介电弹性体机电性能测试系统的研制
2014-09-06 07:23:00杨征宇
机械设计与制造工程 2014年1期
闫 华,张 杰,杨征宇,刘 卫
(1.南京工程学院机械工程学院,江苏南京 211167)
(2.先进数控技术江苏省高校重点建设实验室,江苏南京 211167)
介电弹性体是一种能够在电流、电压或电场作用下产生物理形变的聚合物智能材料,这种形变具有瞬发性,因此被视为微型机器人中驱动器的理想材料[1]。与传统微驱动材料相比,介电弹性体产生的应变比传统的脆性压电陶瓷高出两个数量级,比形状记忆合金响应速度更快,因而成为国内外瞩目的新型微驱动材料。近十年来,各国学者对该材料的性能进行了深入的理论和实验研究,特别是作为驱动材料方面的研究引起了人们的广泛关注[2]。目前在这一领域的研究中处于领先地位的是美国加利福尼亚州斯坦福研究院(SRI),SRI试图充分利用介电弹性体的特性,在某些微小产品上取代常规的电动马达或其他的驱动装置,其初期的成果便是二维弯曲辊驱动的六腿机器人,这是聚合物驱动器发展史上的一个里程碑[3]。国内方面迄今为止关于介电弹性体的驱动、结构及应用方面的研究尚处在起步阶段,很多实验装置都是采用手工方式进行电压调节。由于介电弹性体具有高电压驱动和大应变特性,传统的接触测量传感方式用于测试介电弹性体的变形和应变是危险和困难的。因此本文使用具有PWM控制功能的高性能单片机(mega128)控制高压电源逐步给介电弹性体施加高电压,采用数字图像处理技术来测量介电弹性体的机电性能。
1 介电弹性体实验装置的构建
本文首先设计出双向材料预拉伸机构,用于对介电弹性体薄膜进行双向预拉伸。双向材料预拉伸机构以步进电机为动力源,以梅花联轴器与滚珠丝杠进行联接,通过滚珠丝杠副带动夹具进行直线运动。工作台面设计了特殊的夹具,用于在介电弹性体薄膜的四边夹紧介电弹性体薄膜。为了使介电弹性体薄膜能够在二维平面内实现任意拉伸,它被设计成X,Y向均可单独运动。
使用双向材料预拉伸机构对介电弹性体薄膜的两个方向按照一定的比例预拉伸后,在薄膜的上下两面对称地分别加上圆环形框架,然后在介电弹性体薄膜上下两面的中心区域分别涂上石墨电极,使用锡纸做成导电线路,以便在石墨电极的上下两面分别施加正负直流高电压。构建好的实验装置如图1所示。
2 高电压自动控制系统的设计
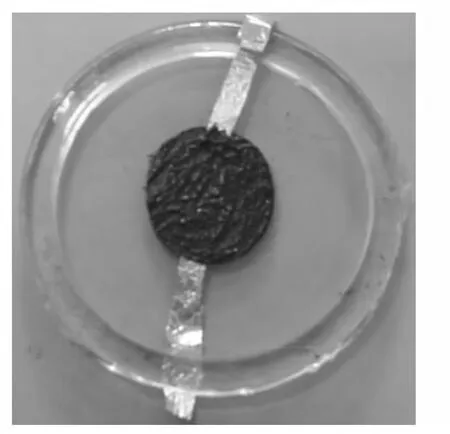
图1 介电弹性体实验装置
为了测试介电弹性体薄膜的机电性能,需要对其逐步施加高电压。本文设计的高电压自动控制系统主要由天津东文高压电源有限公司生产的直流高压电源以及具有PWM控制功能的单片机(mega128)组成,采用PWM高级控制模式,PWM信号的幅值和工作周期控制着输出给介电弹性体的几千伏直至上万伏的直流电压。使用AVR单片机编写的PWM程序,可控制10kV可调的高压基准电源实现输出电压的自动增加,用于逐步给介电弹性体施加高电压。输出电压、电流值通过直流高压电源上的数码管进行显示。
