基于Adams-Simulink的电机丝杠式偏转驱动机构控制系统设计与仿真
2014-08-23 10:47:10梁毅辰谷良贤胡寒栋
计算机与现代化 2014年4期
梁毅辰,谷良贤,胡寒栋
(西北工业大学航天飞行动力学技术重点实验室,陕西 西安 710072)
0 引言
偏转弹头技术是通过弹头偏转产生控制力的导弹控制技术,具有阻力低、可用法向过载大等特点[1-6]。现有的弹头偏转驱动机构方案如斜盘式和液压式存在响应时间长的问题[7-8],而采用新型材料的磁致伸缩杆式和压电陶瓷式等驱动机构[9],材料技术尚不成熟。为解决上述问题,本文设计电机丝杠式弹头偏转机构,该机构采用直流无刷电机通过丝杠驱动头部进行摆动,结构简单,易于实现。本文针对电机丝杠式偏转机构的特点,在传统的直流无刷电机双闭环控制系统的基础上对控制回路加以改进,设计变参数PID位置控制器对偏转位置进行控制并进行仿真。结果表明,与偏转斜盘式机构相比,电机丝杆式偏转机构可承受的铰链力矩大,精度高,响应速度快,是一种可行的弹头偏转驱动机构。
1 电机丝杠式弹头偏转驱动机构
电机丝杠式偏转驱动机构如图1所示,整个机构由4套电机、减速箱和丝杠组成,当需要弹头朝某个方向偏转时,相对的2组电机朝相反方向转动,带动丝杠朝2个相反方向运动,通过连杆对弹头形成“一推一拉”,弹头通过球铰与弹身连接,在丝杠和连杆的推动和牵引下,弹头绕球铰朝预定的方向偏转。
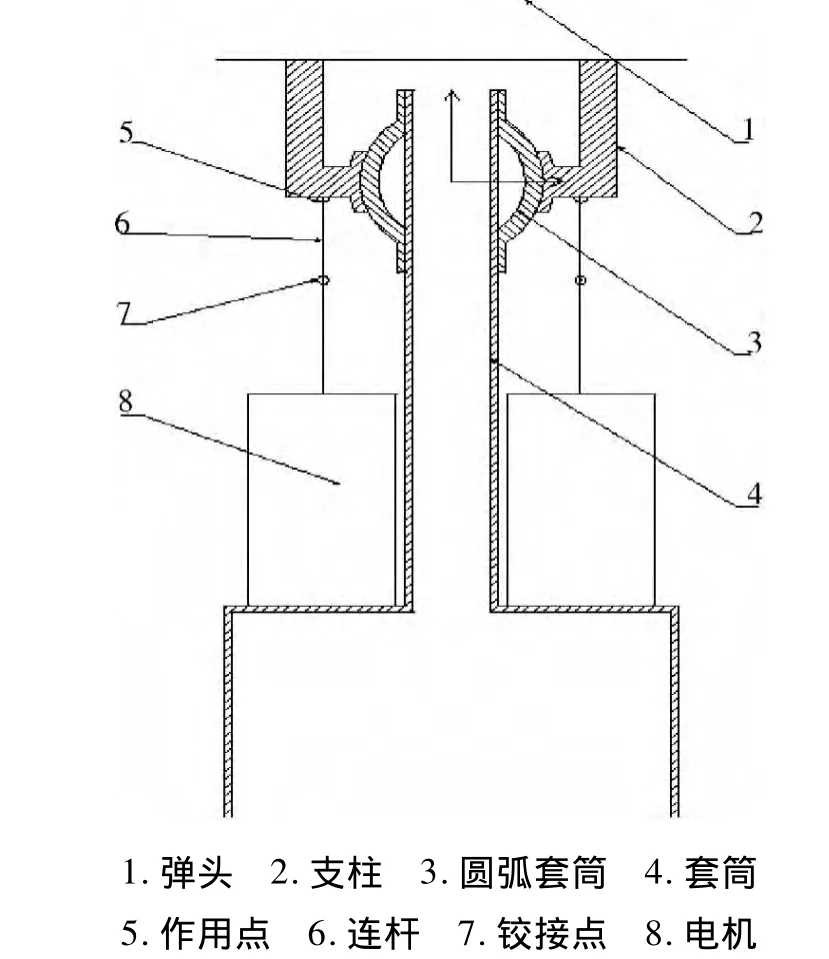
图1 电机丝杠式偏转弹头驱动机构示意图
2 弹头偏转机构数学模型
2.1 弹头偏转机构数学模型
4个电机的转动通过丝杠和连杆转化为平动,整个驱动结构可简化为图2所示的结构[10]。
