5~15 s执行器Y1也就是水泵发生故障时的故障特征值仿真图。
在生产过程中,可以利用这一套理论化方法对生产过程中的设备元件进行故障检测与隔离。利用生产过程中的观测变量的输入到诊断键合图模型中计算出残差,当残差小于某一个阈值时,可认为观测变量的输出是满足ARR的残差大于某一个阈值时可以为观测变量的输出是不满足的,这时就可以判断系统发生了故障,然后根据诊断键合图输出的残差值进行查故障特征矩阵表对故障进行定位。
3 结束语
本文主要研究了串联三容水箱系统传感器故障检测与隔离,设计建立了串联三容水箱系统键合图模型、诊断键合图模型,并利用故障发生的特点,在20—sim键合图仿真软件中搭建了诊断模型,仿真验证了该理论在传感器故障检测与隔离方面是切实可行的。
参考文献:
[1] 李 智,张雅婕,杨 洁.基于实验的三容水箱数学模型[J].武汉工程职业技术学院学报,2009,21(3):1-4.
[2] 赵 科,王生铁,张计科.三容水箱的机理建模[J].控制工程,2006,13(6):521-539.
[3] Tagina M,Cassar J P,Dauphin-Tanguy G,et al.Monitoring of systems modelled by bond-graphs[J].Simulation Series,1994,27:275-275.
[4] Samantaray A K,Medjaher K,Ould Bouamama B,et al.Diagnostic bond graphs for online fault detection and isolation[J].Simulation Modelling Practice and Theory,2006,14(3):237-262.
[5] Abderrahmene S,Nadia Z,Mekki K,et al.Supervision of a three tanks system by bond graph and external models[C]∥2011 International Conference on Communications,Computing and Control Applications (CCCA),IEEE,2011:1-6.
[6] 陈玉东,施颂椒,翁正新.动态系统的故障诊断方法综述[J].化工自动化及仪表,2001,28(3):1-14.
[7] 王中双.键合图理论及其在系统动力学中的应用[M].哈尔滨:哈尔滨工程大学出版社,2007:1-47.
[8] Patton R J.Robustness in model-based fault diagnosis :1995 Situation[J].Annual Reviews in Control ,1997 ,21 :103-123.
[9] 王秋生.诊断键合图在动态系统故障诊断中的应用[J].汽轮机技术,2007,49(3):210-214.
[10] Low C B,Wang D,Arogeti S,et al.Monitoring ability analysis and qualitative fault diagnosis using hybrid bond graph[C]∥Proceedings of the 17th World Congress,2008:10516-10521.
猜你喜欢
网络安全与数据管理(2022年3期)2022-05-23
北京航空航天大学学报(2020年10期)2020-11-14
自动化学报(2019年6期)2019-07-23
测控技术(2018年12期)2018-11-25
制造技术与机床(2017年9期)2017-11-27
电子制作(2017年19期)2017-02-02
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16
工业设计(2016年11期)2016-04-16
小雪花·成长指南(2015年10期)2015-10-23
