
电容式冻土测量传感器设计*
2014-09-20 08:03余国河朱东红
传感器与微系统 2014年1期
李 鹏, 余国河, 陈 涛, 朱东红
(中国电子科技集团公司 第二十七研究所,河南 郑州 450045)
0 引 言
冻土测量是冻土区生产建设的基本需求,在气候环境变化研究和冻土气象灾害预报等领域也是不可或缺的。目前,测量冻土的方法有遥感法、达尼林冻土器、坑测法、冻土钻法等。其中,遥感法是近几年国外研究者关注的热点,但其只能获取浅层地表的土壤冻融状态并且数据分辨率粗,因此,只适用于探测区域尺度和全球尺度的冻融循环[1,2]。而国内冻土观测站测量冻土一般是用达尼林冻土器,其方法是通过人工摸测水的冻结情况来判断冻土深度,由于土壤质地、水溶液的成分和浓度及外界条件,如压力的不同,其冻结(冰点)温度与纯水的冻结温度并不相同,用该方法测量冻土深度并不科学[3]。当冻土层较深时,坑测法和冻土钻法测量不方便,工作量大,数据密度不够,不能实时监测土壤冻融深度及其发展变化情况。
针对人工测量冻土不科学、工作量大、测量数据密度不够等问题,本文设计了一种电容式冻土测量传感器。其利用空气、固态土、水和冰介电常数存在差异的原理,采用高频电容测量技术、插管式结构和柔性电路板工艺,可以准确检测土壤冻融变化、减少了安装维护工作量、提高了垂直测量分辨力,可以代替人工观测,实现无人值守冻土自动观测。
1 基本原理
冻土是指含有水分的土壤因温度降到0 ℃或以下时而呈冻结的状态[4]。由此可知,与冻土有关的要素主要是土壤水分和温度。目前自动测量土壤水分的方法主要有:电容法、电阻法、射线法、时域反射法(TDR)、红外遥感法等[5]。其中,电容土壤水分传感器以成本低、动态响应范围宽等特点在土壤水分检测中得到广泛应用。
土壤水分测量传感元件主要由一对电极组成一个电容器,其间的土壤充当电介质,电容器与振荡器组成一个调谐电路,振荡器工作频率f0随土壤电容的变化而变化
(1)
式中L为振荡器的电感,C为土壤电容,Cb为与仪器有关的电容。C随土壤含水量的增加而增加,于是振荡器频率与土壤含水量呈非线性反比关系。
由于L,C的差异性,设计的传感器的振荡频率f0不可能完全一致,因此,在运算前要进行归一化处理。这样,虽然测量频率是不同的,但是,测量频率在以空气频率fa和水中频率fw为端点的区间内的相对位置是相同的。具体办法是:将获得的频率fs代入下列公式
(2)
式中sf为归一化频率;fa为套管中对应传感器悬浮在空气中的频率;fw为套管中对应传感器处在水中的频率;fs为套管中对应传感器在土壤中测得的频率;将测得的归一化频率sf带入工程模型中求得体积含水量θv
