具有急回特性的平面四杆机构的比较与应用研究
2014-09-19 08:36:52王美蓉
机械制造与自动化 2014年6期
王美蓉
(西安铁路职业技术学院机电工程系,陕西西安710014)
0 引言
急回特性是具有曲柄的平面四杆机构的重要特性,急回特性能提高机构在非工作行程中的速度,缩短非工作时间,提高工作效率,因此其在工程机械中得到广泛应用[1]。目前对于各种典型的平面四杆机构的急回特性研究的比较多,但通过对具有急回特性的四杆机构进行比较,从而根据机构的不同特点,选用合适的机构用于工程实践的研究还不多。本文在对具有急回特性的典型四杆机构特性进行比较的基础上,总结出不同类型急回四杆机构的优缺点,可供工程机械上的选用提供理论依据。
1 几种典型四杆机构的急回特性分析
急回特性是指当主动件曲柄做等速转动时,从动件在两极限位置间运动的平均速度不同,出现了速度差[2]。从定义可以看出具有急回特性的四杆机构一定具有曲柄,所以下面对几种具有曲柄的四杆机构进行分析。
1.1 曲柄摇杆机构的急回特性
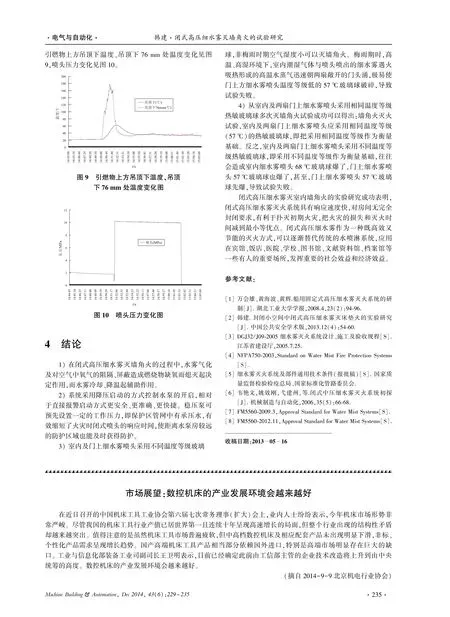
曲柄摇杆机构分为Ⅰ型、Ⅱ型两种[3],如图1所示。当曲柄AB为主动件时,在曲柄AB和摇杆CD共线的两个位置,摇杆处于两极限位置C1D和C2D,曲柄和摇杆的运动参数见表1。从表1中可知,在工作行程和空回行程中从动件摇杆摆动的角度均为ψ,弧长为C1C2,因此,空回行程C点的平均速度大于工作行程C点的平均速度,机构具有急回特性。

图1 曲柄摇杆机构
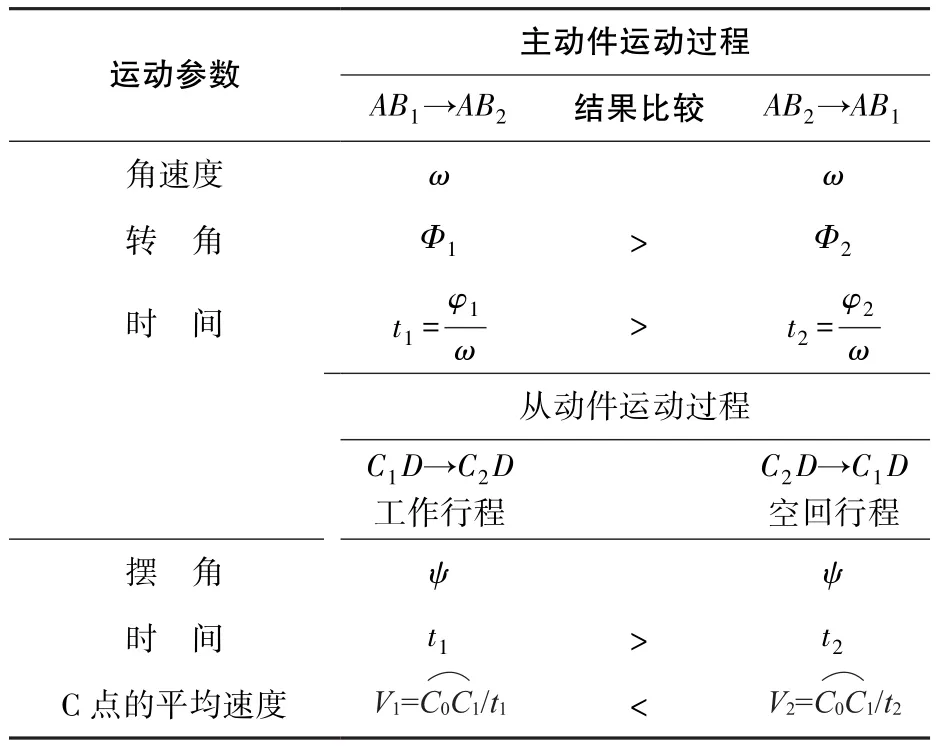
表1 曲柄摇杆机构的运动参数
1.2 曲柄滑块机构的急回特性
曲柄滑块机构分为对心曲柄滑块机构和偏置曲柄滑块机构两种[4],如图2所示。曲柄滑块机构的急回特性分析与曲柄摇杆机构相同,在图2(a)所示的对心曲柄滑块机构中,当摇杆BC处于两极限位置时,曲柄AB转过的角度相同,所用时间相同,滑块在工作行程和空回行程的速度相同,因此无急回特性;而在图2(b)所示的偏置曲柄滑块机构中,当摇杆BC处于两极限位置时,曲柄AB转过的角度不同,所用时间不同,滑块在工作行程和空回行程的速度不同,因此有急回特性。

