
广州珠江城劲性巨柱液压爬模施工设计*
2014-09-20 06:22潘峰
建筑施工 2014年7期
潘 峰
上海建工集团工程研究总院 上海 201114
1 工程概述
1.1 广州珠江城劲性巨柱概况
坐落在广州珠江新城烟草大厦项目的设计独具匠心、个性鲜明,塔楼外部楼线条灵动、多变,是城市标志性建筑物之一(图1)。主塔楼共71 层,地面以上建筑总高度为309.6 m,其结构传力体系主要依靠核心筒和由劲性巨柱、桁架体系为核心的的外围钢框架构成。
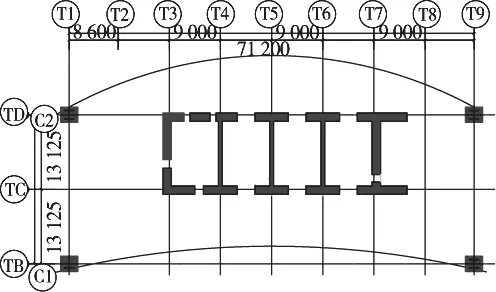
图1 劲性巨柱平面布置
如图1所示的劲性巨柱是由钢结构和钢筋混凝土组成的组合结构。由于其为主要竖向结构传力体系之一,因此采用了强度最高达C70的高强度混凝土,从其截段面可以看出具有尺寸巨大、钢筋排布密集等特点(图2,表1)。
1.2 工程难点
(a)劲性巨柱采用C70和C60高强混凝土,混凝土的泵送难度大。
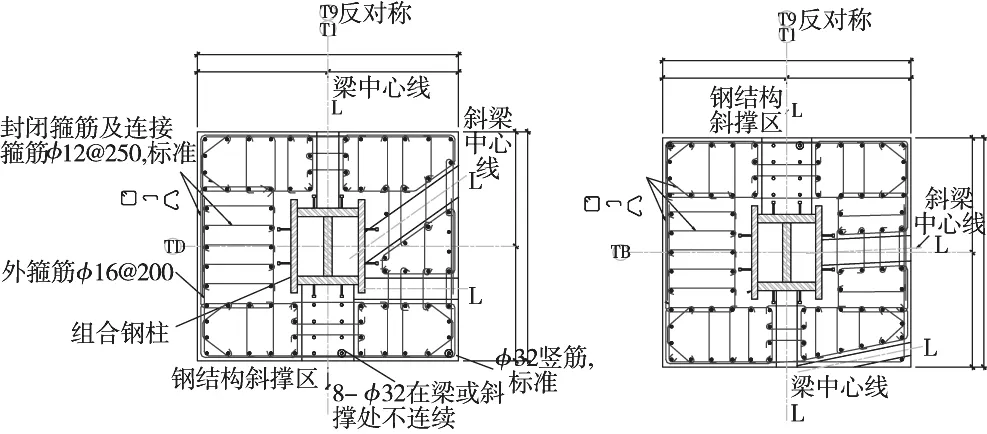
图2 劲性巨柱的截面配筋
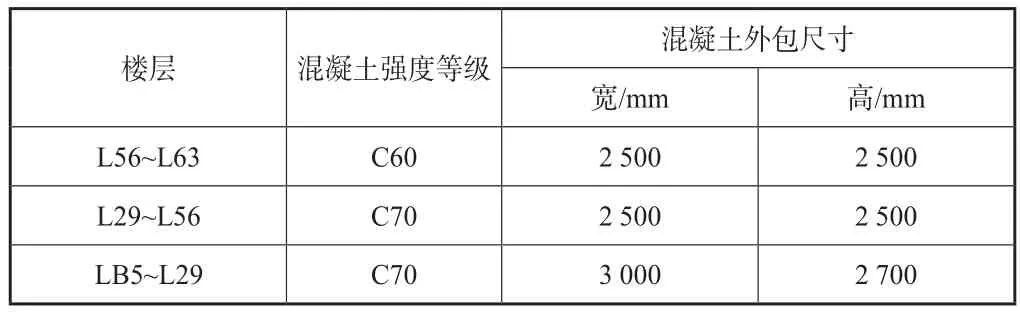
表1 劲性巨柱截面尺寸及混凝土强度
(b)劲性巨柱内含钢结构劲性柱,钢筋密集,混凝土的浇捣难度大。
(c)劲性巨柱和楼层钢梁的连接情况复杂并且纵向不断变化,对劲性巨柱混凝土模板提出了较高要求。
(d)劲性巨柱尺寸大,劲性钢骨柱和密集排布的钢筋增加了模板拉结的难度。
(e)相对独立的巨型柱,对模板操作架和围护脚手架的布置有一定难度。
2 劲性巨柱液压爬模设计[1-4]
2.1 劲性巨柱液压爬模平面布置
根据劲性巨柱的结构特点和施工要求,对4 个劲性巨柱共布置6 组片架式液压爬模系统,其平面布置如图3所示。
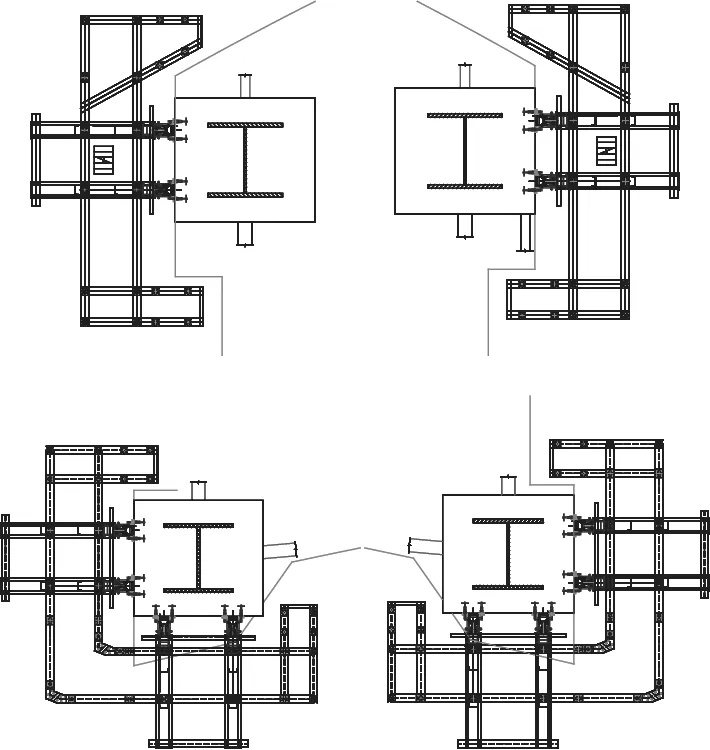
图3 4 个劲性巨柱液压爬模平面布置
2.2 液压爬模的结构组成