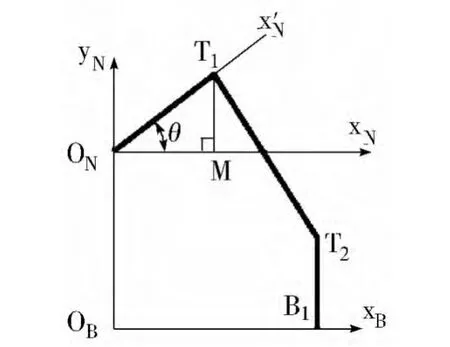
图2 驱动结构示意图
则4个连杆的转动角度如下:
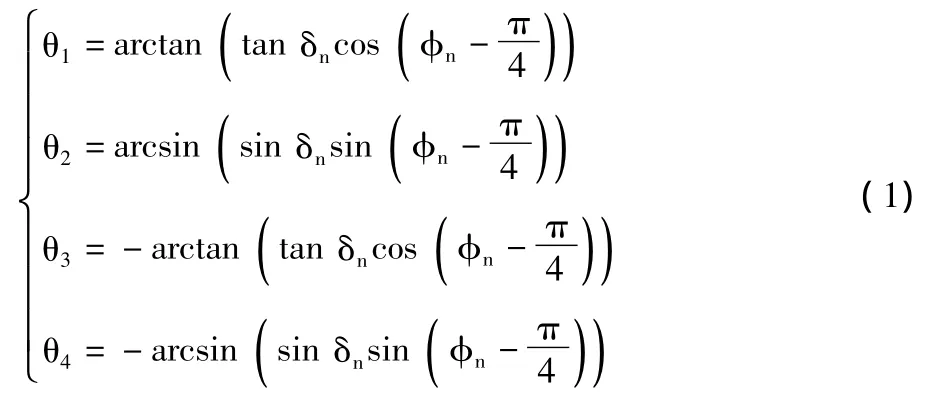
其中,δn为头部偏转角度,φn为头部偏转方位角。
每个电机的转动圈数与弹头偏转角度之间的关系如下:

其中,Qn为电机转动的圈数,丝杠的导程为P,减速器的减速比为η。
2.2 永磁无刷直流电机(BLDCM)模型
无刷直流电机是一种新型电机,它既克服了一般直流电机由于机械换向带来的缺点,又保持了一般直流电机方便调速的特点[11]。当无刷直流电动机采用径向励磁结构形式时,其动态特性与永磁直流电动机的动态特性相似,故本文以永磁直流电动机的数学模型作为无刷直流电动机的简化模型,来分析无刷直流电动机的动态特性。
直流无刷电机的传递函数如下:

其中La为电枢电感(H);Ra为电枢电阻(Ω);TL为负载转矩(N.m);Kt为转矩系数;RΩ为阻力系数;Ω为转子机械角速度(rad/s)。
该传递函数以外加电压U(s)和负载转矩TL(s)为输入量,以角速度Ω(s)为输出量,得出无刷直流电动机的动态结构图,如图3所示。
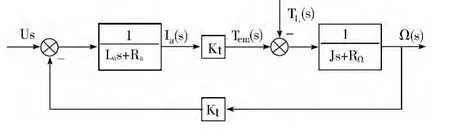
图3 无刷直流电机动态结构图
3 弹头偏转机构控制系统设计
3.1 弹头偏转机构控制系统组成与工作原理
电机丝杆式偏转弹头控制系统包括:
(1)控制指令生成装置:该装置将自动驾驶仪传来的弹头偏转角度和方位角指令换算成每个控制电机旋转到的位置;
(2)电机控制器:将控制指令放大,控制电机精确运动至所需位置;
(3)电机:永磁无刷直流电机;
(4)减速器:将电机输出的转矩减速以获得更大的扭力;
