
分布式MIMO雷达的低截获特性分析
2014-09-21 01:33:20赵宜楠亓玉佩赵占锋周志权
哈尔滨工业大学学报 2014年1期
赵宜楠,亓玉佩,赵占锋,周志权
(哈尔滨工业大学(威海)信息与电气工程学院,264209山东威海)
随着现代电子支援措施(ESM)和反辐射导弹技术(ARM)的发展,雷达的生存环境日趋恶劣,低截获概率(LPI)特性逐渐成为现代雷达所必须具备的性能.然而LPI特性一般针对特定的ESM截获接收机或特定的目标而言,很难具备普适性.例如,对于舰船目标,Philips实验室开发的“Pilot”雷达具有LPI特性,然而对于飞机类目标则几乎没有LPI特性.为了寻找实现LPI特性的方法,文献[1]以单基地调频连续波雷达为例提出了低截获策略,分析了未来ESM截获接收机的发展趋势以及雷达系统在LPI特性上的潜在发展方向.其中,双基地雷达由于可以有效解决发射机信号向接收机泄露的问题,能够采用连续波或准连续波体制,因此在LPI特性方面具有明显的优势[2].目前,组网雷达以及MIMO雷达技术日趋成熟,相对于覆盖一个大范围的单基地雷达,用多个小型雷达组网来覆盖相同的区域,往往能够获得更好的检测能力[3].由于分布式MIMO雷达直观上与组网雷达非常相似,可以将其视为一种特殊的组网雷达,它的空间分集特性能够获得更多的目标RCS信息,从而能有效地抑制目标闪烁[4].文献[5]系统地分析了组网雷达的灵敏度、模糊函数及地平面效应,这也为分析组网雷达的LPI特性奠定了基础.
在分析雷达系统的LPI特性时,一般采用距离因子α作为定量分析参数[6].鉴于距离因子α是针对单基地雷达所提出的参数,不适用于分析双基地及组网雷达系统,本文在此基础上推导出能够定量分析组网雷达LPI特性的参数,并分析了影响分布式MIMO雷达LPI性能的因素.
1 双基地及组网雷达LPI参数模型
1.1 双基地雷达的LPI性能参数
衡量雷达系统LPI性能的关键是对比雷达系统自身的探测范围与ESM截获接收机的截获范围.对于双基地雷达系统,敌方截获接收机只能截获发射机信号,因此发射机到目标的距离RTr直接与系统的LPI性能有关,为此作如下定义:
定义1当系统初次探测到目标时,双基地雷达的LPI性能参数β为

式中RI为ESM截获接收机的最大截获距离.
当β≤1时,截获接收机的最大截获距离小于发射机到目标的距离,发射的信号还未被截获(临界时取等号);当β>1时,截获接收机的最大截获距离大于发射机到目标的距离,发射的信号已经被截获.可以注意到,当RTr等于单基地雷达的最大探测距离时,性能参数β与距离因子α相等,即单基地雷达的情况是双基地雷达的特例.
由双基地雷达方程可得

式中:PCW为发射机的平均功率;Tobs为观测时间;GT为雷达发射增益;GR为接收天线增益;λ为雷达波长;σ为雷达横截面积;k为波尔兹曼常数;T0为标准噪声温度;FR为接收机的噪声系数;SNRRi为所需的最小输入信噪比;RRc为接收机到目标的距离;LR为雷达损耗.
文献[6]给出的ESM截获接收机最大截获距离为

式中:GTI为对截获接收机而言雷达发射机的天线增益;GI为截获接收机天线增益;FI为截获接收机噪声系数;BI为截获接收机等效带宽;SNRI为截获接收机所需的最小输入信噪比;LI为截获接收机的系统损耗.
将式(2)与式(3)带入式(1)中得

