基于电磁场寻线智能车传感器的布局及控制策略
2014-09-06 10:49:58杨阳兰一星袁靖
单片机与嵌入式系统应用 2014年5期
杨阳,兰一星,袁靖
(乐山师范学院 物理与电子工程学院,乐山 614000)
基于电磁场寻线智能车传感器的布局及控制策略
杨阳,兰一星,袁靖
(乐山师范学院 物理与电子工程学院,乐山 614000)
本设计是以“飞思卡尔”杯全国大学生智能车竞赛为背景的电磁场检测的寻线智能汽车。系统的特点是充分利用磁场检测传感器的布局来识别路径,以达到在速度较快的情况下控制小车的舵机转向。本文主要介绍了传感器的布局方法和转向与速度的控制策略。实验证明该系统的传感器布局和控制策略能较好地互补,使小车达到最佳状态。
智能车;电磁传感器;舵机控制;PID算法
引 言
以通电导线产生的磁场对智能车进行引导的优点在于不受光线、温度、湿度的影响,外界干扰小,控制可靠。但是以往的电磁车的传感器布局一般为单排,其缺点是只能确定传感器相对于赛道中心的位置而不容易判断出车身的位置,导致转向时不能得到最佳的控制策略。因此本设计实验了双排传感器的方案。理论分析和实践证明,双排传感器的布局方法比单排传感器信息量大,控制线性化好,转向和速度更为优化。
1 设计原理
1.1 基本原理
根据电磁学基本理论,我们知道比赛赛道上的导线在通入了20 Hz、100 mA的电流后产生磁场。
在此稳恒磁场中放置一电感线圈,线圈中感应电动势的大小正比于电流的变化率,反比于线圈中心到导线的距离。公式如下:
其中k为与线圈摆放方法、线圈面积和一些物理常量有关的一个量。该公式说明,在导线周围不同位置,磁感应强度的大小和方向不同,电磁传感器在不同位置获得的信号强度也不同,由此可以确定赛车前方的转向和车身当前位置。
1.2 本车传感器的布局及设计
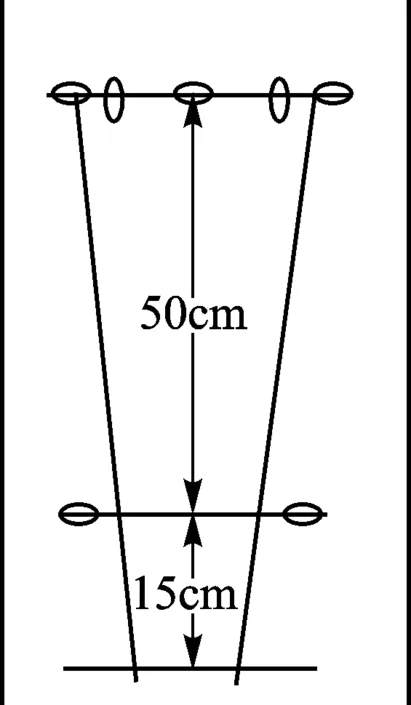
图1 传感器布局图
我们在小车前方50 cm采用三个电感线圈与中心导线相垂直、两个电感线圈与中心导线相平行的方式来布局,主要用于判断小车将要进入的赛道道路弯曲程度和路况。在小车前方15 cm处与中心导线相垂直的方向放置两个电感线圈,来判断小车车身当前偏离中心线的位置,还可以判断车子是入弯还是出弯。整个系统电磁检测传感器的布局如图1所示。
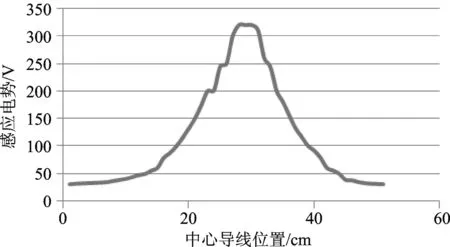
图2 垂直布局传感器感应电势与中心导线的位置关系
当车模在直道上从左至右水平移动时,前排和后排垂直放置传感器的感应电势值与中心导线的位置关系如图2所示。数据均经过了滤波、限幅和归一化处理。