液压自动爬升模板系统是一个复杂的系统,集机械、液压、自动控制等技术于一体,其中片架式外爬模主要由以下五大部分构成,如图4所示。
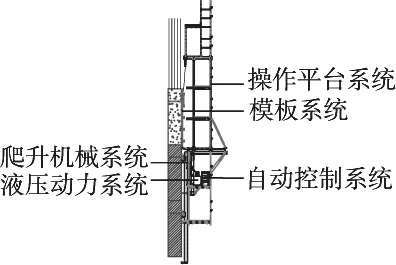
图4 片架式液压自动爬升模板系统构成
2.3 片架式液压爬模的技术要点
2.3.1 劲性巨柱液压爬模的组装
在核心筒施工至第2层时,需要提前埋置定位和固定作用的螺栓;在第3层核心筒剪力墙混凝土浇捣并养护完毕后不再提升模板,承重三脚架挂装在第2层相应位置。然后搁放横连承重梁,分别形成若干单元的操作主平台。片架式爬模系统主结构体系完成之后,依次进行下挂脚手安装,操作架体安装,动力系统安装及周边围护安装等内容。
2.3.2 劲性巨柱变截面收分处理
劲性巨柱截面在标高122.8 m处发生变化,柱截面向内收缩,截面由3 m×2.7 m变为2.5 m×2.5 m。
为此需对片架式液压爬模系统的架体进行相应处理和变化,具体收分的步骤和方法共9 个步骤。
流程一:在收分结构段安装附墙支座及附墙靴(安装时承力螺栓可以不用拧紧,方便导轨插入时对附墙装置进行调整)。
流程二:液压顶升导轨一定高度,至附墙靴下端一定距离,以导轨能够在倾斜时不碰到附墙靴为宜。
流程三:拆除下端附墙装置;在距离导轨底部处内侧面安置手动液压千斤顶(每组爬模两机位同时安装)。
流程四:拔去挂钩安全插销;顶升手动千斤顶,待观察人员确认导轨可插入上端附墙靴后停止;在顶升千斤顶同时,将支撑腿螺杆向墙体内侧旋转。
流程五:待确定支撑腿螺杆顶紧墙体后,松开手动千斤顶;继续顶升导轨到位后插入承重插板;翻转导轨撑墙杆,顶紧墙面。
流程六:液压顶升爬模一定距离,在距导轨底部3.2 m处的内侧面安置手动液压千斤顶。
流程七:顶升手动千斤顶,拆卸下端的附墙装置;将附墙支座重新安装在原来的预埋螺孔处,并安装垫板,将导轨垫紧;同时将支撑腿螺杆顶紧墙面。
流程八:在支撑腿下端导轨内侧垫厚100 mm垫块,收缩手动千斤顶,逐渐向外旋支撑腿螺杆,将爬模慢慢回复至垂直位置;在附墙支座板上安装导轨临时限位卡块。
