浅析吉牛水电站距离保护行为
2014-08-29 04:55姚福明,李政
四川水力发电 2014年1期
姚 福 明, 李 政
(国电大渡河水电开发有限公司,四川 成都 610041)
革什扎河流域总装机容量为42.3万kW,其中吉牛水电站为24万kW。吉牛水电站220 kV线路与丹巴500 kV变电站相连,其线路距离保护是确保电站安全稳定运行的重要方面。暂态稳定分析的重要内容是评估暂态期间保护系统的行为。暂态稳定关心的是电力系统遭受严重干扰下保持同步的能力,因而保护系统的满意行为对保证系统稳定性是至关重要的[1]。保护继电器必须能够区分稳定的系统摇摆和失步情况。当继电器启动断路器操作切出故障元件时,确保在稳定的功率摇摆期间没有引起进一步的继电器动作,从而使非故障元件不必要的开断是很重要的。非故障元件的跳开将进一步恶化系统并可能导致系统不稳定。
距离保护对所测量的电压和所测量的电流之比起反应。当表示网络有效阻抗的上述比率小于继电保护设定值时继电器动作。虽然直接距离保护能对许多情况提供适当的保护,然而,当线路两端的同时高速跳闸对维持系统稳定十分重要时,其不能令人满意。纵差保护方案则适合于此类应用。
1 吉牛水电站距离保护方案
纵差距离保护方案需要使用它们所保护的线路两端的通信通道。装在每一端的继电器要确定故障是保护线路的内部还是外部,该信息要通过通信通道在线路两端间传送。对于内部故障,受保护线路两端的断路器均跳闸;而对于外部故障则需闭锁跳闸。图1为吉牛水电站距离保护方案运行原理图。
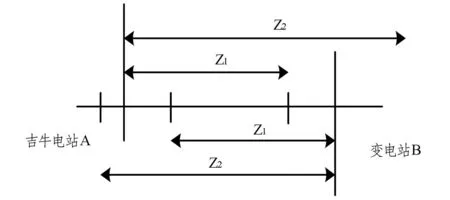
图1 吉牛水电站距离保护方案原理图
图1中区域1的相间和接地方向距离保护覆盖线路阻抗的80%。继电器的动作导致当地断路器跳闸。继电器无需远端的信息即可瞬时动作。