由式(4)易知β会随着RRc的减小而减小,即双基地雷达LPI性能在靠近接收机的方向更好一些.因此,双基地雷达LPI性能不仅与雷达参数有关,而且受接收机空间分布的影响.这样就可以根据需要来调整接收机的位置,使系统具有一定的可剪裁性,这种特性在组网雷达中会表现得更加突出.
1.2 组网雷达的LPI性能参数
对于组网雷达系统,通常采用信噪比等值线图来分析其探测范围.与双基地雷达系统一样,直接影响组网雷达系统LPI性能的因素是系统中发射机到目标的距离.正如文献[1]所指出的那样,在讨论LPI特性时有必要做最坏的打算,因此我们规定组网雷达系统保持“静寂”的条件为:系统中任何一个发射机发出的信号都没有被截获.这样,系统的LPI性能就直接与最先被截获的那个发射机到目标的距离RTrWeak有关.沿用双基地雷达LPI性能参数的定义方法作如下定义:
定义2当系统初次探测到目标时,组网雷达的LPI性能参数βNet为

由于组网雷达系统的复杂性,很难直观地求出RTrWeak的值.为了简化分析,可以将组网雷达系统看作是M×N个发射机与接收机的组合,每一对发射机接收机都可以视为一个双基地雷达系统,而每个双基地雷达系统的LPI性能又都可以由性能参数β定量描述.这样就可以选取发射机“TrWeak”以及网络中某个接收机来组成一个双基地雷达系统,然后用参数β代替参数βNet来分析组网雷达的LPI特性.为了充分发挥出组网雷达系统的优势,发射机“TrWeak”与选取接收机组成的双基地雷达系统的β值应该最大,即参数βNet可以由下式表示:

式中:N为网络中接收机的个数,βi为发射机“TrWeak”与网络中第i个接收机所组成的双基地雷达系统的LPI性能参数.
当系统初次探测到目标时,假设系统中每个发射机和接收机的雷达参数都相同,式(6)可以进一步简化为
式中:RTrmin为发射机到目标距离的最小值,即网络中离ESM截获接收机最近的发射机到目标的距离,RTrmin表达式为

式中,RRcmin为接收机到目标距离的最小值,即网络中离ESM截获接收机最近的接收机到目标的距离.
将式(3)与式(8)带入式(7)中得

2 分布式MIMO雷达系统的LPI性能参数
近几年来,MIMO雷达成为研究的热点,文献[7]对MIMO雷达的概念及分类进行了详细地阐述.本文所讨论的分布式MIMO雷达是MIMO雷达中的一类——分布式雷达网络(DRN)[8],它由许多相互分离的发射机和接收机组成.系统中每个发射机发射的波形均来自一个正交码集,在每个接收机中有多个并行的匹配滤波器,每个匹配滤波器都与系统中某个发射机发射的信号相关,这样接收机就能够同时接收系统中多个发射机的发射信号,并分别进行判决,最后再通过通信网络对多个结果进行数据融合[9].图1给出了分布式MIMO雷达系统的拓扑图,从图中可以看出,系统的接收机能够接收到更多的目标回波,从而获得空间分集增益.相对于单基地雷达而言,分布式MIMO雷达系统在检测隐身目标时更具优势,在面对隐身目标正面突防时,由于隐身目标鼻锥方向的RCS非常小,单基地雷达很难在保持LPI性能的同时检测到目标.而由于空间分集增益的存在,即总会有其它方向的回波被MIMO系统捕捉到,所以目标的隐身性能难以维持.在分析MIMO雷达系统的LPI性能时,考虑到空间分集增益,式(9)可进一步改写为
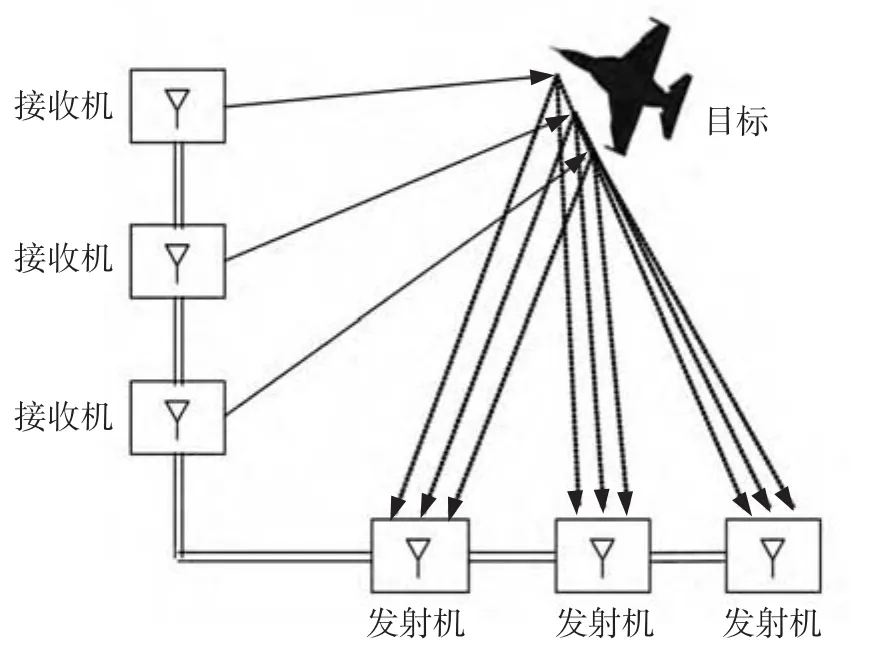
图1 分布式MIMO雷达系统拓扑结构图