AVR单片机的定时器可以轻松实现PWM功能。Mega128的timer0和timer2都具有PWM功能,timer0和timer2都是8位定时器。通过调整其占空比就可以达到改变输出电压的目的。Mega128单片机实现PWM功能的具体程序如下:#include <avr/io.h>
#include <util/delay.h>
#include <avr/interrupt.h >unsigned int pulse_width;
unsigned char step=0x02;
unsigned char pulse_width_MIN=0x00;
int main(void)
{
PORTB=0X00;
DDRB=0xff;
TCCR0|=(1 <<WGM01)|(1 <<WGM00)|(1<<COM01)|(0<<COM00)|(1<<CS01);
sei();
OCR0=pulse_width_MIN;
_delay_ms(600);
pulse_width=OCR0;
while(pulse_width<0x7a)
{
OCR0+=step;
pulse_width=OCR0;
_delay_ms(3000);
}
OCR0=0x7f;
_delay_ms(200);
while(1){:}
}
3 图像采集及处理系统的设计
3.1 图像采集系统的构建
本研究通过图像采集及处理系统测试介电弹性体薄膜的机电性能。构建的图像采集系统如图2所示。摄像机采用AVT公司生产的Stingray F-504B/C,它是高性能的具有1394b接口的工业数字摄像机,配备有一个500万像素的CCD传感器,内置诸多实时图像预处理功能,可以得到很高的图片质量。Stingray F-504B/C摄像机通过支架被安装在介电弹性体上方用于拍摄电极区域的变化。直流高压电源的输出直接连接到被测试的介电弹性体中心电极区域的上下两面,给介电弹性体薄膜逐步施加高电压,电极涂上石墨部分的材料面积随着电压的增加不断变化。使用AVR单片机编程控制步进输入电压从0V开始施加到介电弹性体上,每隔5s增加200V直至增加到7 000V,在每5s结束时拍下快照,采集的介电弹性体图像被分别保存到计算机硬盘中。随后通过MATLAB程序分别打开各次采集的图像,自动计算电极区域面积的变化量。
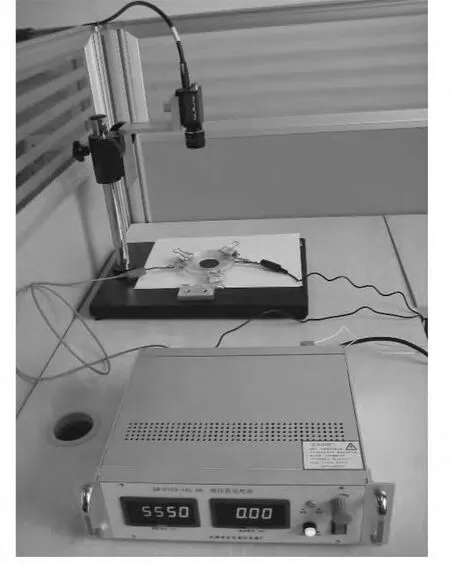
图2 图像采集系统图
3.2 MATLAB图像处理程序设计
3.2.1 设计主界面
在MATLAB命令窗口中输入guide就可打开GUI的快速开发环境GUIDE。本文设计的程序主界面主要由5个位图格式的图片、3个编辑文本框和3个静态文本框以及5个菜单项组成。如要改变最下方静态文本框的属性,首先选中该控件,然后点击工具条上的属性设置按钮打开属性编辑器,当然也可通过其他的方式打开属性编辑器,然后通过该编辑器为静态文本框设置相关属性。控件的位置和大小可通过改变Position属性中的值来调整,也可在GUI面板中用鼠标拖动控件来调整控件的位置和大小。此外,当有控件需要对齐时,可以通过对齐编辑器进行修正。