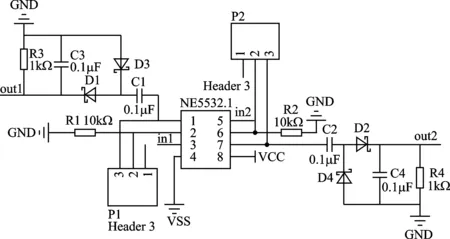
图4 放大和检波电路原理图
从图2可以看出,传感器垂直布局时,在直道上偏离中心线越远,感应电势值越小。采用多个传感器对称布局而不是单一传感器的优点在于不仅能计算偏离距离,而且能得出偏离方向,简化系统硬件设计。
前排另外两个电感线圈水平竖直放置,在直道上与赛道中心导线成平行方向,因此其在直道上所感应电势值较小,如图3所示。而在弯道上,由于与中心导线具有一定角度不再平行,这两个电感线圈感应电势的绝对值和变化率均变得较大,所以用其检测前方道路弯曲程度和小车面临转向角度是可以考虑的较好方案。
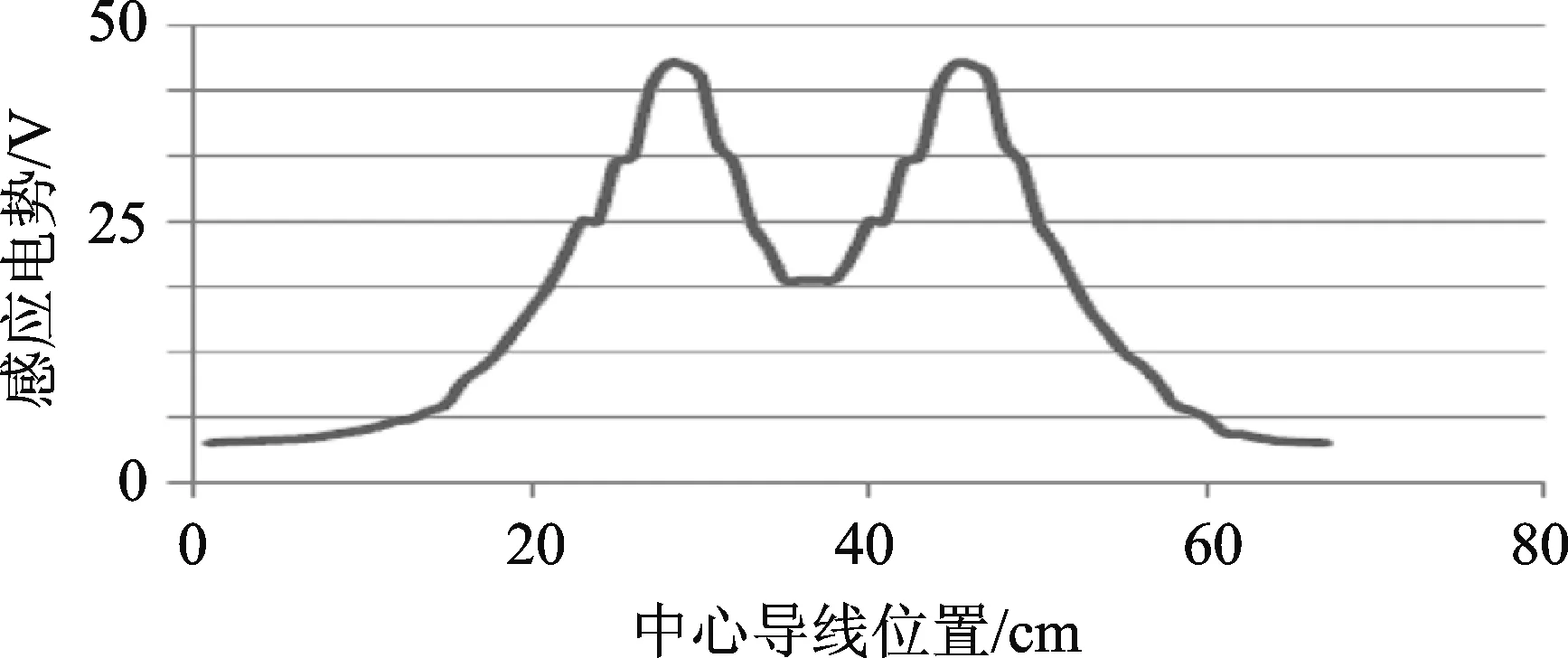
图3 平行布局传感器感应电势与中心导线的位置关系
2 数据采集和处理
2.1 检测信号采集
为了能不失真且放大倍数较大,在经过了三极管分立元件、LM386集成运放和NE5532的测试后决定用NE5532来作为磁场检测信号的放大模块,并用肖特基二极管在作为检波元件,其原理图见图4。
放大倍数决定于可调电位器P2的值比上R1的阻值(10 kΩ),是可以调节的。一般将信号放大300倍,使其最大值达到3~5 V较为理想。
2.2 检测信号处理
经过A/D转换存入单片机的采集数据需要进行处理才能用于控制。首先,针对磁场检测信号易受干扰的特点,对数据进行了平均值滤波、限幅等处理;针对电感元件参数的杂散性和安装误差等情况,根据电感感应电势扫描的极大极小值对采集数据进行了归一化处理;根据关系曲线的畸变情况,对数据进行了削顶限幅和修正补偿。
3 转向和速度控制策略
PD控制策略是智能汽车速度与转角控制的较佳方案,但需将通常的PID控制算法进行修正和完善。
在直道上,前排垂直布局的三个电感的感应电势的绝对值和变化率均较大,精度和灵敏度高,适合于将此三个电感线圈在磁场中感应电势的差值与和值的比值作为PD控制中的P值。采用差值与和值相除方式的优点是可以不受上坡下坡时传感器值异常的影响。
前排三个垂直对称布局传感器感应电势的和值与中心导线距离的关系如图5所示。可以看出,中心线附近感应电势的和值变化较小,这与直道上小车稍微偏离中心线时,调整小车位置所需要的转向角度不宜过大相适应,否则容易引起小车行驶过程中振荡。因此,和值适于用作小车的转向控制。只是如前所述,需要对和值在中心线附近的畸变进行削顶和修正。
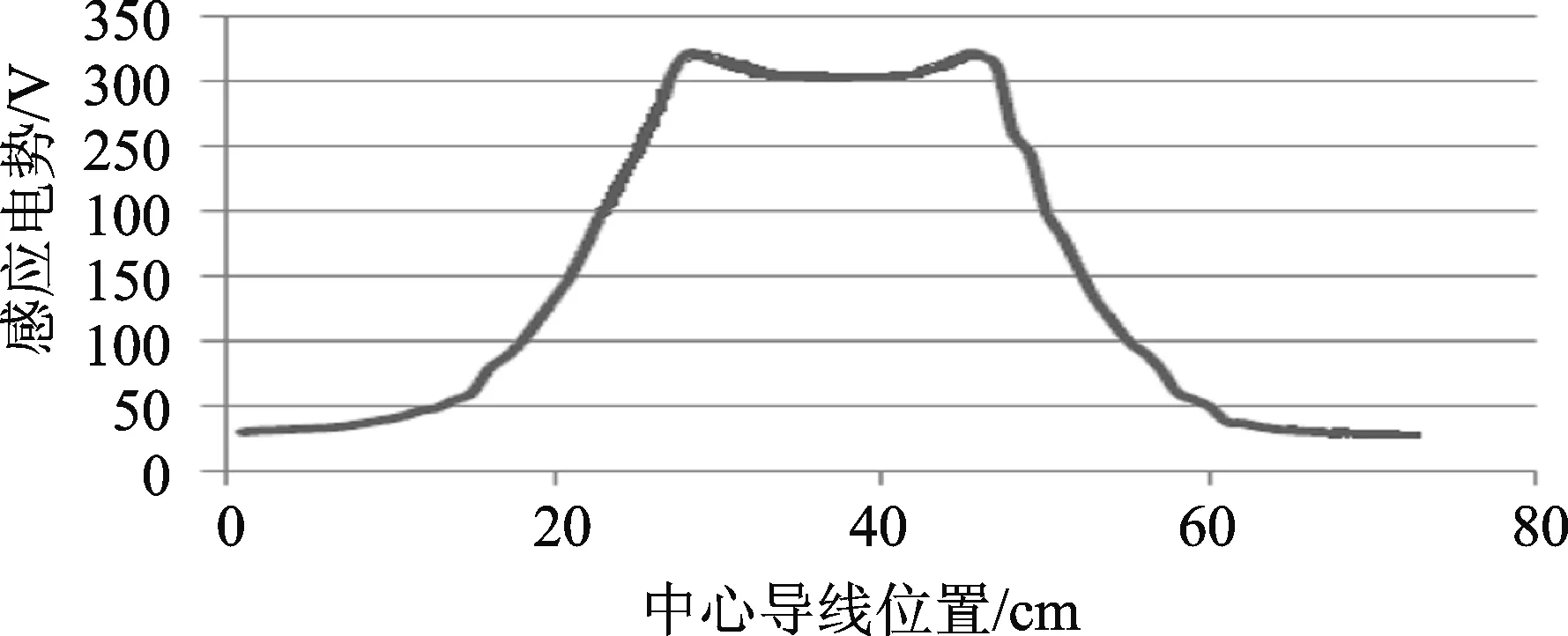
图5 对称线圈感应电势和值与中心导线的距离关系
前排另外两个电感平行于中心导线放置,其在直道上感应电势的值较小,在弯道上感应电势的绝对值和变化率却较大,适合用于检测弯道,因此在转弯过程中将其加入PD控制算法来控制小车转向。
