基于PPP的CGCS2000坐标计算方法研究
2014-08-15 12:53陈仲怀廖超明宋传峰秘金钟
测绘通报 2014年2期
陈仲怀,廖超明,宋传峰 ,秘金钟
(1. 广西壮族自治区测绘地理信息局,广西 南宁 530023; 2. 广西壮族自治区测绘地理信息档案资料馆,广西 南宁 530023; 3. 中国测绘科学研究院,北京 100830)
一、引 言
国际地球参考系(ITRS)是基于国际地球参考框架(ITRF)实现的,它是通过一组固定于地球表面且只作线性运动的大地点坐标及其坐标变化速率组成,ITRF序列是国际上公认的精度最高、稳定性最好的参考框架[1]。全球定位系统(GPS)的最终精密星历都是在该框架下表示的。2000国家大地坐标系(CGCS2000)是全球地心坐标系在我国的具体体现,2000国家大地坐标系框架是2000国家大地坐标系的具体实现,在该框架基础上完成的天文大地网联合平差获得了ITRF97框架下的近5万个一、二等天文大地网点和近10万个三、四等天文大地网点[2]。CGCS2000是我国建立并大力推广的全球地心坐标系,很多测绘成果最终都需要转换到CGCS2000下。
文献[3]介绍了ITRF(国际地球参考框架)的建立及不同ITRF框架基准的转换关系,文献[4]对我国2000国家大地坐标系的构建进行了介绍,文献[5]介绍了天文大地网坐标系统到2000国家大地基准的转换,本文在此基础上对ITRF与CGCS2000坐标转换方法进行了研究,并以广西CORS站PPP定位结果为例,验证了转换方法的可行性及正确性。
二、ITRF与CGCS2000坐标转换方法
我国2000国家大地坐标系的具体实现为2000国家大地控制网,定义为ITRF97,采用2000历元下的坐标和速度场。因此与ITRF框架坐标转换可按已公布的ITRF框架间的转换关系进行转换。ITRF与CGCS2000坐标间的转换可通过3个步骤来完成:不同框架间的转换、同一框架不同历元间的转换和实施框架转换。
1. 不同框架间的转换
不同框架间的转换是在特定历元下进行的, ITRF框架间的转换是由7个转换参数及其速率,共14个转换参数,来建立不同ITRF框架在转换历元之间的转换关系的。
(1)
即
(2)