流程九:继续液压顶升爬模到位后,完成力系转换,进入下一结构段施工流水。
2.3.3 劲性巨柱片架式液压爬模的固定和拆除
液压爬模的固定采用在劲性巨柱壁上预埋H型螺母的方法。H型螺母规格为M30,可重复周转应用,2 个螺母的中心距为380 mm。内埋螺杆一次性埋入消耗,其埋入长度≥40d。埋入焊锚固板。固定螺母的定位通过在模板开孔的方法确定。
在劲性巨柱外包混凝土施工至结构顶面后,需要在高空拆除,拆除需要塔机帮助。拆除按逆组装的步骤进行,其另部件拆至结构层上,成捆后下吊。其爬升机构以组为独立部件利用塔机下吊。
2.4 片架式液压爬模的施工流程
第1步:第N段劲性巨柱结构混凝土浇捣完成并开始养护,第N+1段劲性巨柱结构钢筋开始绑扎;
第2步:当第N段劲性巨柱结构混凝土养护达到要求强度后,将第N段巨柱模板拆除后置于爬升架体之上(图5);
第3步:将爬架附墙装置安装在劲性巨柱第N段上,之后将导轨顶升一个标准层高并固定;
第4步:片架式爬模系统爬升一个标准层高,并进行相应固定和转换(图6);
第5步:将预埋螺栓套筒安装在相应位置,将模板清理、定位并固定;
第6步:浇捣第N+1段劲性巨柱结构混凝土,并进入下一循环施工(图7)。
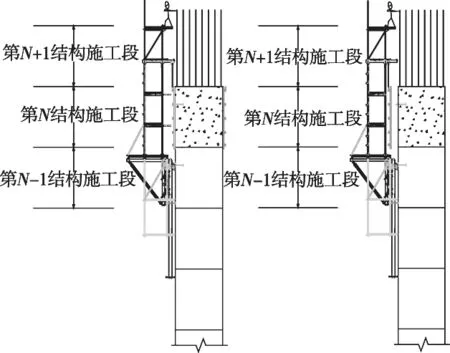
图5 第1步与第2步
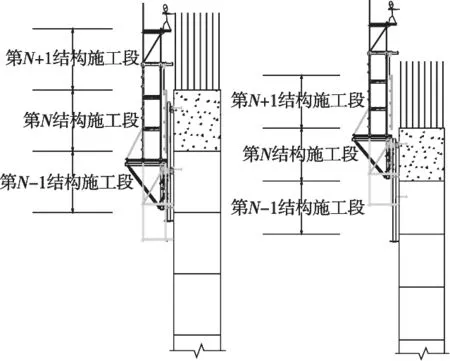
图6 第3步与第4步
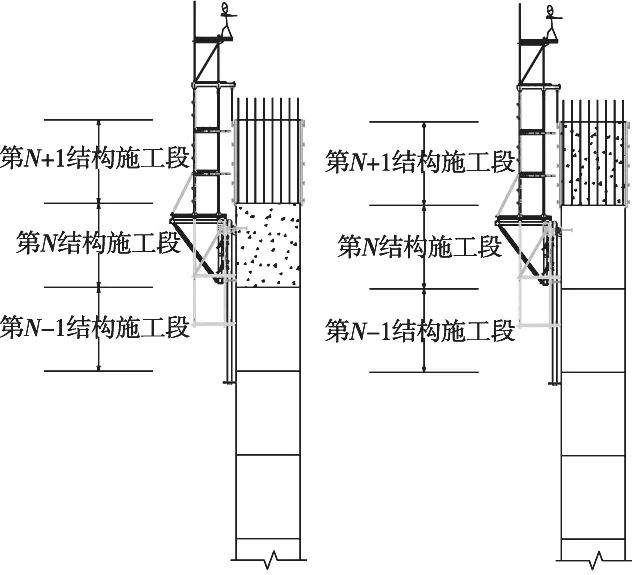
图7 第5步与第6步
3 劲性巨柱模板技术方案
3.1 概况
由于4 根劲性巨柱主要通过钢梁与相邻结构连接,因此只能在劲性巨柱不与钢梁连接的外侧面采用液压爬升模板(钢模)施工;与钢梁连接的面则采用直接在楼板上立模的施工方法。
3.2 模板技术方案主要内容
(a)无梁侧面模板采用成套组合钢大模,模板面板采用厚5 mm钢板,8#槽钢肋,围檩采用12#双肢槽钢,对拉螺栓采用锥形螺母系列螺杆。