(5)丝杠传动装置:将电机的旋转运动转化成为丝杠的前进或后退运动以推动头部摆动;
(6)头部转动机构:将丝杠的进退转化为弹头的偏转。
弹头偏转机构控制系统接到导弹自动驾驶仪发来的弹头偏转角及方位角控制指令后,指令生成装置经过解算,将其换算成每台电机需要旋转到的位置,发送给控制器,驱动电机转动,经过减速箱及丝杠的传动,使丝杠进退至指定位置,以获得合适的弹头偏转角和方位角,该控制系统是一个典型的位置控制系统。
3.2 弹头偏转机构三闭环控制系统设计
弹头偏转机构控制伺服系统由4个电机与其相应的减速器以及丝杠组成,每个电机都采用位置环、速度环、电流环三闭环控制策略,电流环和速度环作为系统的内环,位置环为系统外环[12]。电流环是提高伺服系统控制精度和响应速度、改善控制性能的关键;速度环的作用是增强系统抗负载扰动能力,抑制速度波动;位置环的作用是保证系统的静态精度和动态跟踪性能。整个三环控制系统如图4所示。
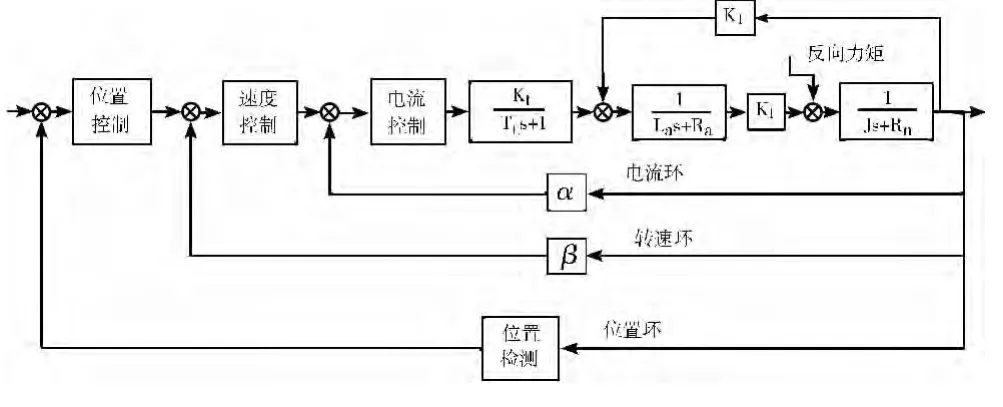
图4 偏转弹头电机控制系统示意图Ω
3.3 系统参数整定与仿真
电流环的控制对象为PWM逆变器和PMSM的电枢回路,它是一个电流随动系统,可快速跟踪给定的电流。按照调节器的工程设计方法,当电流调节器选为PI调节器时,电流环可变成I型系统,在0到额定转速均能够实时跟踪给定电流,在给定电流与实际电流间相位差较小,并随着转速的增加而增加,实际电流幅值与给定相等。速度环采用PI控制,其内环为电流环,控制信号与反馈信号融合之后,进入PI控制器,之后输入电流环。位置环是系统的最外环,由于位置传感器感应头部的偏角比较困难,因此用PID控制器对电机轴转过的圈数进行控制从而实现位置控制。