式中:Gσ为空间分集增益,σGσ为平均雷达横截面积.需要强调的是,在使用βNet分析系统LPI性能时不要忘记“当系统初次发现目标时”这个条件.
式(10)描述了MIMO雷达系统的LPI性能与各雷达参数之间的关系,因为其中部分参数与单基地雷达系统一致,并且已有文献详细地分析过[6,10], 这里仅分析RRcmin、Tobs以及Gσ对 LPI特性的影响.容易看出,βNet仅与RRcmin的一次幂成正相关,所以接收机的空间分布对MIMO系统LPI性能的影响占主导地位,这一点与双基地雷达类似,但情况却要复杂的多.增加观测时间Tobs显然能够提高LPI性能以及探测范围,但一味地增加Tobs必然会给参数估计带来麻烦,因此在设置参数Tobs时不会有很高的自由度.然而,空间分集增益却是MIMO雷达系统所特有的,并且获得分集增益所要求的条件对于分布式MIMO雷达系统来说通常是满足的.为了充分发挥系统的优势,在设计时应该充分考虑空间分集增益以及发射机与接收机的空间分布,下面将举例分析这两个因素对系统LPI性能的影响.
3 仿真结果及分析
下面将给出在不同空间分布及分集增益的条件下,分布式MIMO雷达系统LPI性能的仿真结果.为了更加贴近实际情况,仿真所使用的雷达系统参数如表1所示.我们假设ESM截获接收机能够截获雷达系统的主瓣,为了获得良好的LPI特性,发射机功率和发射机天线增益应该尽量小,因此这里采用文献[9]中给出的全向LPI雷达的功率和天线增益参数.同时,为了获得较低的发射机平均功率,系统可以采用文献[11-12]介绍的正交线性调频连续波.然而,为了满足所需的探测范围,需要增加观测时间等其它参数.假设观测时间为100 ms,空间分集增益为10 dB,系统的检测门限为13 dB.由于雷达系统的LPI特性都是针对某种ESM截获接收机而言的,这里使用文献[1]给出的信道化ESM截获接收机参数,见表2.
通常可以采用信噪比SNRNet等值线图来分析分布式MIMO雷达系统的探测范围[5].在图2中同时绘制出系统的信噪比等值线图以及βNet的等值线图.可以看出,当ESM截获接收机沿所示方向运动时,雷达系统最早会在A点处发现它,此时读图可知βNet的值大于1,即雷达系统处于劣势地位,无法保持自身“静寂”.此外,还可以看出系统的LPI性能会随着目标进场方向的变化而变化,这种不均匀性正是由发射机与接收机的空间分布所引起的,利用图2可以直观清晰地反应系统的这种特性,将其称为LPI等值线分析图.