3.2.2 菜单设计及回调程序的编制
要建立用户菜单可用uimenu函数,因其调用方法不同,该函数可以用于建立菜单条中的菜单项和子菜单中的菜单项。
建立菜单条的函数调用形式为:
菜单项句柄=uimenu(图形窗口句柄,属性名1,属性值1,属性名2,属性值 2,…)
建立子菜单的函数调用形式为:
子菜单句柄=uimenu(父菜单句柄,属性名1,属性值1,属性名2,属性值2,…)
完成控件的布局之后,也就完成了整个图形界面的结构设计,接下来则是最为重要的功能设计,即要编制菜单、控件的回调程序。若要编制某一控件的回调程序,用右键单击该控件,在弹出菜单中点击View Callbacks,然后从子菜单中选择一种激活回调程序的方式,就可以编制回调程序了,如Callback指单击控件时激活回调程序完成一定的功能。菜单的回调程序在菜单编辑器的Callbacks文本框中给出。主要的回调程序如下:
%“图像处理”菜单项的回调程序
Function m_file_deal_Callback(hObject,eventdata,
handles)
global img_1;
global img_2;
global BW3;
global BW6;
im=rgb2gray(img_1);
BW1=~im2bw(im);
SE=strel( 'disk ',10);
BW2=imerode(BW1,SE);
BW3=imdilate(BW2,SE);
axes(handles.axes3);
imshow(BW3);
im1=rgb2gray(img_2);
BW4=~im2bw(im1);
SE1=strel( 'disk',10);
BW5=imerode(BW4,SE1);
BW6=imdilate(BW5,SE);
axes(handles.axes4);
imshow(BW6);
%计算面积及变形率(“计算”菜单项的回调程序)
function m_file_js_Callback(hObject,eventdata,
handles)
global BW3;
global BW6;
s1=bwarea(BW3);
s2=bwarea(BW6);
ar=(bwarea(BW6)-bwarea(BW3))/bwarea
(BW6);
set(handles.edit1,'string',ar)
set(handles.edit2,'string',s2)
set(handles.edit3,'string',s1)
legend( 'y1 ');
function m_file_input_Callback(hObject,eventdata,handles)