由于电机限幅环节的存在,位置环的控制对象不是一个线性系统,在不同的输入下,控制对象的特征不同,增加了控制的难度。在此设计了变参数的PID控制器对位置环进行控制,在不同输入下采用Simulink中的Signal Constraint模块选出最优的PID控制器参数,在控制的过程中用插值方法选出最佳的控制器参数。在输入指令分别为1和10的条件下进行仿真,结果如图5所示,结果表明在不同的输入条件下,通过调整PID控制器的参数,都能获得较好的控制效果。
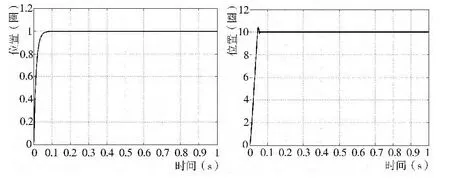
图5 仿真结果
4 偏转弹头控制机构Adams-Simulink联合仿真
4.1 弹头偏转驱动机构联合仿真模型的建立
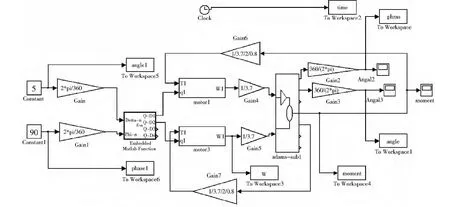
图6 Simulink-Adams联合仿真模型
在Matlab-Simulink中建立弹头偏转驱动机构联合仿真模型,模型主要由3部分组成,分别为电动机旋转圈数解算模块、电机模块以及机构Adams仿真样机模块(如图6所示)[13-14]。电动机圈数解算模块的任务是通过给定的δn和φn解算出每个电机需要转过的圈数,将其输入电机模块。电机模块中包含电机模型及电机控制模型,是一个位置随动系统,目的是让电机转过的圈数跟随输入信号,从而驱动机构快速精确地转动。该模块有2个输入参数,一个是控制量,即电机需要转过的圈数,另一个为电机轴上所受的反扭矩,由Adams仿真样机模块提供。Adams仿真样机模块根据电机模块输出的转速数据仿真出弹头偏转角度与方位角。
4.2 弹头偏转驱动机构联合仿真与分析