θv=a(sf-c)b,
(3)
式中a,b,c为拟合参数。
据上所述,土壤含水量的变化主要是由于介电常数发生变化引起的。因此,当土壤中的水变为冰晶时,其介电常数发生了明显的变化,传感元件测得的水分值会明显下降,而当温度上升,冻土解冻时,冰融化成水,介电常数变化,水分值会明显上升。因此,电容式冻土测量传感器是根据土壤水分和温度建立冻土判别模型计算冻土深度[8]。
2 传感器设计
2.1 传感器结构设计
目前,土壤水分传感器在结构上大多采用插针地埋式或铜环插管式。插针地埋式传感器虽然能够与土壤紧密接触,但是其安装维护特别困难,安装时需要首先挖一个剖面深坑,工作量非常大。另外,一旦传感器出现问题,就需要把传感器挖出来,重新安装,而且还需要一个土壤自然沉降和仪器稳定的过程,因此,大面积推广难度较大。铜环插管式传感器虽然安装维护方便,但受机械加工条件的制约,垂直测量分辨力只能达到10 cm。
冻土测量传感器采用插管式结构,传感单元的检测电路采用柔性电路板设计,柔性电路板是以聚酰亚胺或聚酯薄膜为基材制成的一种具有高度可靠性,绝佳可挠性的印刷电路板具有配线密度高、质量轻、厚度薄的特点。柔性电路板上每2.5 cm设计一组检测电容器和一个温度传感器,提高了垂直测量分辨力。
传感器由一个提环、一个控制处理板、一个异形槽、若干传感单元和橡胶材质填充材料组成,传感器外部有保护套管,套管顶部有防雨水帽,底部有防水堵头。安装时首先使用专用安装工具把防护管打入地下土壤中,然后把传感器卷成圆柱状插入防护管内,橡胶的弹性和柔性电路板自身的张力使测量元件与管壁紧密接触。这种结构不破坏土层,安装维护方便,是一种较理想的结构,其结构简图如图1所示。
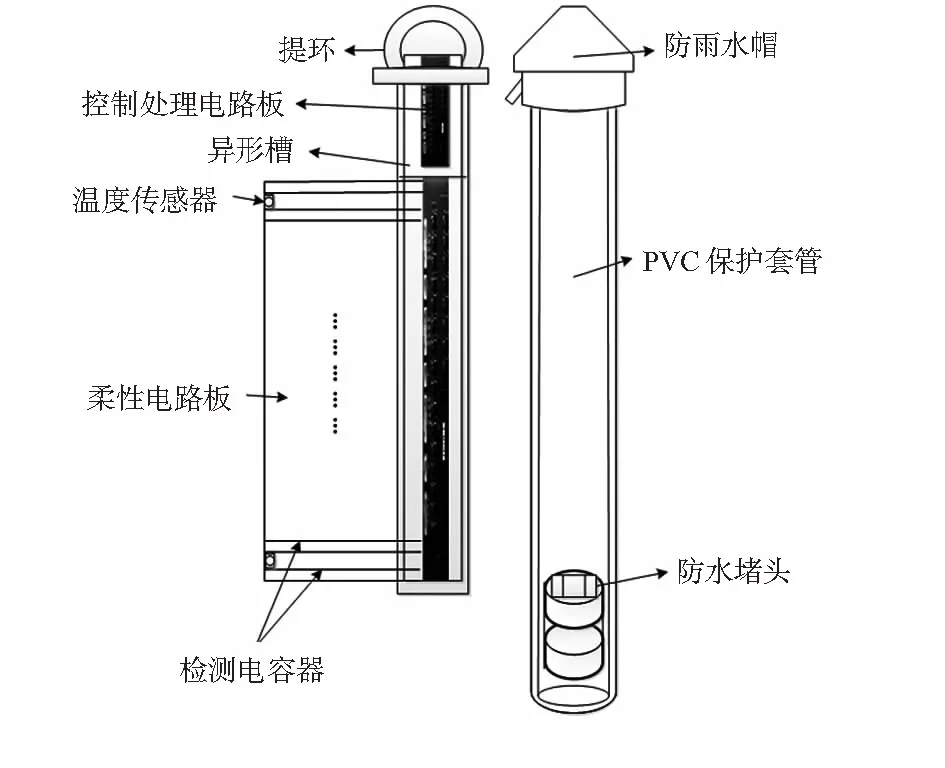
图1 传感器结构简图
2.2 传感器电路设计
2.2.1 传感单元设计
传感单元主要完成土壤水分和温度的测量,由检测电容、信号处理电路、温度传感器和接口电路组成,如图2所示。

图2 传感单元原理框图
2.2.2 检测电容和温度传感器的设计
检测电容是传感单元的敏感器件,周围水分的变化即是电容的介质变化,于是电容值就会改变,从而引起LC振荡器的振荡频率变化。
检测电容采用柔性电路板工艺,柔性电路板中的覆铜作为LC振荡电路的一部分,即电容器的2个电极,土壤作为电容器的介质,土壤水分的变化引起电容的变化,从而引起振荡频率的变化,振荡电路的振荡频率变化在65~110 MHz之间。