在上面的MATLAB程序中使用im2bw函数进行图像二值化处理时,人为设定阈值并不总是十分有效,为此MATLAB工具箱提供了graythresh函数,该函数使用最大类间方差法得到一个阈值,将这个阈值施加到每幅图像即可把它们转换成二值图像。提取出相应于介电弹性体电极区域的圆环特征,计算构成电极区域的像素数,与未施加电压时介电弹性体电极区域的像素数目相对比,便可得到电极区域面积伸展率。图像处理的流程如图3所示。将计算出的面积伸展率作为Y轴,相对应的电压作为X轴,画出介电弹性体电极区域面积的变化曲线图。介电弹性体薄膜的不可压缩性也意味着预伸展率和面积伸展率能用于计算正负电极间的间隙和相应的电场力。程序运行结果如图4所示。
4 结束语
本文构建了介电弹性体机电性能测试系统,改变了以前手动加压、用尺测量介电弹性体变形量的方法,同时也克服了传统方法中传感器难以附着的技术难题,实现了无接触式的全新的测量方法。试验证明,该测试系统能够自动计算出介电弹性体薄膜中心电极区域的面积变化量,得出电极区域相对于电压逐步增加的面积变化率。文中得到的介电弹性体的机电特性曲线,对介电弹性体性质的研究工作具有重大的意义。
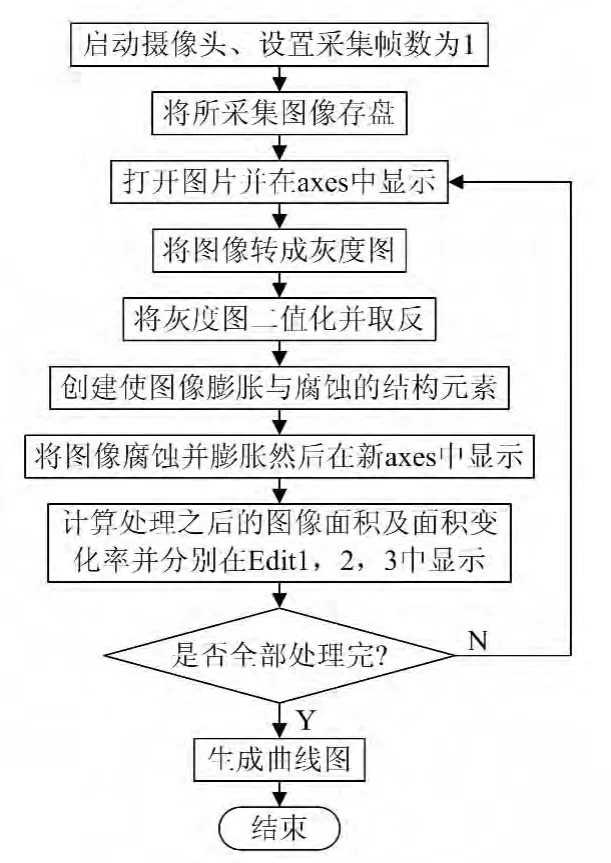
图3 图像处理流程图
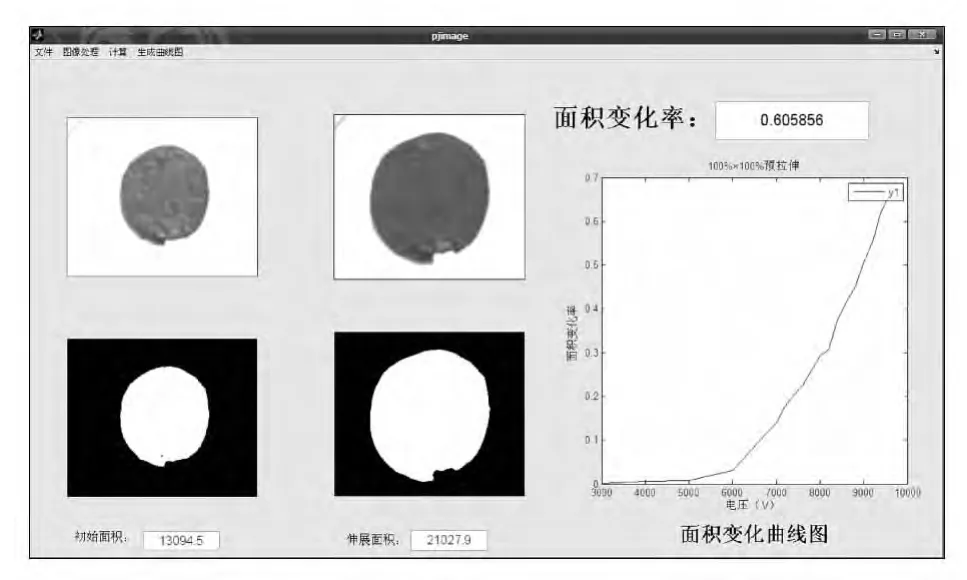
图4 程序运行结果图
[1] Bar-Cohen Y.Electroactive Polymer(EAP)Actuators as Artificial Muscle[M].2nd.Washington:SPIE press,2004.
[2] Kim K J,Tadokoro S.Electroactive Polymer for Robotic Applications[M].London:Springer,2007.
[3] Pei Q,Pelrine R,Rosenthal M,et al.Recent progress on electroelastomer artificial muscles and their application for biomimetic robots[C]//Bar-Cohen Yoseph.Smart Structures and Materials 2004:Electroactive Polymer Actuators and Devices.San Diego,CA:SPIE,2004:41-50.
猜你喜欢
弹性体(2021年6期)2021-02-14 05:39:00
疯狂英语·新悦读(2020年1期)2020-02-20 13:23:04
软件(2018年7期)2018-08-13 09:44:42
材料科学与工程学报(2016年1期)2017-01-15 13:34:10
美食堂(2017年1期)2017-01-13 01:37:42
橡胶工业(2015年3期)2015-07-29 08:24:16
火炸药学报(2014年5期)2014-03-20 13:17:51
鸭绿江(2013年10期)2013-03-11 19:41:55
电脑迷(2012年24期)2012-04-29 00:44:03
智能计算机与应用(2005年1期)2005-04-29 00:44:03