在上一节建立的Simulink-Adams联合仿真模型中,采用Runge-Kutta算法进行仿真。首先,输入指令使弹头偏转角度为5°,方位角为90°,在电机丝杠式偏转机构的头部加有50N·m的气动载荷,与不加气动载荷的偏转斜盘式机构的头部偏角与方位角响应比较如图7所示。
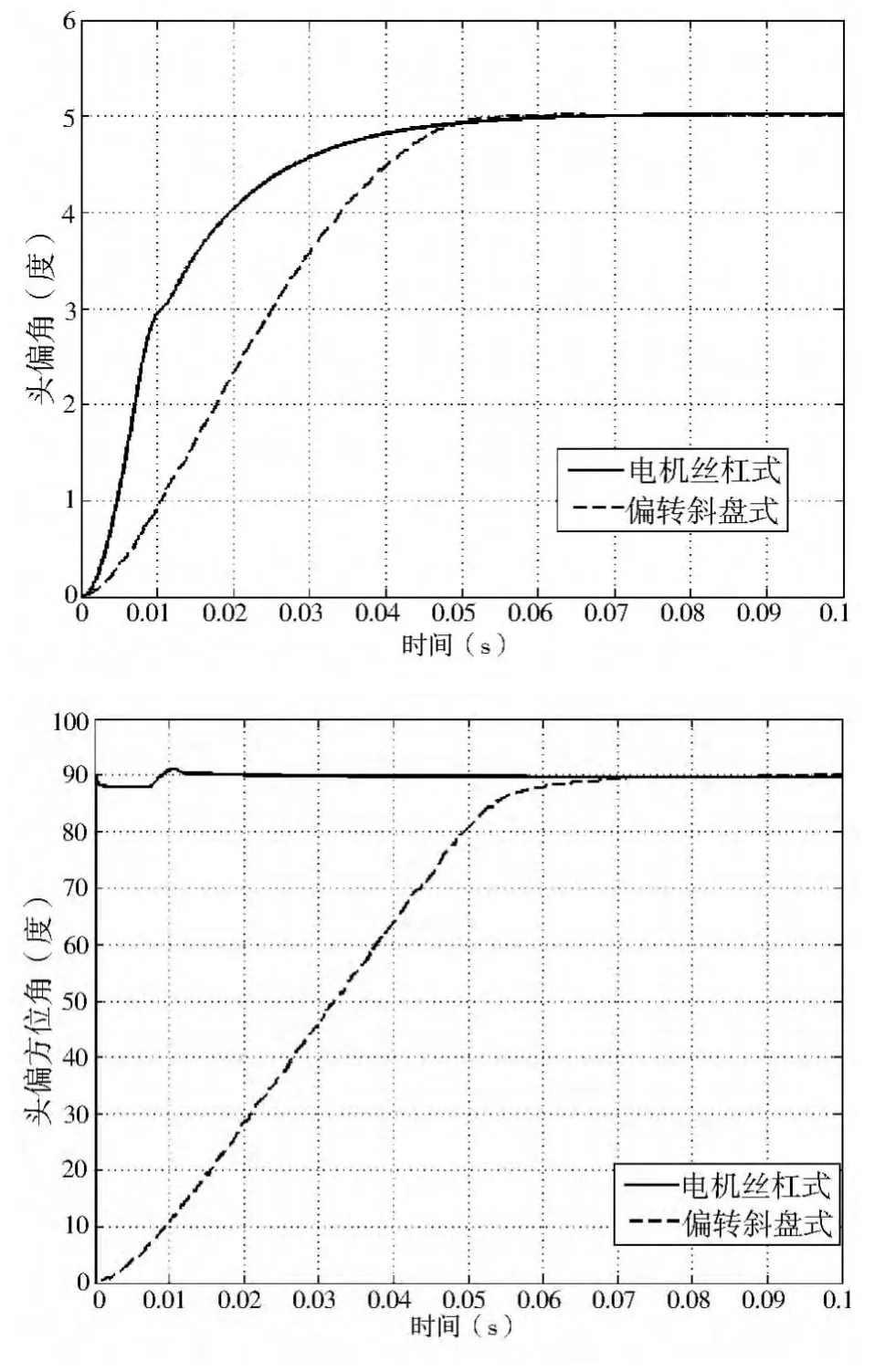
图7 头部偏角、方位角响应曲线比较
从图7可以看出,电机丝杠式机构头部偏角响应的上升时间小于0.04s,调节时间小于0.05s,比斜盘式时间短,方向角响应远快于斜盘式驱动机构。

图8 弹头偏角、方位角对于阶跃信号的跟踪响应
图8为导弹头部偏角和方位角对阶跃信号输入的响应曲线,从0时开始输入头偏5°,方位角为45°的指令,在0.5s变化为头偏 8°,方位角变为 90°,由图8可见系统对于输入信号的跟踪良好。
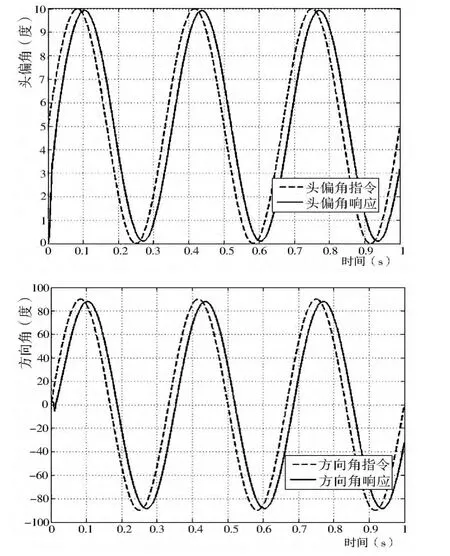
图9 弹头偏角和方位角对于正弦信号的跟踪响应
图9为导弹头部偏角和方位角对正弦信号输入的响应曲线,从图9中可以看出,机构对于正弦信号输入的跟踪良好。
5 结束语
本文设计了电机丝杠式偏转弹头驱动机构的控制系统,首先对控制系统进行了合理简化与建模,针对控制对象的非线性特征设计了变参数PID控制器,并对其参数进行整定使控制系统最优化。Adams-Simulink联合仿真结果显示,该控制系统精度和调节速度均满足控制需求,相比斜盘式机构响应更加快速准确,验证了电机丝杠式偏转弹头驱动机构的可行性。
:
[1]US Army Proposes‘Droop-Snoot’.Missile guidance[J].Jane’s Missiles & Rockets,2003,7(1):15.