图2 曲柄滑块机构
1.3 摆动导杆机构的急回特性
摆动导杆机构中当曲柄AC做整周转动时,导杆BC仅能在一定的角度(ψ)范围内往复摆动,则该机构为摆动导杆机构[5],如图3所示。在此机构中当曲柄AC做一整周转动时,导杆BC有两个极限位置BC1、BC2,在机构运动的过程中,运动参数如表2所示,由于V2大于V1,即摇杆BC在摆回的过程中速度较快,因此,摆动导杆机构具有急回特性。
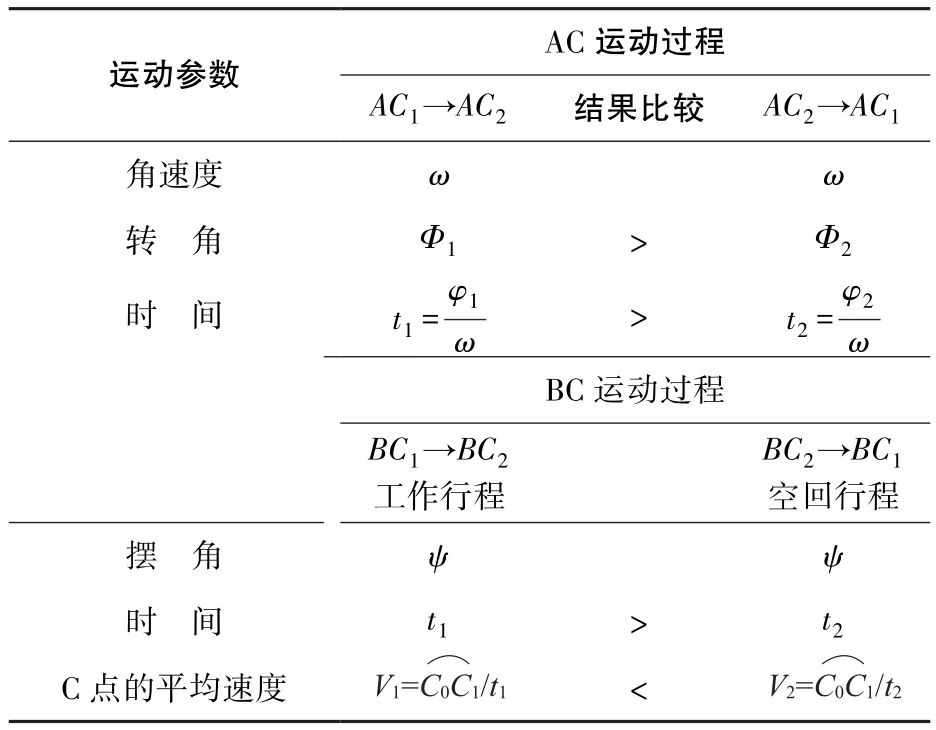
表2 摆动导杆机构的运动参数
图3 摆动导杆机构
1.4 双曲柄机构的急回特性
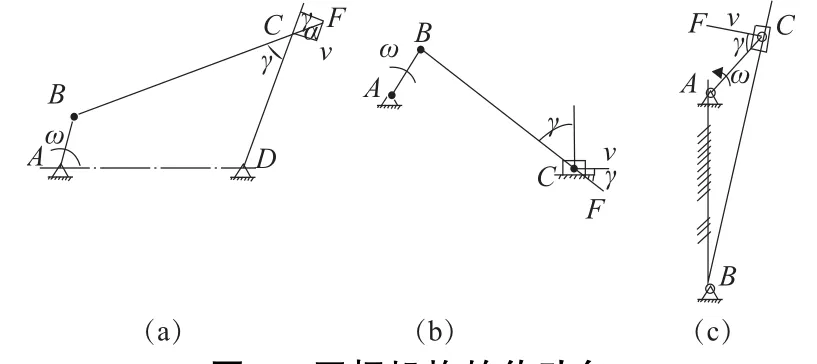
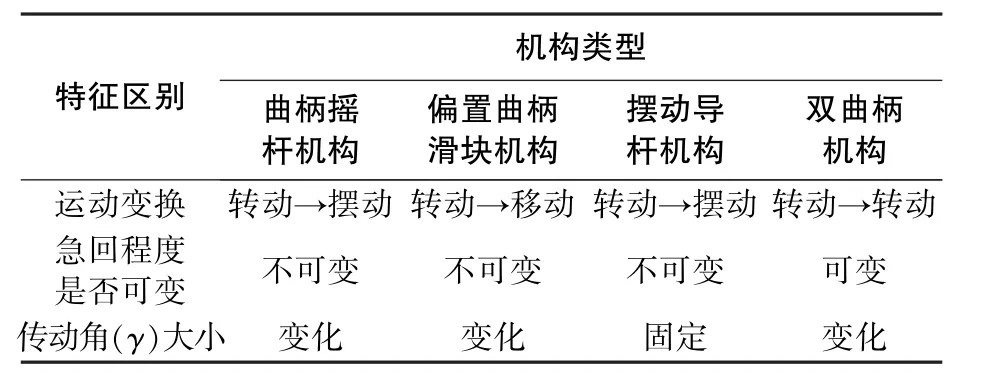
图4(a)所示为一双曲柄机构,AB以ω沿逆时针方向做整周等速转动时,DC做变速整周转动,为了分析机构的急回特性首先要找到从动件曲柄DC的两个极限位置[6]。设主动曲柄AB从初始位置AB0转过φ1=180+θ到AB1位置,从动件曲柄DC从DC0转过180°到DC1位置,这一过程中所用时间AB继续从 AB转过 φ12=180-θ回到 AB0,此时 DC 从 DC1转过 180°回到 DC0,这一过程中所用时间,因为 φ>φ,t>121t2,所以V1 图4 双曲柄机构及其极限位置 1)急回特性的比较 从以上分析可以看出,曲柄摇杆机构、偏置曲柄滑块机构、摆动导杆机构和双曲柄机构都具有急回特性,能满足工程上某些机械对急回的要求,同时这四种机构也存在差异,其中前三种机构一旦组成机构的各杆件尺寸确定了,则衡量机构急回特性的参数极位夹角θ和行程速比系数K是固定的,因此机构的急回特性不变。双曲柄机构中衡量急回特性的参数极位夹角θ和行程速比系数K还与机构主动件起始位置有关,主动曲柄起始位置不同则两参数不同,机构的急回程度也不同,也就是说双曲柄机构的急回是可变的。 