表1为IERS公布的ITRF2008与ITRF2005、ITRF2000、ITRF97框架在2000.0历元下之间的转换关系。
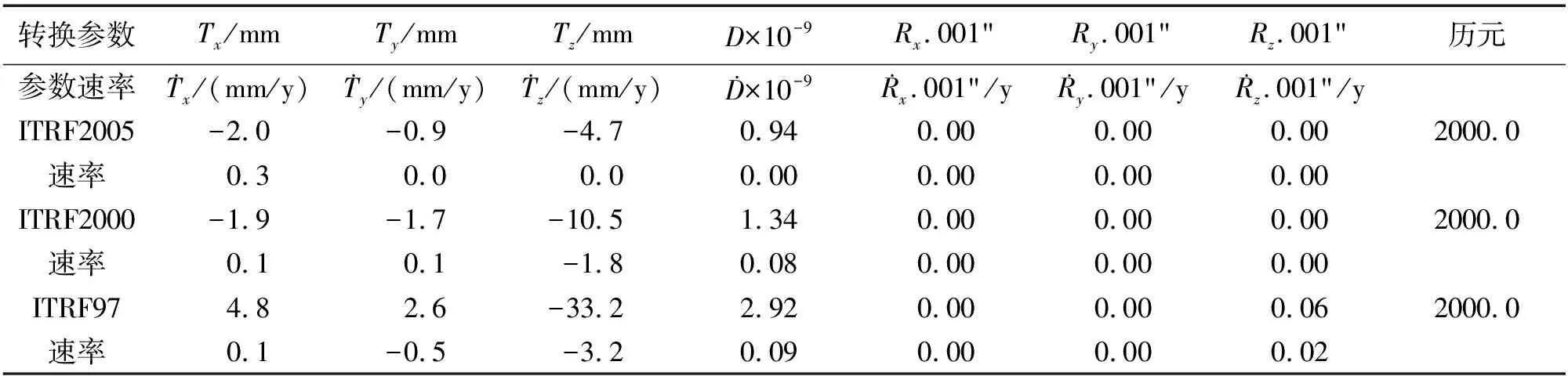
表1 由ITRF2008转换到ITRFyy的转换参数和速率
不同ITRF框架到CGCS2000所基于的ITRF97框架的转换参数可由上表计算得到,表2为推算得到的CGCS2000与ITRF2000、ITRF2005、ITRF2008框架在2000.0历元下的转换关系。

表2 ITRFyy系列框架转换到CGCS2000的转换参数与速率
2. 同一框架不同历元间的转换
同一框架不同历元间的坐标主要受板块运动的影响。板块构造学说认为,地球表面岩石圈由十几个板块构成,由于地幔对流的作用,这些板块之间存在着相对运动,运动的量级是1~10 cm/yr[6]。由于受到板块运动的影响,将导致地面台站的相对位置发生变化,因此在精确定位中应采取适当措施对站点坐标进行改正。对于有些具有实测站速度的台站(如ITRF框架点),可采用实测站速度进行板块运动改正,而对于有些不具有实测站速度的台站,可利用板块运动模型进行板块运动改正。目前板块运动模型有IERS规范推荐的NNR-NUVEL1A模型、利用空间大地测量技术实测资料建立的实时板块运动模型APKIM及PB2002等。
如果台站为ITRF框架点,则其速度可以从ITRF网站(http:∥itrf.ensg.ign.fr)获取,若测站不是ITRF框架点(如我国大部分CORS站及GNSS观测站),则其速度一般是未知的,可以利用板块运动模型近似得到其速度矢量。每个板块的角速度分量都可从地球物理模型中计算得到,则测站的速度矢量可表示为
(3)
式中,vx为台站的速度矢量;x代表台站的位置矢量;Pi则表示台站所在的运动板块;Ω为绕通过运动板块原点的旋转轴旋转的角速度矢量(单位为秒/百年),由于角速度矢量数值非常小,可直接采用上面的近似公式。
经板块运动改正后的台站坐标可表示为
(4)
式中,t取为2000.0;tk表示台站坐标所在的历元;ITRFyy表示台站坐标所在的框架。