柔性电路板上还安装有DS18B20温度传感器,在供电后,处理单元可以通过特征码,分别采集各个温度传感器的数据。
2.2.3 信号处理电路的设计
信号处理板由振荡电路和分频电路组成,主要把检测电容器的容量变化变换为频率变化,然后对该高频信号分频后输出到接口板,如图3。
振荡电路采用LC振荡器。核心器件是压控振荡放大器MC1648。为了ARM微处理器计数器的正常工作和便于传输,该频率需要等比例地降低,这就是分频电路的工作。分频比设定为2048,这需要两级分频器来完成,前一级采用12015,分频比为64,后一级采用SN74HC4040D,分频比为32。为了保证频率传输稳定可靠,信号幅度为12 V。
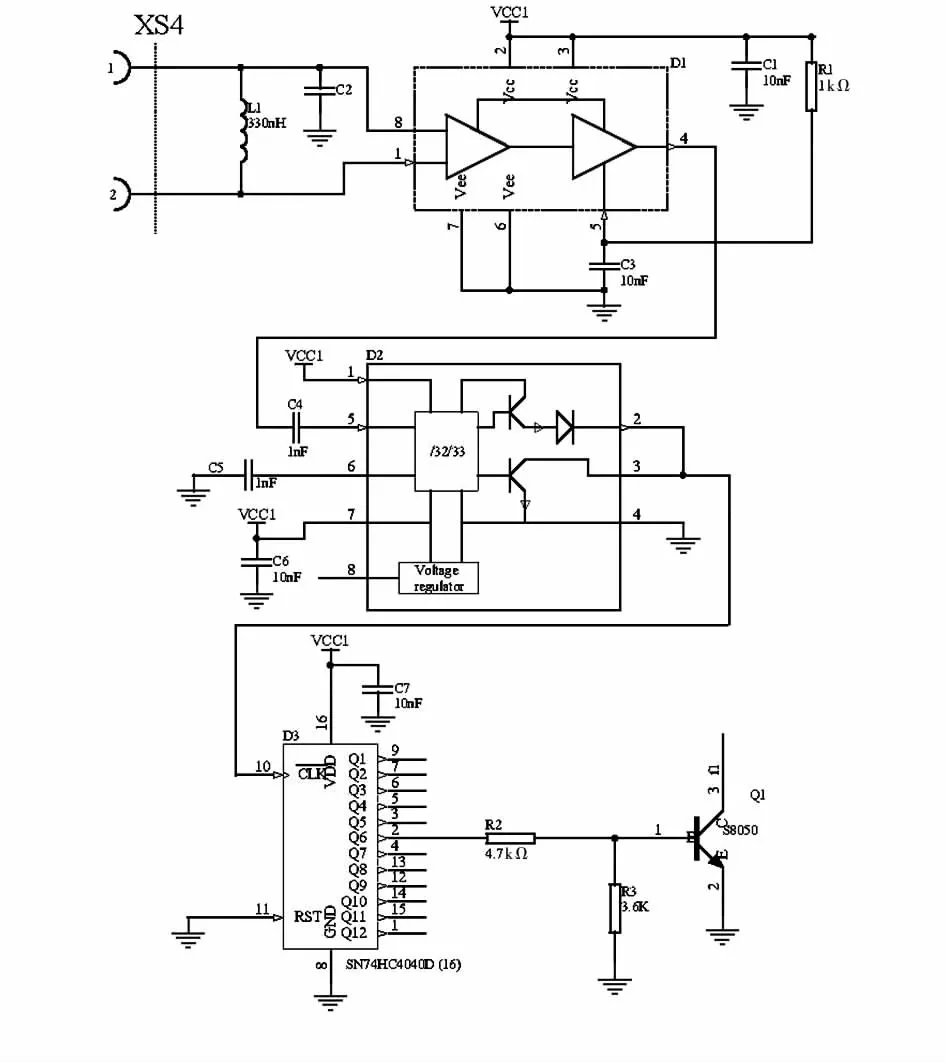
图3 信号处理电路原理图
3 实 验
3.1 土壤冻结过程中土壤水分变化实验
将3只电容式冻土测量传感器分别装置在模拟冬季环境实验室砂土、壤土和粘土3种土槽中,其中,3种土壤的初始含水量分别为6.7 %,27.2 %,32.3 %(实验过程中不考虑蒸发和传感器周围水分的迁移)。每10 min采集一次数据,整理得到土壤冻结过程土壤水分变化曲线如图4所示。

图4 土壤冻结过程水分变化曲线图
从图4曲线分析可知,在不同的土壤类型,不同的初始土壤含水量情况下,冻结过程中不能通过土壤含水量精确确定土壤是否冻结,但能看到土壤中水结冰的过程中土壤含水量在急剧减小,说明水相变成冰后介电常数在急剧减小,当水完全结冰,即土壤完全冻结后,随着温度的降低,土壤含水量变化幅度不大,即介电常数变化幅度不大。由此可知,0 ℃并不能做为判定冻土的唯一条件,土壤冻结过程开始后有2种状态存在,即正冻土和已冻土[4],在正冻土状态下判定是冻土还是未冻土要根据不同的土壤类型,结合土壤水分含量和温度变化情况综合来考虑。
3.2 外场冻土深度实验
根据QX/T 58—2007,地面气象观测规范第14部分冻土观测的要求,冻土观测时间是从地表温度降到0 ℃或0 ℃以下,土壤开始冻结时,每日8时观测,直到次年土壤完全解冻为止[3]。因此,冻土测量传感器实验数据资料为全部实验数据的一部分,取土壤冻结期内每天8时的传感器测量的数据与人工进行对比,分析整理了某试验站的数据资料(见表1),其中,数据资料时间从2012年10月4日至2012年12月23日。
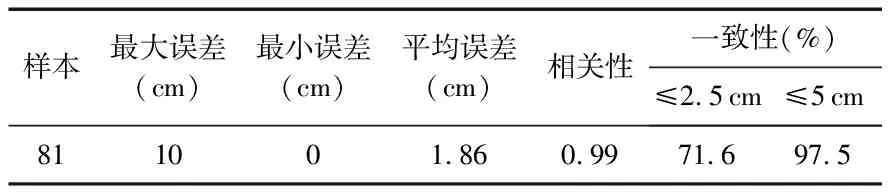
表1 实验结果
人工测量冻土深度值与传感器测量深度值对比曲线图如图5所示。
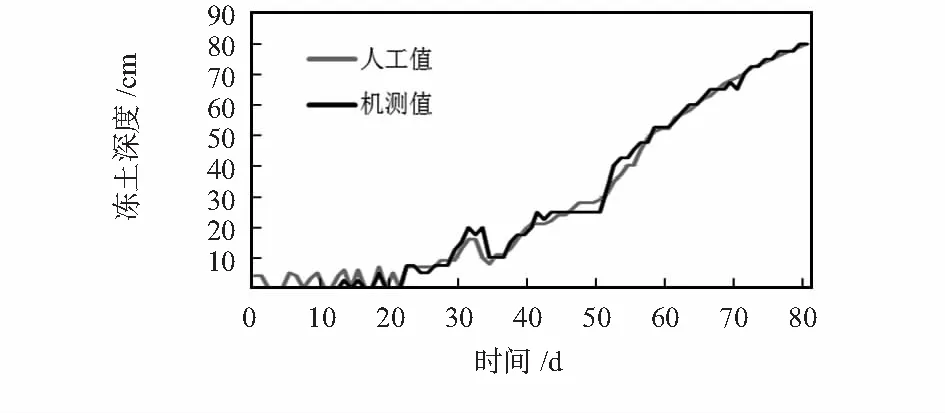