2)运动转化的比较 具有急回特性的平面四杆机构主动件都是曲柄,机构运动时主动件绕机架做转动,连杆一般做平面运动,从动件的运动形式根据机构类型不同有多种形式。曲柄摇杆机构和摆动导杆机构中从动件绕机架做来回摆动,即将主动件曲柄的旋转运动转化成从动件的摆动;偏置曲柄滑块机构中从动件相对于机架做往复直线运动,即将曲柄的旋转运动转化成从动件的移动;双曲柄机构中从动件仍然绕机架做旋转运动,但将主动曲柄的等速转动转化成从动曲柄的变速转动。 3)传动角的比较 机构在工作时不仅要传递一定的运动,还要传递一定的动力,因此在了解这四种机构急回特性的基础上,还需要进一步分析机构的传力性能,机构的传力性能取决于传动角,传动角指的是作用在从动件上的驱动力F与该力作用点绝对速度的垂线之间所夹的锐角γ[7]。图5(a)同时表示曲柄摇杆机构和双曲柄机构的传动角,曲柄滑块机构、摆动导杆机构的传动角分别见图5(b)(c)。从图中不难看出在机构运动的过程中只有摆动导杆机构的传动角可以保持不变,且为90°,机构的传动平稳,传动效率高。其他三种机构的传动角均做变化,设计选用时要控制最小传动角,以保证传动效率。 图5 四杆机构的传动角 4)几种平面四杆机构特性综合 综上所述四种具有急回特性的平面四杆机构在急回程度的可变性、运动变化及动力传递等方面均有所不同,见表3,在工程上使用时应充分考虑其不同。 表3 平面四杆机构的比较 在工程实践中选用机构时不仅要考虑机构的急回特性还要综合考虑其他特性才能做出适当的选择,比如牛头刨床上为了实现刨削运动特性,同时缩短空回行程时间,提高生产效率,使用了摆动导杆机构与摇杆滑块机构的组合机构,既满足了工作中对急回的要求,并且传力性能好、机构所占空间小。在牛头刨床上没有使用偏置滑块机构,主要是因为虽然该机构结构更加简单,但由于刨刀行程较大,需要有较长的曲柄,这会使得机构所占空间增大,并且随着急回程度的增加,传动角将会减小,使机构的传力性能变差,而没有使用曲柄摇杆机构和摇杆滑块机构的组合机构原因也在于此。 