通过后排两个垂直布局电感的感应电势,可以判断小车车身偏离中心线的位置,以及当前车子是入弯还是出弯,其值适于作为PD控制算法中的D值。
在得到可靠的道路信息和车身位置后,就可以用合适的算法来计算舵机转角,然后进一步根据转角的大小来控制电机的转速,见图6。
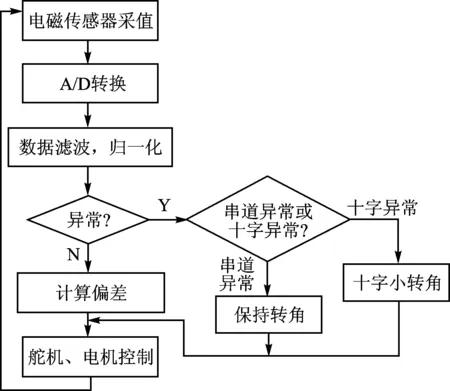
图6 信号处理及速度转角控制图
结 语

[1] 臧杰,阎岩.汽车构造[M].北京:机械工业出版社,2005.
[2] 孙同景,陈贵友.十六位单片机原理及嵌入式开发技术[M].北京:机械工业出版社,2008.
[3] 王威.HCS12微控制器原理及应用[M].北京:北京航空航天大学出版社,2007.
[4] 桌晴,黄开胜,邵贝贝.学做智能车[M].北京:北京航空航天大学出版社,2007.

图7 节点测试结果
测试表明节点用于采集环境温湿度数据,检测距离远并且运行稳定。该设计节点的通用性良好,组网方便,具有扩充能力与发展余地,并可接入互联网方便远程测控与资源共享,具有较强的实用性。
参考文献
[1] 焦腾,张坤,张雯等.基于ZigBee技术的药厂环境检测系统的开发[J].仪器仪表学报,2008,29(8):157-160.
[2] 陈文周.Wi-Fi技术研究及应用[J].数据通信,2008(2):14-17.
[3] 奥松电子.温湿度模块AM2303产品册[OL].http://www.aosong.com.
[4] 秦迎春,秦瑞.基于SHT11温湿度远程监控设计[J].电子设计工程,2012,20(23):75-77.
[5] 王武礼,杨华.基于SHT11的粮仓温湿度测控系统设计[J].仪表技术与传感器,2010(9):50-51,59.
[6] 有人科技.USR-WIFI232-G低功耗嵌入式Wi-Fi模组用户手册v1.4[OL].[2013-05]. http://www.usr.cn.
[7] 宏晶科技.STC15F2K60S2系列单片机器件手册[OL].[2013-06].http://www.STCMCU.com.
贾浩强(硕士生),研究方向为嵌入式系统;李耀(硕士研究生导师),研究方向为嵌入式系统。
(责任编辑:杨迪娜 收稿日期:2013-12-26)
Sensor Layout and Control Strategy of Intelligence Automotive Based on Electromagnetic Field
Yang Yang, Lan Yixing, Yuan Jing
(College of Physics and Electronic Engineering, Leshan Normal University,Leshan 614000, China)
This design participates "Freescale" cup national smart car competition as the background design of electromagnetic detection line smart car. The characteristics of the system is to make full use of the magnetic field detection sensor layout to identify paths, in order to achieve the fast steering gear steering control under the condition of the car. This article mainly introduces the sensor layout method and the steering and speed control strategy. Experiments prove that the system of sensor layout and control strategy can complement each other, making the car achieve the best state.
smart car; electromagnetic sensors; steering gear control; PID algorithm
TP368.1
A
珍
2013-12-03)
猜你喜欢
快乐语文(2020年36期)2021-01-14 01:10:32
防爆电机(2020年4期)2020-12-14 03:11:02
科学大众(2020年17期)2020-10-27 02:49:02
文苑(2018年22期)2018-11-19 02:54:18
电子制作(2018年8期)2018-06-26 06:43:02
能源(2017年5期)2017-07-06 09:25:57
中国科技信息(2016年15期)2016-11-04 12:47:31
中国卫生(2015年2期)2015-11-12 13:13:48
创业家(2015年1期)2015-02-27 07:52:12
新高考·高一物理(2012年5期)2012-04-29 20:27:57