在实际应用中,若台站与ITRF框架点属于同一个严格板块,且台站在ITRF框架点周围±3°内,则台站的速度可由具有实测速度场的ITRF框架点近似代替。
3. 实施框架转换
经同一框架不同历元间的转换可获得台站在ITRFyy框架下2000.0历元的坐标,再经特定历元下不同框架间的转换,即可获得台站在CGCS2000下的坐标。因此由框架变化引起的台站坐标改正可表示为
(5)
式中,(X,Y,Z)为台站的CGCS2000坐标;(x(t),y(t),z(t))为台站在ITRFyy框架下2000.0历元的坐标;t=2000.0表示括号中的7个转换参数是基于2000.0历元的。
三、广西CORS站PPP定位结果坐标转换
PPP技术是指利用IGS分析中心或其他机构提供的精密轨道和钟差信息,用户站通过改正厘米级以上的系统误差,实现厘米级到分米级精度的绝对定位[7]。在已知广西CORS站CGCS2000坐标的基础上,本文利用IGS提供的GPS最终精密星历(ITRF08框架)和最终精密钟差进行PPP计算,由于PPP获取的是绝对位置,由此可得到广西CORS站在ITRF08框架下瞬时历元(2013年第206天)的坐标。表3为广西CORS站已知的CGCS2000坐标和PPP计算得到的ITRF08框架下瞬时历元坐标,表4为两者之间的坐标差。
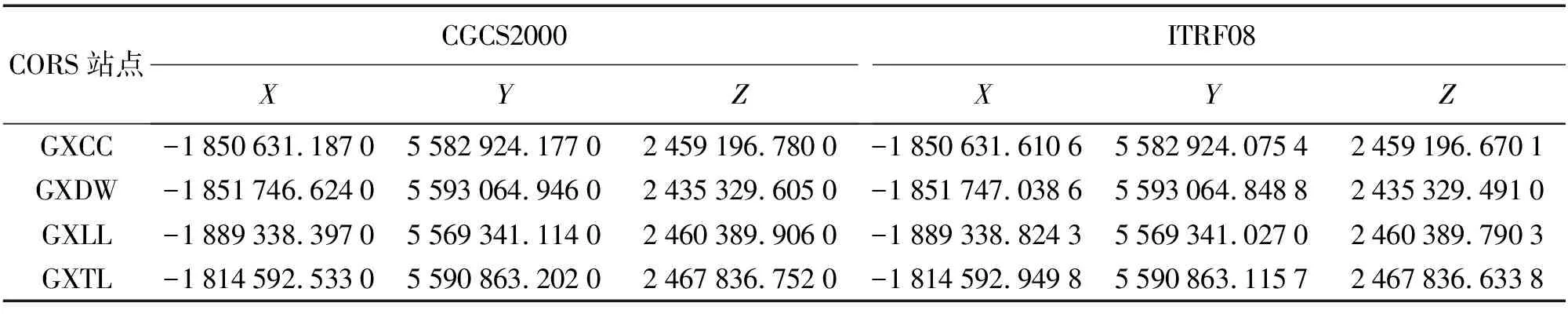
表3 广西CORS站CGCS2000坐标与ITRF08框架瞬时历元坐标 m
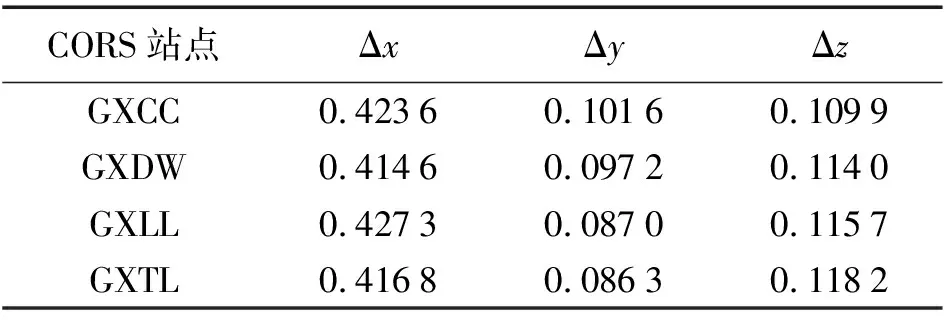
表4 广西CORS站CGCS2000与ITRF08框架瞬时历元坐标差 m
由表4可知,PPP计算得到的广西CORS站ITRF08框架瞬时历元坐标与CGCS2000坐标存在明显的差异,这种差异包括不同框架与不同历元的系统差异,以及PPP计算的精度限制。将ITRF08框架下瞬时历元坐标利用上文介绍的方法进行框架转换,然后分别以各CORS站为站心,将经框架转换后的坐标转为站心坐标系。表5为广西CORS站PPP计算结果(框架转换后)与真实坐标在CGCS2000下的坐标差,图1为其站心坐标表示。由表5可知,经框架转换后的坐标差异已无明显的系统性,只受PPP计算精度限制的影响,从图1中可知PPP计算结果与真实坐标比较的坐标差均在2cm内,这与当前PPP计算精度是相符合的。