(b)有梁侧面的模板,采用可折钢框肋加面板的工艺支模。其面板可采用厚18 mm涂膜胶合板。钢框可采用扁钢和40 mm×60 mm方钢管等型材。活动围檩采用双肢12#槽钢,以24 mm斜角螺栓和H型螺母对拉螺杆将其固定。
4 液压爬模系统的主要功能及参数
4.1 液压爬模系统的主要功能特点
(a)液压爬模系统可应用于高层、超高层竖向剪力墙结构施工;高耸构筑物垂直或倾斜墙体以及特殊构筑物(烟囱)等的结构施工。
(b)可携带模板体系同步提升;在混凝土养护同时可进行上层结构钢筋绑扎;爬升状态下抵抗6 级风作用,施工状态下抵抗8 级风作用; 一次爬升高度最大可达到5 m。
(c)可同时进行单组二机位,单组四机位同步爬升;可多组爬模同步爬升;可采用电脑控制自动爬升;可采用操控盒人工操作爬升;爬升的速度可以设定在150~200 mm/min;满足高空施工的安全围护设计。
4.2 主要技术参数
劲性巨柱的液压爬模系统的主要技术参数如表2所示。
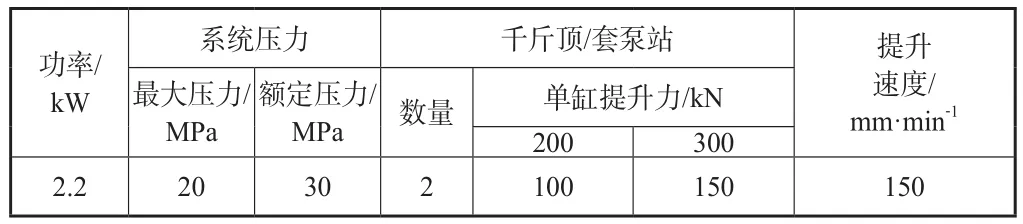
表2 液压爬模系统的主要技术参数
5 结语
广州珠江城劲性巨柱的液压爬模系统在2009年5月初安装就位,正常流水施工作业阶段施工工期达到平均3 d/层。
YAZJ-15液压自动爬升模板系统在广州珠江城劲性巨柱施工中的应用再次表明通过对施工工艺、系统总体架构、关键系统和关键技术的研究和应用,该液压爬模系统效率和体系适应性不断提高,将大大改善我国模板工程技术落后的现状。
猜你喜欢
施工技术(中英文)(2022年10期)2022-06-18
建材发展导向(2021年18期)2021-11-05
化工管理(2021年7期)2021-05-13
河北果树(2020年1期)2020-02-09
建筑机械(2018年2期)2018-03-06
城市道桥与防洪(2017年7期)2017-08-07
山西农经(2016年5期)2016-02-28
陕西科技大学学报(2015年5期)2015-12-25
烟台果树(2015年3期)2015-12-10
河南科技(2015年3期)2015-02-27