区域2的相间和接地方向保护覆盖被保护线路阻抗的120%。保证检测到所有区内的故障,在经约25 ms的延迟后,如果没有闭锁信号从远端发来即跳开当地断路器。该延时是等待从另一端送来闭锁信号的时间。如果在0.4 s时未切除故障,区域2即跳开当地断路器,而不管是否收到远端的闭锁信号。
图2为吉牛水电站典型区域1和区域2的继电器特性。如果吉牛水电站站内的继电器所测量到的视在阻抗在区域1特性圆内,在吉牛水电站内的断路器就会立即跳闸。
如果两端的继电器测量到的视在阻抗都在区域2的特性圆内,两侧的断路器将以高速跳闸。
如果视在阻抗仅在电站继电器的区域2的特性圆内,则电站的断路器在0.4 s的时延后跳闸,条件是该阻抗在区域2内保持0.4 s[2]。
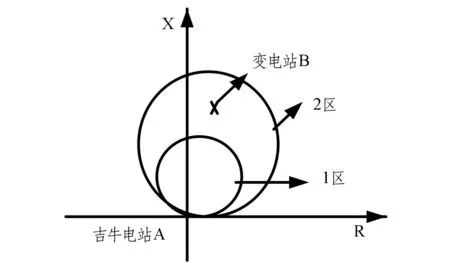
图2 吉牛水电站A继电器保护特性图
2 摇摆过程中的距离保护行为
继电器的行为取决于两端所测量的阻抗。在机电振荡时,由距离继电器所测量到的阻抗可能在继电器特性圆之内。视在阻抗的实际轨迹取决于发电机内电压,励磁调节器和调速器动作的变化也取决于系统中受互联网络影响的所有电机之间的相互作用。由文献[3]知,在两机系统中,当线路两端的电压幅值相等时,阻抗的轨迹呈现一条直线,它与整个系统阻抗垂直平分线。从两端内节点到阻抗轨迹上任何一点的接线所形成的角等于相应的功角δ,当δ=0时,电流为零,阻抗为无穷大。当δ=180°时,电气中心的电压为零。因此,继电器实际上看到的是电气中心处的三相故障。此时,电气中心和阻抗中心重合在一起。吉牛水电站通过一个强输电系统与主系统相连,电气中心可能在升压变压器内或者可能就在发电机本身内。在系统扰动后,角度、电压和电流都在不断变化。起初转子角变化很快,在稳定情况下当其达到峰值后变化缓慢;然后角度下降,振荡也变化更小直至达到平衡点。如果系统不稳定,角度逐渐增加直至其达到180°,即滑过一个磁极。除非系统被继电保护系统解列,否则接下来会更快速地连续滑过磁极。在滑动期间,电气中心附近点的电压和视在阻抗很快地振荡[4]。