表1 仿真使用的MIMO雷达系统参数

表2 仿真使用的ESM截获接收机的参数

图2 分布式MIMO雷达的LPI等值线分析图
图3与图4给出了雷达系统仅在空间分布不同时的LPI等值线分析图.如图3所示,系统在右侧基本可以保持“静寂”,但在左侧的LPI特性极差,而这个结果仅仅是原系统中位于左侧的一个接收机被移动到右侧所引起的.若令系统中发射机和接收机对称分布(如图4),与图2对比可以看出,通过改变空间分布可以使系统基本上具备全方位的LPI特性,通过不同的空间分布可以使系统非常灵活.此外,在实际应用中,雷达系统不一定需要具备全方位LPI特性,在设计系统时只需考虑观测方向是否达到了LPI特性的要求.

图3 系统在不同空间分布时的LPI等值线分析图a
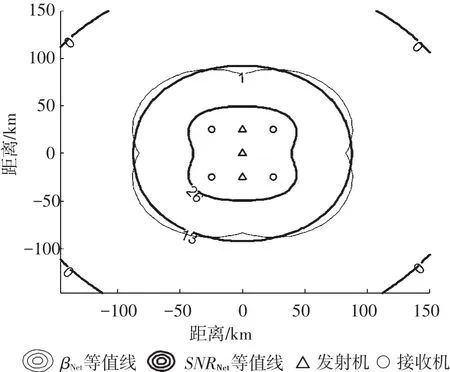
图4 系统在不同空间分布时的LPI等值线分析图b
表3给出了在其它参数不变的情况下,不同的分集增益对探测范围及LPI特性的影响.图5与图6分别给出了在其他参数不变的情况下,空间分集增益为0 dB与15 dB的LPI等值线分析图.通过表3与图5和6可以看出,空间分集增益越大,分布式MIMO雷达的探测范围就越大,同时LPI性能也越好.因此,利用空间分集增益是分布式MIMO雷达系统实现LPI特性的关键.

表3 空间分集增益与探测距离和LPI特性的关系
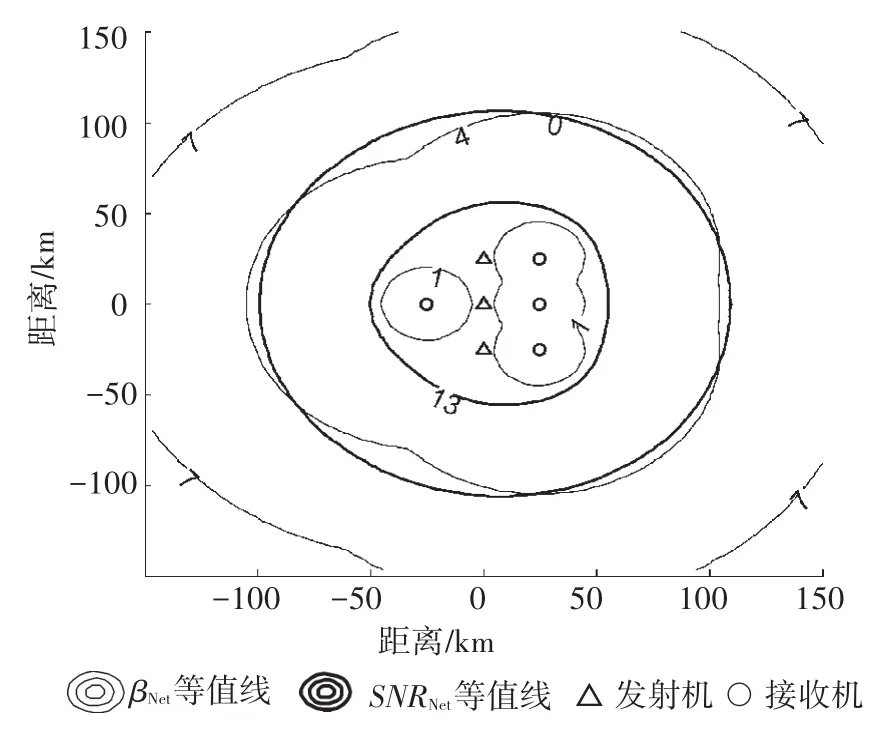
图5 空间分集增益为0 dB时LPI等值线分析图