[2]Landers M G,Hall L H.Deflectable nose and canard controls for a fin-stabilized projectile at supersonic and hypersonic speeds[C]//The 21st AIAA,2003.
[3]Thomson K D.Wind Tunnel Tests on a Tube-Launched Missile Configuration with a Deflectable Nose Control and a Novel Wrap-Around Fin Stabilizer[R].WSRL-0327-TR,Defense Research Centre Salisbury,South Australia,1983.
[4]Barrett R,Stutts J.Modeling,design and testing of a barrel-launched adaptive munition[C]//Proceedings of the 4th AnnualSociety ofPhoto-OpticalInstrumentation Tenineers Symposium on Smart Structures and Materials.San Diego,CA,1997:49-60.
[5]王旭刚,周军.偏转弹头导弹动态特性分析[J].宇航学报,2011,32(7):1446-1450.
[6]周军,王旭刚.偏转头导弹建模及控制方案设计[J].宇航学报,2008,29(3):878-882.
[7]高原,谷良贤,龚春林,等.一种偏转弹头控制系统方案的特性研究[J].弹箭与制导学报,2006,26(1):890-892.
[8]王明,谷良贤,高原.斜盘式偏转机构方案仿真研究[J].计算机仿真,2008,25(10):23-26.
[9]王建,樊少军,刁云鹏,等.战术导弹智能偏转弹头控制系统研究[J].科学技术与工程,2009,17(9):5123-5127.
[10]胡寒栋.偏转弹头导弹驱动机构设计[D].西安:西北工业大学,2012.
[11]刘彬.舵机用无刷直流电机控制系统研究[D].西安:西北工业大学,2004.
[12]谢志诚,李益华,林利红.无刷直流电机双闭环控制系统的建模与仿真[J].现代驱动与控制,2010(2):26-30.
[13]陈晋玮.基于Simulink的无刷直流电机仿真模型新策略[J].舰船电子对抗,2010,33(2):112-115.
[14]陶可妍,闫英敏.基于MATLAB无刷直流电机伺服系统的仿真[J].微计算机信息,2007,23(28):214-216.
猜你喜欢
大电机技术(2022年5期)2022-11-17 08:12:56
兵工学报(2022年9期)2022-10-11 01:25:48
制造技术与机床(2019年11期)2019-12-04 05:50:26
现代防御技术(2018年5期)2018-10-29 02:10:10
电子制作(2017年1期)2017-05-17 03:54:12
深圳职业技术学院学报(2015年5期)2015-11-30 06:22:25
淮南师范学院学报(2015年3期)2015-03-22 01:16:17
电机与控制应用(2015年1期)2015-03-01 03:49:10
机械制造与自动化(2014年1期)2014-03-01 04:21:45
机械与电子(2014年3期)2014-02-28 02:07:57