在功率摇摆的情况下,用逐步稳定仿真计算求出继电器的阻抗,并与继电器的动作特性相比较,所计算出的视在阻抗的轨迹以及继电器特性如图3所示。
一个定时的第二区域与高频闭锁线路两端之间通信的保护行为并不取决于线路两端的继电器。如果两端的阻抗轨迹在第二区域特性内足够长以使定时器动作或进入了第一区域特性内,则跳闸动作。
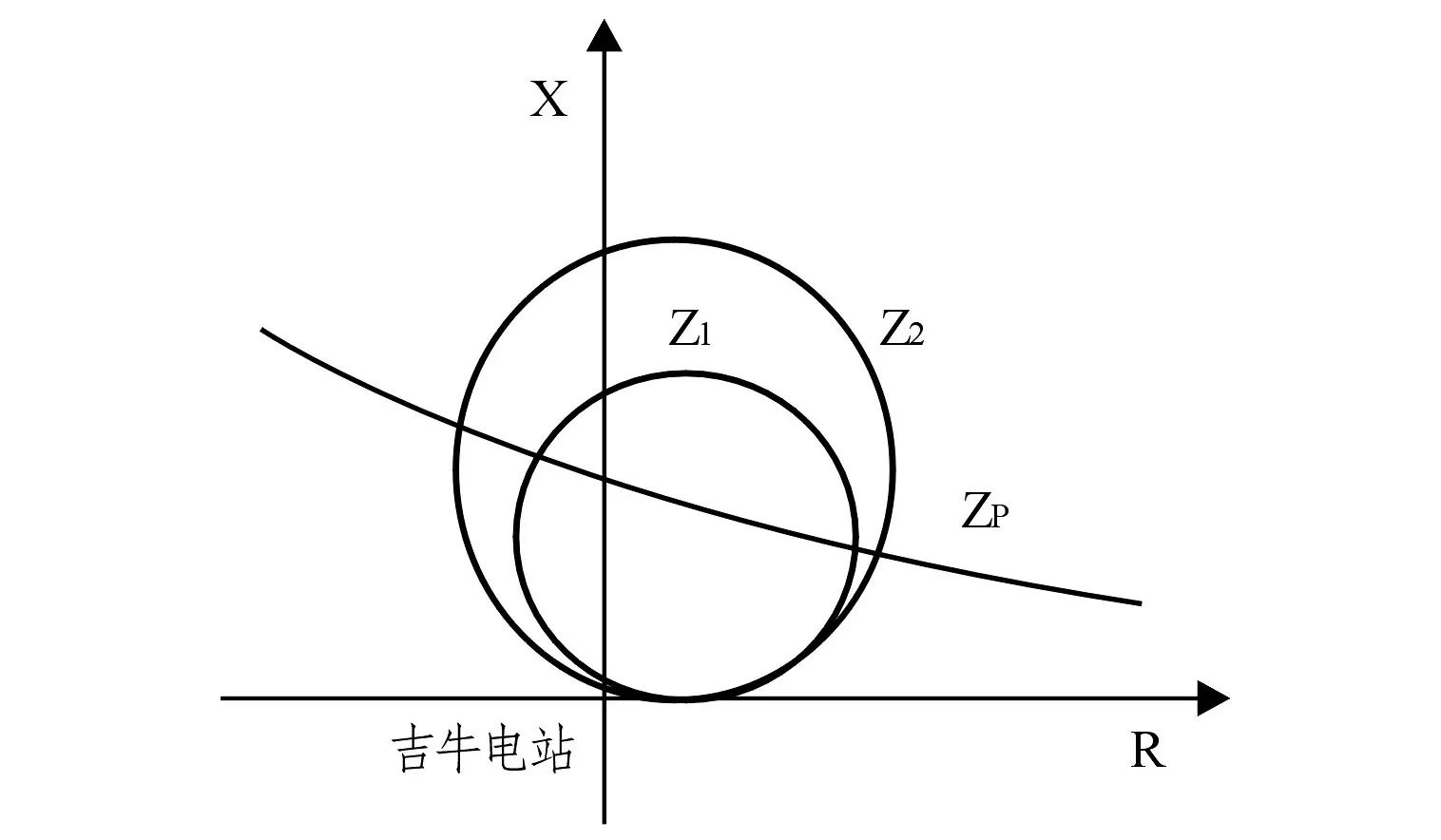
图3 阻抗的轨迹及继电器特性示意图
3 防止在暂态情况下的跳闸
纵差高频保护要求在稳定摇摆过程中防止跳闸,同时允许在不稳定暂态下跳闸。在摇摆过程中,发电机的电流和电压有较大地周期性变化,其频率是其磁极滑差率的函数,这可能导致绕组应力和脉动转矩,它们可以激发有危害作用的机械振动。经验表明:对于线路较短,线路阻抗小于发电机总阻抗时,较小的跳闸特性是令人满意的[5]。文献[6]利用具有线性特性的“欧姆”元件来控制摇摆时的跳闸角度范围;文献[7]利用算法实现“凸透镜”和“花生状”特性用于线路保护,具有优良的响应特性。在吉牛水电站高频保护中,使用失步继电器的工作原理防止电压下降太快而快速跳闸。失步继电器对于稳定摇摆不动作,它们必须检测到所有不稳定摇摆,而且其设定值在正常负荷下不启动。失步闭锁在线路保护动作之前检测其条件。为了确保在故障情况下线路保护不被闭锁,失步闭锁的设定值使正常负荷情况不在闭锁区域内。
4 故障切除时间
为了充分测试距离保护行为的快速性,需要对故障切除时间做定性的分析。故障元件的切除需要继电保护系统检测所发生的故障并启动断路器,它将使故障元件从系统中分离出去。因此,总的故障切除时间的构成是继电器动作时间和断路器开断时间。继电器动作时间是从短路电流初始时间把跳闸信号送到断路器的时间。断路器开断时间是从跳闸信号启动到断路器电流断开的时间。图4给出了正常切除故障的时间。母线A、母线B同为3周波的断路器。系统通信媒介为光纤。考虑在母线A的继电器的区域1内和母线B的继电器的区域2内(但在区域1外)的故障。图4所示的典型继电器时间如表1所示。从母线A切除故障的时间是91 ms,而从母线B切除故障的时间是114 ms。