图5 人工机测值对比图
通过对比发现,从2012年10月4日至2012年12月23日,冻土深度由0 cm变化到80 cm,平均绝对误差在2.5 cm以下,但是最大误差偏高,因此,冻土深度判定算法还需改进。
4 结 论
本文提出的利用空气、固态土、水和冰物理特性存在
差异的原理设计的电容式冻土测量传感器,通过进行外场人工对比实验,结果表明:其相关系数达到了0.99,冻土深度平均绝对误差小于2.5 cm,测量误差的一致性较好,满足冻土自动测量技术要求,并且能够在无人值守的情况下连续自动观测土壤冻融状态变化,减少了工作量,降低了安装维护成本,填补了我国冻土自动测量仪器的空白,加速了我国冻土观测自动化进程。
参考文献:
[1]张廷军,晋 锐,高 峰.冻土遥感研究进展:可见光、红外及主动微波卫星遥感方法[J].地球科学进展,2009(9):963-972.
[2]张廷军,晋 锐,高 峰.冻土遥感研究进展:被动微波遥感[J].地球科学进展,2009(10):1073-1085.
[3]涂满红,关彦华,马舒庆,等.QX/T 58—2007.地面气象观测规范第14部分冻土观测[S].北京:气象出版社,2007.
[4]徐斅祖,王家澄,张立新.冻土物理学[M].北京:科学出版社,2010.
[5]胡建东,赵向阳,李振峰,等.参数调制探针式电容土壤水分传感技术研究[J].传感器技术学报,2007,20(5):1057-1060.
[6]秦建敏,程 鹏,秦明琪.冰层厚度传感器及其检测方法[J].水科学进展,2008,19(3):418-421.
[7]秦建敏,程 鹏,李 霞.电容式冰层厚度传感器及其检测方法的研究[J].微纳电子技术,2007(7):185-187.
[8]尚松浩,毛晓敏.基于BP神经网络的土壤冻结温度及未冻水含量预测模型[J].冰川冻土,2001,23(4):414-418.
猜你喜欢
小哥白尼(趣味科学)(2020年7期)2020-05-22
小哥白尼(趣味科学)(2018年9期)2018-12-18
资源再生(2017年4期)2017-06-15
电子制作(2017年23期)2017-02-02
高原山地气象研究(2016年2期)2016-11-10
中国资源综合利用(2016年10期)2016-01-22
化工进展(2015年3期)2015-11-11
时代英语·高三(2014年5期)2014-08-26
塔里木大学学报(2014年3期)2014-03-11
自然资源遥感(2014年2期)2014-02-27