具有急回特性的平面四杆机构有很多,它们在急回特点、传力性能及运动变化上有明显的区别,在工程上选用这些机构时要充分综合考虑其特点,选择最佳机构满足机械设备的性能要求、提高机械效益。 [1]边巍.平面四杆机构急回特性分析[J].机械工程师,2010,9:52-53. [2]熊劲松.平面四杆机构急回特性研究[J].自动化应用,2013,7:12-13. [3]吴明远,杨挺.具有急回特性曲柄摇杆机构的解析综合[J].拖拉机与农用运输机,2008,35(4):68-69. [4]代礼前,李东和.机械基础[M].北京:北京邮电大学出版社,2013. [5]邓铭瑶.机械基础及机械实训[M].北京:中国电力出版社,2011. [6]刘平安,赖志刚,王丹.双曲柄机构的急回特性研究[C].第十一届全国机构学年会暨首届青年机构学研讨会论文集,1998:54-56. [7]杨光辉,滕弘飞.机构传动角新定义[J].大连理工大学学报,2010,50(1):67-69.2 几种平面四杆机构的比较及其在工程实践中的应用

2.1 几种平面四杆机构的比较
2.2 几种平面四杆机构在工程实践中的应用
3 结语
猜你喜欢
河南工程学院学报(自然科学版)(2023年3期)2023-09-15 12:24:16
电脑爱好者(2022年5期)2022-05-30 14:58:47
机械设计与制造工程(2022年1期)2022-02-19 13:58:00
南方农机(2021年3期)2021-02-07 09:07:04
湖北农机化(2020年17期)2020-11-02 07:46:54
模具制造(2019年10期)2020-01-06 09:13:08
华北理工大学学报(自然科学版)(2017年4期)2017-11-29 05:02:26
中南大学学报(自然科学版)(2016年2期)2017-01-19 07:36:58
电子工业专用设备(2014年12期)2014-07-04 01:42:40
设备管理与维修(2013年2期)2013-12-04 01:50:28