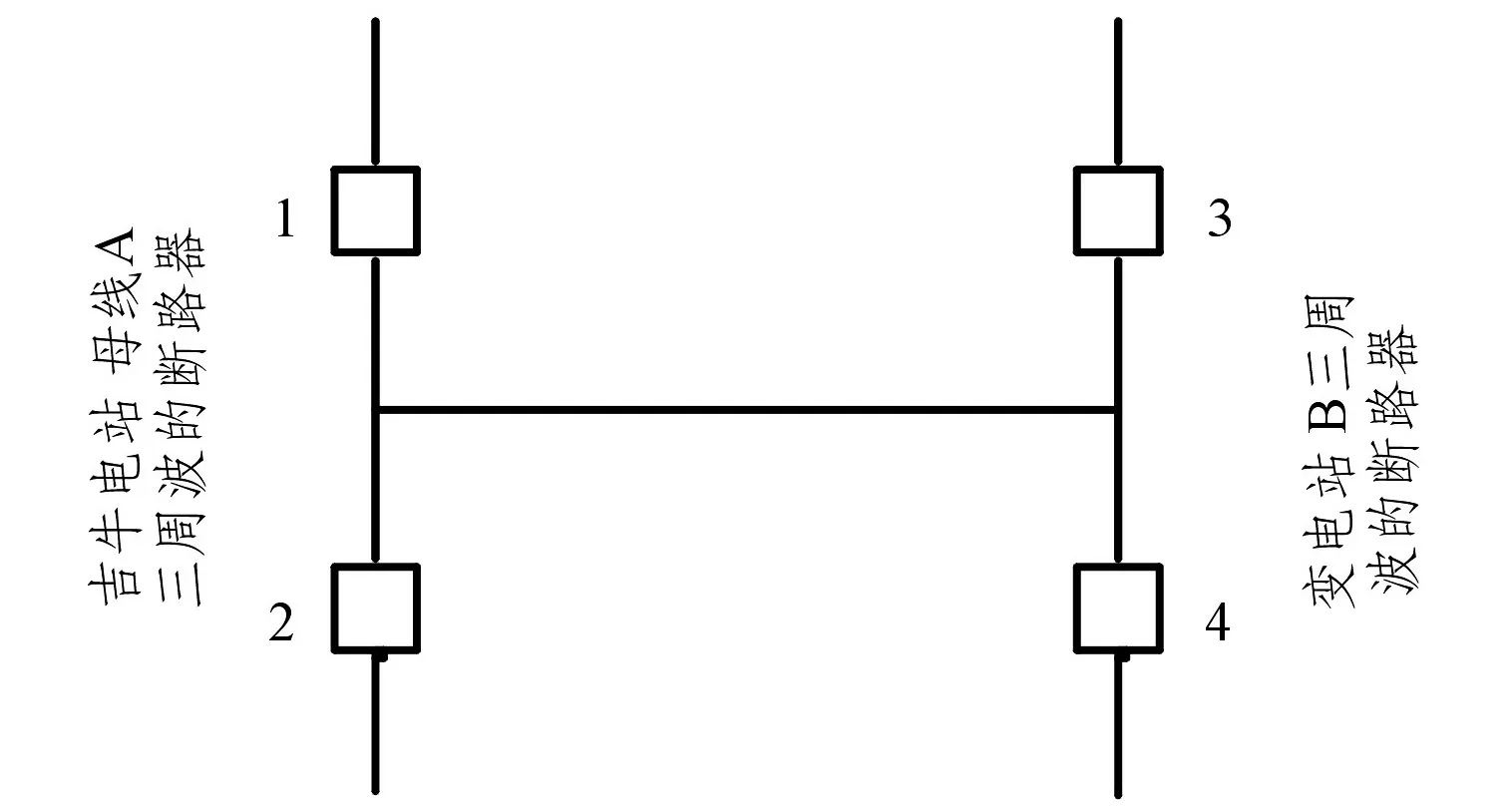
图4 断路器接线示意图
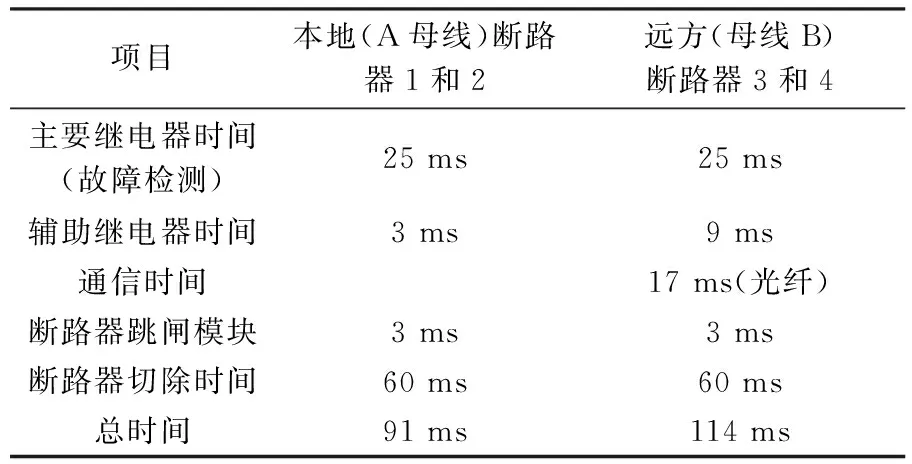
表1 正常切除故障的典型故障切除时间表
5 结 语
距离保护通过监视系统的适当参量来检测不正常的存在,从而决定应跳开哪一个断路器以及向这些断路器的跳闸回路加电。优良的纵差高频保护方案不但能够满足对被保护线路全线任何地点的任何故障均能瞬时有选择性地切除,而且能
够保证机组在稳定摇摆过程中防止跳闸,同时允许在不稳定暂态下跳闸,甚至能够提高保护装置的自适应性[8]。保护装置的可靠性、快速性取决于通信的可靠性与通信时间,随着通信技术的发展、微机保护的成熟和保护算法的完善,大规模电网智能型距离保护是可以实现的。
参考文献:
[1] Westinghouse Electric Corporation,Applied Protective Relaying,a new “Silent Sentinels” publication,Newark,1976.
[2] J.H.Neher,A Comprehensive Method of Determining the Performance of distance Relays[J]. IEEE Trans on Power Systems,1989,56(2):833-844.
[3] IEEE Working Group Report,Out of Step Relaying for Generators[J]. IEEE Trans on Power Systems,2004,96(3):1556-1564.