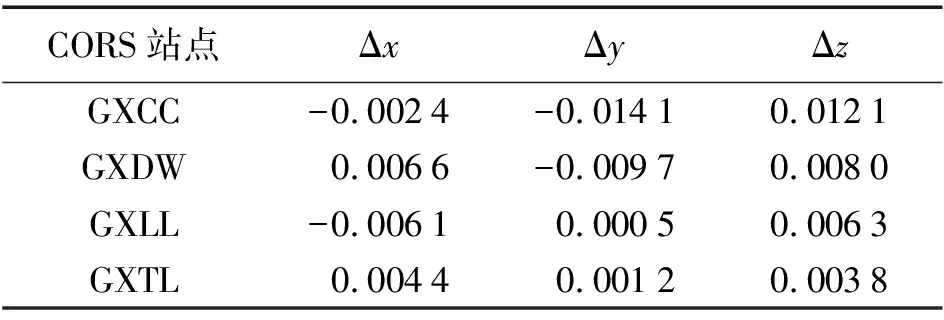
表5 广西CORS站PPP计算结果与真实坐标在CGCS2000坐标系下的坐标差 m
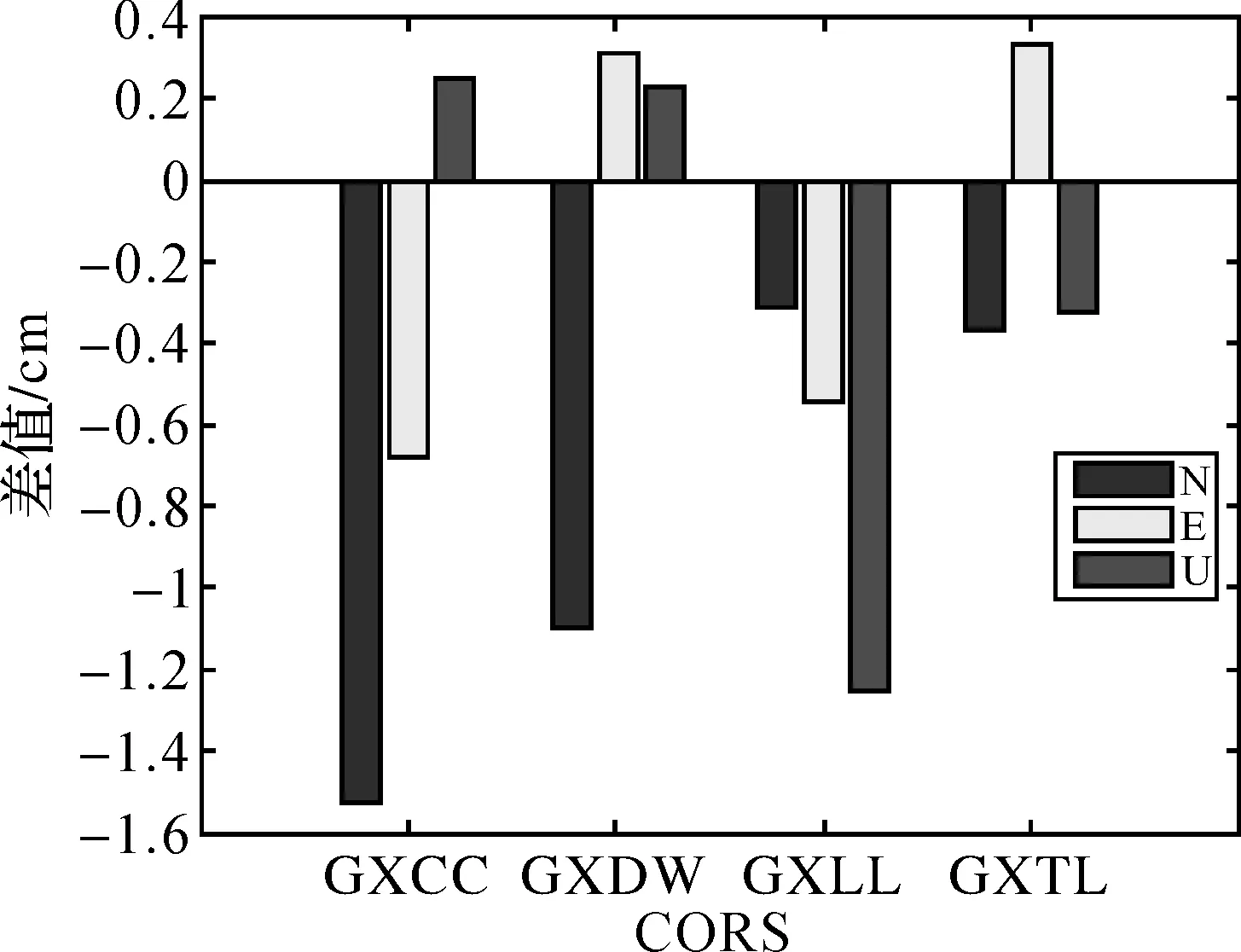
图1 广西CORS站PPP计算结果与真实坐标比较
四、结束语
ITRF与CGCS2000坐标之间的转换对绝对定位成果的使用至关重要,由此本文对两者之间的转换方法进行了研究,给出了详细的转换步骤,然后对广西4个CORS站进行了PPP绝对定位计算并经过框架转换改正,结果显示本文给出的ITRF与CGCS2000坐标转换方法是正确的、可行的。
参考文献:
[1] 党亚民,秘金钟,成英燕.全球导航卫星系统原理与应用[M].北京:测绘出版社,2007.
[2] 党亚民,成英燕,薛树强.大地坐标系统及其应用[M].北京:测绘出版社,2010.
[3] 余方达,郝国芳. ITRF框架基准在高精度GPS测量中的统一[J].孝感学院学报,2002,22(6):83-85.
[4] 杨元喜. 2000中国大地坐标系[J].科学通报,2009,54(16):2271-2276.
[5] 李军. 天文大地网坐标系统到2000国家大地基准的转换[J].测绘通报,2004(3):1-3.
[6] 孙付平,赵铭. 现代板块运动的量测和研究:空间大地测量方法[J].天文学进展,1995(2):132-142.
[7] 李玮. GPS/BDS精密单点定位及其电离层研究与应用[D].武汉:武汉大学,2013.
猜你喜欢
中国科学院院刊(2022年8期)2022-09-02
测绘学报(2022年5期)2022-05-31
中小企业管理与科技·下旬刊(2021年1期)2021-03-02
中学生数理化(高中版.高考理化)(2020年9期)2020-10-27
小哥白尼(神奇星球)(2020年3期)2020-07-27
中国惯性技术学报(2020年2期)2020-07-24
股市动态分析(2016年5期)2016-09-29
西藏科技(2015年6期)2015-09-26