图6 空间分集增益为15dB时LPI等值线分析图
4 结 论
本文根据距离因子α的定义准则,分别提出了能够衡量双基地与组网雷达LPI性能的参数β及βNet,并通过合理地简化建立起β与βNet之间的关系.在分析分布式MIMO雷达系统的LPI性能时,通过绘制LPI等值线分析图可以直观地表明空间分布与分集增益对LPI性能以及探测范围的影响.仿真结果表明,空间分布对于分布式MIMO系统的LPI特性有十分重要的影响,合理利用可以使系统具有一定的可剪裁性.此外,空间分集增益是MIMO雷达相对于单基地雷达的独特优势,能否充分获得空间分集增益是分布式MIMO雷达实现LPI特性的关键.
[1]STOVE A G,HUME A L,BAKER C J.Low probability of intercept radar strategies [J].IEE Proc Radar Sonar Navig, 2004,151(5): 249-260.
[2]曾维贵,孙迎丰,胥辉旗,等.准连续波体制雷达波形设计与参数选择[J].系统工程与电子技术,2013,35(3):518-521.
[3]BAKER C J, HUME A L.Netted radar sensing [J].IEEE Aerospace and Electronic Systems Magazine,2003,18(2): 3-6.
[4]HAIMOVICH A, BLUM R, CIMINI L.MIMO radar with widely separated antennas [J].IEEE Signal Process, Mag.2008,25(1):116-129.
[5]TENG Yu.Fundamental aspects of netted radar performance[D].London: UCL: Department of Electronic &Electrical Engineering,2010.
[6]LIU Guosui, GU Hong, SU Weimin, et al.The analysis and design ofmodern low probability of intercept radar[C]//2001 CIE International Conference on Rader Proceedings.Beijing, China:IEEE Inc,2001: 120-124.
[7]陈浩文,黎湘,庄钊文.一种新兴的雷达体制-MIMO雷达[J].电子学报, 2012,40(6):1190-1198.
[8]LI Jian, STOICA P.MIMO radar signal processing[M].New Jersey:John Wiley& Sons Inc.,2009.
[9]陈祝明,江朝抒,段锐,等译.低截获概率雷达的检测与分类[M].北京:国防工业出版社,2012.
[10]侯小林,羊彦,高健健,等.雷达低截获概率信号及验证方法[J]西安电子科技大学学报,2012,39(4):184-190.
[11]BABUR G, KRASNOV O A, YAROVOY A, et al.Nearly Orthogonal Waveforms for MIMO FMCW Radar[J].IEEE Transactions on Aerospace and Electronic Systems, 2013,49(3):1426-1437.
[12]ZWANETSKI A, ROHLING H.Continuous wave MIMO radar based on time division multiplexing [C]//13th International Radar Symposium.Warsaw,Poland:IEEE Computer Society, 2012:119-121.
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20 07:23:56
电子制作(2019年19期)2019-11-23 08:41:36
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:37:02
电子制作(2018年19期)2018-11-14 02:36:40
电子制作(2018年9期)2018-08-04 03:31:04
电子制作(2018年12期)2018-08-01 00:48:02
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
西部广播电视(2015年9期)2016-01-18 03:46:07