[4] H.M. Rustebakke,Electric Utility Systems and Practices,John Wiley & Sons,1983.
[5] Edith Clarke, Impedances Seen by Relays during Power Swings with and without Faults[J]. IEEE Trans on Power Systems,2003,64(3):372-384.
[6] C.R.Mason,A New Loss-of-Excitation Relay for Synchronous Generators[J]. IEEE Trans on Power Systems,1995,68(2):1240-1245.
[7] C.R. Mason,Relay Operation during System Oscillations[J]. IEEE Trans on Power Systems,2000,6(3):1513-1514.
[8] 陈 皓.微机保护原理及算法仿真[M].北京:中国电力出版社,2006.
作者简介:姚福明(1970-),男,重庆长寿人,部长,高级工程师,硕士,从事水电工程建设技术与管理工作;
李 政(1975-,男,重庆忠县人,副处长,工程师,硕士,从事电力生产技术工作.
猜你喜欢
西北水电(2022年1期)2022-04-16
金桥(2021年8期)2021-08-23
铁道通信信号(2020年8期)2020-02-06
电子制作(2018年14期)2018-08-21
电子制作(2018年10期)2018-08-04
水利技术监督(2017年6期)2017-12-19
电子制作(2017年8期)2017-06-05
电子制作(2017年20期)2017-04-26
电子制作(2016年23期)2016-05-17
水电站机电技术(2014年5期)2014-09-26